
Структурный синтез автоматов управления системами обработки информации реального времени
| Вид материала | Автореферат |
- Структурный синтез гетерогенных подсистем обработки информации в многофункциональных, 386.94kb.
- Алгоритмы обучения и архитектура нейронных сетей. Нейросетевые системы обработки информации, 21.42kb.
- Рабочая программа По дисциплине «Цифровые методы обработки аудио визуальной информации», 267.73kb.
- Рабочей программы учебной дисциплины "Теория автоматов", 18.22kb.
- Программа вступительного экзамена по специальности 05. 13. 06 " автоматизация и управление, 128.46kb.
- Учебно-методический комплекс дисциплины «Математическая логика и теория алгоритмов», 376.44kb.
- Рабочая программа дисциплины «Автоматизированные системы обработки экономической информации», 306.21kb.
- Рабочая программа По дисциплине «Надежность, эргономика и качество асоиу» По специальности, 197.76kb.
- Рабочая программа по дисциплине «Математическая логика и теория алгоритмов» для специальности, 67.42kb.
- Представлен лабораторный комплекс в составе стенда на базе микропроцессорного модуля, 24.28kb.
На правах рукописи
Мухопад Александр Юрьевич
Структурный синтез автоматов управления
системами обработки информации реального времени
Специальность 05.13.01 – Системный анализ, управление и обработка информации
(информатика, вычислительные машины и автоматизация; энергетика)
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Братск 2010
Работа выполнена в ГОУ ВПО ФАЖТ
«Иркутский государственный университет путей сообщения»
Научный руководитель:
доктор технических наук, профессор Дунаев М. П.
Официальные оппоненты:
доктор технических наук, профессор Алпатов Ю. Н.
доктор технических наук, доцент Кузнецов Б.Ф.
Ведущая организация: ГОУ ВПО «Новосибирский государственный технический университет»
Защита состоится в 12-00 часов 16 апреля 2010г. на заседании диссертационного совета Д 212.018.01 в ГОУ ВПО «Братский государственный университет» по адресу: 665709, г. Братск Иркутской обл., ул.Макаренко, 40.
С диссертацией можно ознакомиться в библиотеке ГОУ ВПО «Братский государственный университет».
Ваш отзыв на автореферат в 2 экземплярах, заверенный печатью организации, просим выслать в адрес диссертационного совета.
Автореферат разослан 18 февраля 2010г.
Ученый секретарь
диссертационного совета Игнатьев И.В.
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
В системах обработки информации реального времени (СРВ) реализация процессов управления с помощью микропроцессоров или микроконтроллеров не только является избыточной, но и приводит к снижению быстродействия на 2 – 3 порядка по сравнению с аналоговой или специальной дискретной реализацией. В специальных микроэлектронных системах управления, реализуемых на базе больших интегральных схем (БИС ПЗУ), программируемых логических матриц (ПЛМ) и программируемых логических интегральных схем (ПЛИС), внутренние подсистемы синхронизации и выработки управляющих команд (микропрограммные автоматы – МПА) могут составлять до 30 -50% объема оборудования, и именно эти подсистемы определяют конструктивную сложность, энергопотребление и надежность всей системы управления технологическим процессом. Поэтому разработка новых методов синтеза и структурной организации СРВ и МПА, позволяющих реализовать заданные алгоритмы управления на БИС меньшей сложности, с меньшим энергопотреблением и обеспечивающих более высокий уровень надежности и безопасности, является весьма актуальной как в научном, так и практическом плане. Значимость исследований определяется также тем, что они относятся к числу приоритетных научных направлений, определенных постановлениями Правительства РФ.
Целью работы является:
- совершенствование существующих методов и средств обработки информации с проблемно-ориентированными устройствами управления сложными техническими системами реального времени.
Методы исследования базируются на использовании системного анализа, теории графов, абстрактной и структурной теории автоматов, теории контроля и диагностики. В работе сочетаются формальные и содержательные подходы, а также метод моделирования на ЭВМ.
Научная новизна работы заключается в следующем:
- предложена методика синтеза МПА, основанная на преобразовании граф-схемы алгоритма с перекоммутацией логических условий (входных переменных МПА);
- предложена структурная организация МПА, в которой за счет последовательной подачи q логических условий с помощью мультиплексора сложность комбинационной схемы для определения кодов состояний автомата снижается в 2q - 1 раз;
- модифицирован известный и предложены новые способы контроля МПА в процессе функционирования и резервирования комбинационной схемы МПА;
- предложена дискретная реализация СРВ для стабилизации мощности лазерного излучения, цифрового адаптивного фильтра и быстродействующих спецпроцессоров криптографической защиты информации (три патента на полезные модели) с новой структурной организацией функциональных преобразователей информации.
Практическая значимость заключается в том, что предложенные в диссертации научные разработки дают возможность проектировать и реализовать на БИС более простые (по сравнению с известными методиками) системы управления мехатроникой, технологическими процессами в машиностроении, приборостроительной и электронной промышленности и в быстродействующих технических СРВ.
Реализация и внедрение результатов работы. Основные результаты работы в
виде методики синтеза, обеспечения контролеспособности и повышения надежности
МПА нашли применение при проектировании дискретной системы управления для
стабилизации мощности газового лазера в службе Локомотивного хозяйства Восточно-Сибирской железной дороги ОАО РЖД, а также при проектировании медицинского прибора «Мультимед» в ООО «Байкальский научно-инженерный центр». Спецпроцессоры криптографической защиты информации апробируются соответствующими подразделениями ВСЖД ОАО РЖД. Материалы диссертации и разработанный на их основе программный комплекс с применением Matlab используются в учебном процессе Иркутского государственного университета путей сообщения в разделах курсов « Теория дискретных устройств», «Технические средства реализации информационных процессов», « Проектирование мехатронных модулей».
Достоверность результатов подтверждается:
- результатами сопоставительного анализа с типовыми решениями;
- результатами моделирования и эксперимента на ЭВМ.
Апробация работы проводилась на межвузовской научной конференции с участием Института динамики и теории систем управления (Иркутск, СО РАН, 1996), на III и IV Международных конференциях «Проблемы механики и современных машин» (Улан-Удэ, 2006 и 2009г.г.); XIV Байкальской Всероссийской конференции «Информационные и математические технологии в науке и управлении» (Иркутск, 2009); XXII Международной научной конференции «Математические методы в технике и технологиях (Псков, 2009г.); VII Всероссийской научно-практической конференции студентов, аспирантов и молодых ученых «Молодежь и современные информационные технологии» (Томск, 2009); III Всероссийской конференции «Развитие науки и высшего образования» (РАЕ, Сочи, 2009); на XIII Международной научно-практической конференции «Системный анализ в проектировании и управлении» (Санкт-Петербург, 2009); в Международной научной школе «Фундаментальные и прикладные проблемы надежности и диагностики машин и механизмов» (Санкт - Петербург, 2009); на Всероссийской конференции « Актуальные проблемы развития гражданской авиации России» (Иркутск, 2009), а также на научно-технических семинарах Иркутского государственного университета путей сообщения и Братского государственного университета.
Публикации. По материалам диссертации опубликовано 17 работ, в том числе 3 статьи в журналах, рекомендованных ВАК РФ, 1 публикация в зарубежном журнале, 3 параграфа в учебных пособиях с грифом УМО, 5 патентов на полезные модели, 8 работ в едином авторстве. В работах с соавторами соискателю принадлежит от 40 до 60% результатов. Положения, составляющие новизну и выносимые на защиту, получены лично автором.
Структура и объем работы. Диссертационная работа состоит из введения, четырех глав, заключения, списка литературы. Работа содержит 175 страниц, включая текст, 75 рисунков, 38 таблиц и список литературы из 176 наименований. В приложении – акты о внедрении и краткие описания 5 патентов.
ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении обоснована актуальность исследований, определены их цели и задачи.
В первой главе диссертации приводится анализ публикаций по вопросам проектирования информационно-управляющих систем реального времени и синтеза микропрограммных автоматов (МПА). Рассматривая МПА как систему, в ней выделяются пять подсистем: Ф - функциональная, определяющая формирование команд управления технологическим процессом или технической системой; И – информационная, используемая для хранения кодов состояний; A –адресная, необходимая для преобразования конкатенации кода состояния a(t) и кортежа логических условий α1, α2,…, αq в код состояния a(t+1); Л – логическая, формирующая или выбирающая логические условия; У – управляющая, обеспечивающая генерацию импульсов синхронизации переходов в МПА.
Для организации управляющих подсистем в СРВ наибольшее применение нашли автоматы Мура, функционирование которых задается уравнениями (1)
a(t+1) = F1(а(t), α1, α2, …, αq) ; A(t) = F2(a(t)); (1)
где a(t) и a(t+1) – настоящее (t) и последующее (t+1) состояние автомата; F1 и F2 - системы булевых функций; A(t) – выходные команды МПА; αj
 {α} - входные логические переменные (условия). Одновременное использование конкатенации {α}a(t) для определения a(t+1) приводит к необходимости применения комбинационных схем большого объема. Существующие теории минимизации МПА рассчитаны на БИС малой и средней интеграции и малоэффективны при синтезе сложных МПА при ориентации на сверхбольшие интегральные схемы (СБИС): ПЛМ, ПЛИС и микроконтроллеры.
{α} - входные логические переменные (условия). Одновременное использование конкатенации {α}a(t) для определения a(t+1) приводит к необходимости применения комбинационных схем большого объема. Существующие теории минимизации МПА рассчитаны на БИС малой и средней интеграции и малоэффективны при синтезе сложных МПА при ориентации на сверхбольшие интегральные схемы (СБИС): ПЛМ, ПЛИС и микроконтроллеры. Наиболее сложной является А-подсистема, реализуемая для простых автоматов как комбинационная схема на элементах логики, ПЗУ или ПЛМ, а для сложных автоматов - на ПЛМ или ПЛИС. А-подсистема МПА, реализуемая через ПЗУ, имеет объем V = m2m+q бит, где m -разрядность кода a(t), q – число логических условий. В диссертации предложено классифицировать автоматы на четыре группы по сумме общего числа переменных (m+q) А-подсистемы: сверхпростые (m=3, q≤5), простые (m=4, q≤8), средней сложности (m=5, q≤12) и сложные (m=6, q≥16).
Простые и сверхпростые автоматы используются для управления аналого-цифровыми и цифровыми таблично - алгоритмическими преобразователями информации как составными частями СРВ. Для управления самими СРВ используются автоматы средней сложности и сложные автоматы в зависимости от количества блоков в них и специфики алгоритма управления. Поэтому в диссертации проблемы анализа и синтеза МПА формулируются применительно к последним двум типам автоматов.
При реализации А- подсистемы на ПЛМ необходимо реализовать систему булевых функций F1 от m+q переменных
y1=R1(xm…x2x1; αq… α2α1)
y2=R2(xm…x2x1; αq… α2α1) (1)
- - - - - - - - - - - - - - - - - - -
Ym=Rm(xm…x2x1; αq… α2α1)
Сложность реализации F1 на ПЛМ объясняется тем, что число возможных комбинаций K=2m+q на входе схемы F1 для простых автоматов составляет 4096, для средних -128 тыс. и сложных- более 4 млн. Поэтому для сложных и средней сложности автоматов непосредственное «вложение» системы булевых функций R1R2… Rm в ПЛМ не осуществляется, а ставится задача реализации уравнения a(t+1) = F1(a(t), αq… α2α1 ) несколькими комбинационными схемами с меньшим, чем m+q, числом переменных в каждой.
Вопросам проектирования информационно-управляющих систем и, в том числе МПА, посвящены работы В.М.Глушкова, М.А.Гаврилова, А.Д. Закревского, В.Г. Лазарева, И.В. Прангишвили, В.Б. Смолова, В.В.Соловьева, В. В. и Вл. В. Сапожниковых, М.А.Баранова, Ю.Ф.Мухопада, а также E.McCluskey , E.F.Moore, C.H.Mealy, C.N.Liu, J.Hartmaniz и др.
Для сложных СРВ необходимо применять МПА с мегабитными ПЗУ, ПЛМ или ПЛИС большого объема. Широкая номенклатура БИС, ПЛМ, ПЛИС и микроконтроллеров приводит к тому, что выбор «оптимального» набора БИС для реализации МПА с минимальной сложностью, энергопотреблением и максимальной надежностью является наукоемкой задачей. J.Hartanis, А.Д.Закревский, М.А.Баранов, Е.И.Пупырев (1990г.) и др. предлагают два пути снижения сложности F1:
- минимизация булевых функций Ri ( дает эффект снижения затрат ~ 20% для простых автоматов и ~ 10% для автоматов средней сложности),
- переход к параллельно-последовательной декомпозиции через оптимизацию на графах (поиск эквивалентных подграфов, раскраски графов и др.), которые приводят к задаче полного перебора вариантов. Для сложных автоматов эта задача практически не разрешима без специальных эвристических правил, основанных на глубоком изучении специфики конкретных графов. Тем не менее эффект даже для средних автоматов не превосходит 30%.
Более эффективен метод декомпозиции граф-схем алгоритмов (ГСА) (Т.С.Бадмаева, Ю.Ф.Мухопад – 2003 г.). Этот метод позволяет снизить общее число (m+q) переменных для автоматов средней сложности с 17 до 11-12, однако для сложных автоматов имеются ограничения за счет необходимости введения дополнительных переменных при большом числе декомпозируемых частей ГСА.
Для СРВ, работающих в экстремальных условиях в составе особо ответственных систем или в пожаро- и взрывоопасных технологиях, недопустима выдача неправильной команды. Поэтому в МПА встраиваются системы динамического контроля, обеспечивающие фиксацию ошибки переходов a(t)→a(t+1) в процессе функционирования, а не при предстартовой тестовой проверке.
Вопросам контроля МПА посвящены работы В.Н.Балакина, В.В.Барашенкова, А.П.Горяшко, А.Е.Коваленко, Л.В.Дербунович, В.В.Сапожникова, С.А.Никищенкова, В.Г.Тоценко, Н.С.Щербакова, Ю.Ф.Мухопада, а также Д.Андерсона, Ш.Графа, М.Гесселя, Р.Кука , Г.Метце , и др.
Для динамического контроля правильности переходов используются коды Хемминга, коды с заданным расстоянием по Хеммингу, коды с дополнительным словом числа единиц в коде a(t), коды с фиксированным числом единиц и др.
Для контроля одиночных ошибок эффективны коды с фиксированным числом единиц, названные mCn (m произвольно расположенных единиц в n-разрядном коде). МПА с кодом mCn исследованы В.В.и Вл.В. Сапожниковыми. Код mCn требует создания весьма сложных схем контроля для n>4. При той же контролеспособности более прост в реализации модифицированный геометрический код (МГК). При использовании МГК исходный двоичный позиционный код (ДПК) преобразуется в код из трехразрядных групп с одной «1» - 001, 010, 100. Как mCn , так и МГК увеличивают разрядность a(t) в 2 - 2,5 раза по сравнению с ДПК, поэтому прямое применение этих методов проблематично для сложных и средней сложности автоматов.
Нерешенными остаются следующие задачи:
- снижение сложности комбинационных схем МПА для СРВ;
- повышение эффективности методов динамического контроля МПА для СРВ.
Для СРВ ограничиваются возможности вариантности структурной организации, т.к. изначально ориентируются на применение СБИС, многомикропроцессорных структур и « универсальных» микроконтроллеров. Необходимы такие структуры СРВ, которые могли бы дать возможность использования схем с наименьшим уровнем интеграции.
Во второй главе подробно рассмотрены автоматы Мура, Мили с памятью на регистрах и счетчиках.
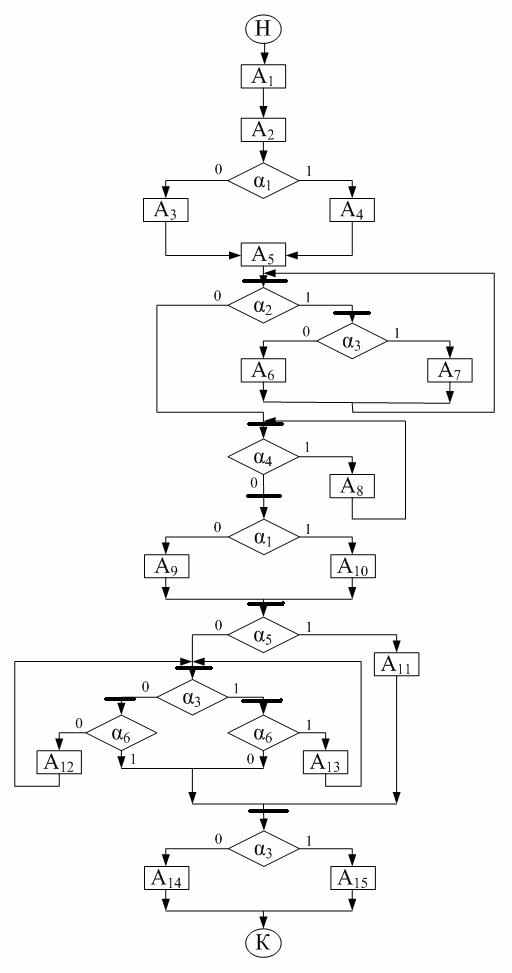
В работе предложена новая методика синтеза МПА, существо которой сводится к преобразованию заданной граф-схемы алгоритма (ГСА) (рис.1а) по следующим правилам:
1. Если в ГСА имеются непосредственные связи типа αj → αi (i ≠ j), то между ними ставится пустой оператор, т.е. такой, которому не соответствует выдача команды управления операционным устройством (рис.1 б).
2. Пустой оператор ставится также перед любым оператором αj , если к нему идет передача управления от нескольких других операторов.
Для синтеза МПА семантика Ai и αj несущественна, если ГСА составлена правильно.
Переход от модифицированной ГСА к графу переходов осуществляется по известной методике, однако после применения пунктов 1, 2 в получившемся графе не будет переходов a(t) → a(t+1), учитывающих значения нескольких логических условий, а останутся переходы по β или по αj или
 j ( j =1, 2, …, q ). Здесь β - безусловный переход. На рис.2 и 3 представлены графы переходов для исходной и модифицированной ГСА.
j ( j =1, 2, …, q ). Здесь β - безусловный переход. На рис.2 и 3 представлены графы переходов для исходной и модифицированной ГСА. Как видно из анализа графов, после модификации на любом переходе a(t) → a(t+1) можно определить номер логического условия αj или значение β =1 соответствующего состоянию a(t).
В этом случае аналитическая запись работы модифицированного автомата будет иметь вид (2):
a(t+1) = F1н (a(t), β, αj) ; A(t) = F2 (a(t)); J = F3 (a(t)) (2)
Здесь J - номер соответствующего условия αj при состоянии a(t) , F1н - новая система булевых функций, зависящая от кода a(t) и логических значений всего одной переменной α и безусловного перехода β. После определения номера J в виде кода {Z}выбор нужного значения αj может быть осуществлен типовым мультиплексором по адресу {Z}.

а) б)
Рис.1. Граф - схема алгоритма сложения чисел с плавающей запятой


Рис.2. Граф автомата Мура Рис.3. Граф нового автомата.
Введение М пустых операторов приводит к увеличению числа состояний в графе переходов, но величина m не меняется, если N+M ≤ 2m и увеличивается на «1», если условие не выполняется. N – число состояний автомата Мура. Пустому оператору соответствует пропуск такта, поэтому снижается быстродействие МПА в h раз. Здесь h = (N1 +M1) /N1, где M1 ,N1 -количество пустых и действующих операторов Аi на выделенном пути ГСА с наибольшим значением (N1 + M1). В реальных задачах h ≤ 1,25.
Структурная схема МПА для реализации уравнения (2) оригинальна (рис.4). Объем памяти для нового МПА равен Vн = m2m+1. Функциональная подсистема нового автомата остается такой же, как и в автомате Мура.
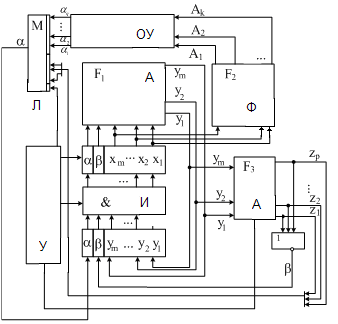
Рис.4. Структурная схема нового автомата
М – мультиплексор; β – признак безусловного перехода;
ОУ – объект управления (операционное устройство);
F3 - комбинационная схема определения адреса {Z} переменной αj
{α}. МПА, представленный на рис.4, может быть реализован без схемы F3, если выполнить следующее правило: перенумеруем все αj
{α } так, что каждому a(t) будет соответствовать αj, номер которого совпадает с номером состояния a(t), если ему не соответствует β =1.В этом случае мультиплексор следует проектировать как специальное устройство или необходимо произвести подачу α1,α2,… αq на соответствующие входы мультиплексора. В соответствии с графом переходов (рис.3) переменная α1 должна быть подана на 2-й и 7-й информационные входы мультиплексора, переменная α2 - на 5-й и 10-й, α3 - на 14-й и 20-й входы , …, α6 - на 11-й и 15-й входы. Если некоторому a(t) соответствует β =1, то выбирается α0 = 0.
В диссертации показано, что затраты элементов на схему F3 и мультиплексор не превосходят затрат на F1н.
Эффективность методики, без учета F3 и мультиплексора, оценивается отношением L=V/Vн. Оценка снижения объема ПЗУ приведена для простых, средних и сложных автоматов: m=4, q=8, L=128; m=5, q=12, L=2048; m=6, q=16, L=32768.
Преимущества данного варианта реализации нового автомата заключаются не только в том, что убирается схема F3, а выходы y1,y2,… ym подаются непосредственно на адресные входы мультиплексора, но также и в том, что нет необходимости формирования для несуществующей схемы F3 импульса синхронизации для А-подсистемы МПА.
Снижение сложности МПА при реализации А -подсистемы на ПЗУ, ПЛМ или ПЛИС столь существенно (в 2q - 1 раз), что приводит к значительному повышению надежности МПА за счет использования БИС с меньшей степенью интеграции, а также к снижению энергозатрат.
Для БИС ПЗУ энергопотребление составляет 0,4 мкВт/вентиль. Если один бит реализуется одним вентилем, то для сложных МПА энергопотребление снижается с 2,4 Вт до 0,3 мВт; устраняется эффект термоперегрева БИС, следовательно, повышается надежность МПА.
Учет затрат на схему F3 и мультиплексор несущественно снижает эффективность новой методики по критерию L.
Оценка степени упрощения ПЛИС по критерию L также является корректной, однако если сложная интегральная схема за счет программной настройки переводится в режим реализации более простой схемы, то заключение о снижении энергозатрат невозможно сделать, т.к. фирмы производители не раскрывают для пользователей детальную функциональную структуру ПЛИС. Тем не менее, как и для ПЛМ предложенная методика позволяет осуществлять реализацию на серийных моделях ПЛИС с меньшим уровнем интеграции.
В известных структурах МПА все логические условия {α} в А - подсистему подавались одновременно. За счет большого числа переменных (m+q) малоэффективны процедуры минимизации булевых функций. Для нового метода синтеза число переменных равно (m+1), и даже для сложных автоматов величина (m+1) не превосходит 8 при любом числе логических условий. Процедура минимизации булевых функций при числе переменных ≤ 8 становится эффективной и определяет реализуемость МПА на ПЛМ самой меньшей степени интеграции.
Новый автомат, соответствующий уравнениям (2) по принципу формирования выходных команд, по-прежнему соответствует классу автоматов Мура, однако обе модификации структурной организации нового автомата столь существенны, что можно рассматривать их как самостоятельный новый подкласс автоматов в отличие от известных вариантов структурной реализации автоматов Мура, Мили и Мили-Мура .
Новая структурная организация МПА дает возможность использования элементной базы с другими физическими принципами представления информации. В частности, для пневмоавтоматики и струйной техники, хотя и появилась возможность построения аналога ПЛМ за счет объемно-распределенной логики (Мухопад Ю.Ф., Комков А.З.), тем не менее степень интеграции матричных структур невелика. Для нового принципа организации МПА достигнутый уровень интеграции достаточен, что позволяет поставить задачу синтеза СРВ на элементах пневмоавтоматики и струйной техники, устойчивых даже к повышенному радиационному фону и другим неблагоприятным воздействиям.
Для СРВ, управляющих относительно медленными технологическими процессами, нет необходимости применения МПА с аппаратной реализацией. Однако при параллельной подаче q логических условий программы, реализующие МПА, сложны, т.к. необходимо выполнять многоиттерационные процедуры на 32-х разрядных микроконтроллерах. В известных методах моделирования требуется большое количество обращений к памяти, сравнения многоразрядных кодов при вычислении каждого разряда a(t+1), что приводит к низкому быстродействию.
В диссертации разработана методика моделирования МПА с новой структурной организацией на 8- разрядных микроконтроллерах, основанная на методе прямого считывания кода a(t+1) по коду αa(t). Такой способ эффективен для новой структуры МПА и обеспечивает высокое быстродействие модели МПА, несмотря на использование программного метода преобразования информации в микроконтроллерах. Более того, этот метод моделирования дает возможность применения упрощенных (логических) микроконтроллеров для программной реализации сложных МПА как с отдельно выделенным, так и с программно реализуемым мультиплексором.
Новая структурная организация МПА позволяет упростить функциональные схемы СРВ и реализацию МПА на микроконтроллерах. При использовании серийных БИС можно реализовать МПА на ПЛМ меньшей интеграции, что позволяет уменьшить энергопотребление и повысить надежность.
В третьей главе исследуются вопросы встроенного контроля МПА.
Для средних и сложных МПА известные методы динамического контроля практически неприменимы, т.к. разрядность кода состояний увеличивается более чем в два раза, и при большом числе логических переменных q усложняется реализация А-подсистемы. Совместно с новой методикой синтеза в диссертации предложено использование на выходе F1н кода МГК, а на входе F1н конкатенации α и модифицированного двоичного непозиционного кода состояний (МДК) (табл.1). В таблице символом m обозначена также разрядность ДПК и МДК.
Таблица 1
| № | ДПК | mCn | МГК | МДК | ||
| | m | 2C5 | 3C6 | m + 1 | ||
| | 000 | 00011 | 001 | 001 | 00 | 00 |
| | 001 | 00101 | 001 | 010 | 00 | 01 |
| | 010 | 01001 | 010 | 100 | 01 | 10 |
| | 011 | 10001 | 010 | 010 | 01 | 01 |
| | 100 | 10010 | 010 | 001 | 01 | 00 |
| | 101 | 10100 | 100 | 001 | 10 | 00 |
| | 110 | 11000 | 100 | 010 | 10 | 01 |
| | 111 | 01010 | 100 | 100 | 10 | 10 |
Переход от МГК к МДК осуществляется по правилу 001-00, 010-01, 100-10. Тогда в МДК в каждых двух разрядах не должна встречаться комбинация 11. Структура самоконтролируемого МПА с кодами МГК и МДК оригинальна, а схема контроля правильности кода a(t) тривиальна, т.к. сводится к установке элементов «И» на каждые два разряда кода {x}. При контроле МПА с кодом МДК разрядность кода a(t) увеличивается на 1 по сравнению с ДПК (табл.1). Схема контроля с МГК и МДК позволяет обнаруживать двукратные и большей кратности ошибки, если они возникают в разных группах МГК. Однако двойные ошибки в одной группе их трех разрядов не обнаруживаются.
В диссертации предложены методы контроля МПА при многократных ошибках, основанные на преобразовании МГК в код Грея в счетчике информационной подсистемы, а также на сравнении по частям тех переходов a(t)→a(t+1), которые определяются логическими условиями вне счетчика.
В диссертации предложена модификация известного метода резервирования А-подсистемы за счет использования двух идентичных схем F1 и одной
 , осуществляющей обратное преобразование a(t) = (αj a(t +1)). В этом случае схема принятия решения выполняет следующий алгоритм контроля:
, осуществляющей обратное преобразование a(t) = (αj a(t +1)). В этом случае схема принятия решения выполняет следующий алгоритм контроля:1 - если проверка на МГК дает отрицательный результат, как для F1 (1), так и для F1 (2) и выходные коды двух схем совпадают, то формируется сигнал – «МПА исправен», иначе п.2;
2 - по
восстанавливается a(t) от первого блока F1 и сравнивается с тем, который хранится в И - подсистеме. Если a(t)и ≡ a(t)в, то разрешается выдача Ai. Иначе п.4. Здесь индекс «и» обозначает a(t) в И – системе, а индекс «в» - восстановленное значение a(t);3 - осуществляется п.2 со вторым резервным блоком F1, иначе п.4;
4 – блокируется выдача команд Ai и формируется сигнал –«Автомат неисправен».
Схема МПА с резервированием приведена на рис.5.

Рис.5. Структурная схема МПА с резервированием по новой методике
В таблице 2 приведена оценка надежности для всех вариантов состояния А-подсистемы в МПА. Символом Н обозначена неисправность МПА, символом И – исправность, γ - вероятность отказа за один час работы одной комбинационной схемы. В столбце М отмечены варианты неисправной работы при тройном резервировании и мажоритарном способе принятия решения 2 из 3.
Таблица 2
-
№
F1(1)
F1(2)
Н
И
Вер. неиспр
М
0
0
0
0
1
γ3
1
1
0
0
1
1
γ2(1-γ)
1
2
0
1
0
1
γ2(1-γ)
1
3
0
1
1
1
4
1
0
0
1
γ2(1-γ)
1
5
1
0
1
1
6
1
1
0
1
7
1
1
1
1
При таком способе резервирования вероятность исправной работы МПА в течение часа P = (1-3γ2). Выражение для Р получено без учета слагаемых γ в степени выше 2. Если для БИС ПЗУ (ПЛМ) γ =10-4 – 10-5 отк/час, тогда P = 1 - 3(10-8 – 10-10).
В отличие от известных схем резервирования с мажоритарным выбором упрощается схема принятия решений, а также повышается уровень безотказности за счет обеспечения работоспособности при исправной схеме
и хотя бы одной схемы F1 с блокировкой выдачи команд в случае полной неисправности F1 (1) и F1 (2). Предложенный метод резервирования увеличивает объем оборудования А -подсистемы более чем в три раза с учетом схемы принятия решения, однако такое увеличение оправдано степенью повышения безотказности, тем более, что новый метод синтеза позволяет снизить сложность А –подсистемы в сотни и тысячи раз.
В работе произведена оценка степени повышения надежности МПА по новой структуре с резервированием А-подсистемы и обратным преобразователем информации для вариантов трехкратного резервирования.
В четвертой главе рассматриваются несколько систем управления технологическими процессами с дискретной реализацией операционного устройства на базе ПЗУ, регистров и элементов логики. Автор в практических задачах осуществлял совместно с соавторами разработку Ф, И, Л, А подсистем и самостоятельно разрабатывал ГСА, а также проводил абстрактный, структурный и функциональный синтез управляющей подсистемы СРВ.
Анализ известных ГСА для операций сложения и работы с порядками в системах с плавающей запятой, а также алгоритма приоритетных прерываний (В.Г. Кирий, С.И.Самарский) показал, что даже для простых микропрограмм, содержащих 20-25 микроопераций и 6-8 логических условий, эффект от перехода к новой структурной организации МПА обеспечивает снижение сложности А – подсистемы в 32-128 раз.
Технологический процесс статического и динамического контроля интегральной схемотехники имеет важнейшее значение при производстве микроэлектронных БИС.
Для технологического контроля БИС ПЗУ с ультрафиолетовым стиранием информации, имеющих возможность перепрограммирования, используется относительно сложный спецпроцессор (по изобретению Г.С.Скосырского, Ю.Ф.Мухопада). Спецпроцессор контроля ПЗУ с настройкой временных диаграмм был использован в отечественной промышленности производства БИС вместо параллельной работы двух ЭВМ с одним миллионом операций в секунду в зарубежных фирмах. Этот пример убедительно подтверждает эффективность специальной аппаратной реализации СРВ вместо традиционной ориентации на мощные параллельно работающие ЭВМ со специальным программным обеспечением и специализированными языками высокого уровня.
В спецпроцессоре используется также оригинальная схема формирования временных диаграмм (ФВД) с электрической перестройкой для каждого типа ПЗУ, используется пять перепрограммируемых ПЗУ, дешифратор, регистры, счетчики, блок принятия решения, блок индикации и др. (рис.6,рис.7).
Для управления спецпроцессором был использован МПА с канонической структурой автомата Мура. В связи реализацией национальной программы России в области нанотехнологии возрождается также отечественная микроэлектроника. Поэтому в диссертации произведен реинжиниринг подсистемы управления спецпроцессором контроля БИС ПЗУ.
В разработанной ГСА - 12 логических условий, а величина m= 6. Прямой переход к новой структуре МПА обеспечивает выигрыш в L=2048 раз, однако выделение циклических ветвей позволяет дополнительно снизить сложность А - подсистемы. На рис.8 показаны обозначенные ветви 0,1,…17; 25,26,…36 и 38,39,…42. Тогда при 45 вершинах в графе переходов функция ПЛМ сведется к формированию переходов только в остальные 14 вершин (5, 7, 9, 12, 17, 19, 21, 25, 29, 37, 38, 43, 44, 45) с формированием сигнала (+1) как отрицания функций ПЛМ.


Рис.6 Формирователь временных Рис.7. Структурная схема спецпроцессора
диаграмм для спецпроцессора контроля ПЗУ
контроля БИС ПЗУ
В диссертации приведены сравнения расчетов объемов памяти автомата, построенного по классической структуре и по предложенной новой модели МПА. Сложность МПА по новой структуре без счетчика можно оценить через m=6 и q=12, тогда для автомата Мура V=6·218, а для нового автомата Vн=6·27, эффект составит L=2048 раз.
Однако при реализации МПА на ПЛМ, в случае минимизации булевых функций, соответствующих табличному способу задания МПА из графа переходов, эффект окажется еще более значительным. Граф алгоритма управления спецпроцессором представлен на рис.8.

Рис.8. Граф переходов нового автомата с выделенным
счетчиком для управления процессом контроля ПЗУ
В машиностроительной промышленности нашли применение лазерные технологии для резки металлов, упрочнения шеек валов колесных пар железнодорожных вагонов и др. Одной из важнейших подсистем управления лазером является стабилизация мощности излучения, которая реализуется аналоговыми средствами, дискретные реализации таких систем неизвестны. Для адаптивной СРВ газового лазера (рис.9) с разрывным принципом управления (Н.Н.Пашков) разработан алгоритм, который представлен уравнениями (3):
 ,
,  . (3)
. (3)Для дискретной реализации уравнения (3) преобразуются к виду (4):
 , (4)
, (4)где U1 = d1 (y – c1x1), U2 = d2 (y – c2x2).
Здесь y – мощность излучения,
 x1- давление газовой среды, x2- ток разряда,
x1- давление газовой среды, x2- ток разряда, С1, С2, d1, d2 константы, U1 , U2 - исполнительные команды изменения х1, х2.
В диссертации разработано операционное устройство (рис.10) с использованием накапливающего сумматора, ПЗУ и нескольких регистров памяти. Алгоритмы управления лазером и операционным устройством представлены на рис.11 и 12. Оригинальность подхода заключается в организации табличного способа вычисления Z= Ciх, где Сi –константы, х – двоичное значение переменной с фиксированной запятой (разрядность ≤ 16), величина Z- параметр обратной связи. Адрес ПЗУ формируется как конкатенация кода х и кода номера константы, т.е. информации о константе, но не самого значения Сi. Изменение адресной части, соответствующей константе (i), реализуется счетчиком (i = 1 - 4). Такое решение обеспечивает при 16- разрядном представлении х и С с фиксированной запятой сокращение памяти табличного умножителя в 16384 раза. В разработанной ГСА m =6; q =12, тогда для МПА L = 2048. При выделении счетчика в качестве памяти А- подсистема дополнительно упрощается.

Рис.9. Блок-схема управления лазером

Рис. 10. Структурная схема операционного устройства системы управления лазером
Рг – регистр; РгА – регистр адреса ПЗУ; РгЛУ – регистр логических условий; ∑- накап-
ливающий сумматор; ГВМ – генератор временных меток; РгR – регистр результата;
РгИК – регистр исполнительных команд.


Рис 11. Алгоритм управления лазером Рис.12. Алгоритм управления операционным
устройством
В диссертации разработан оригинальный спецпроцессор для аппаратной реализации средств защиты информации, обеспечивающий одноцикловую (без итераций) реализацию рассеивания информации и сложения по модулю два (XOR) с секретным ключом за общее время в единицы микросекунд. Спецпроцессор можно использовать в СРВ не только для массовых потребителей (банки, коммерческие структуры), но и для уникальных, особо ответственных систем (мобильные роботы, транспортные средства, опасные технологические процессы с дистанционным управлением). В спецпроцессоре используются ПЗУ, регистры, элементы логики и комбинационные схемы
В настоящее время одной из важнейших проблем в системах передачи и обработки информации, а так же в системах дистанционного управления особо ответственными объектами и взрывоопасными технологиями, беспилотными летательными аппаратами и др., является задача защиты информации. Существующие программные системы защиты на основе алгоритмов Фейстеля, Блоуфиш и др. требуют сравнительно больших временных затрат даже на сверхбыстродействующих ЭВМ и поэтому не применимы в СРВ.
На первом этапе часть информационного сообщения разрядностью n интерпретируется не только как код для передачи, но и как двоичный адрес ПЗУ, в котором хранится набор секретных ключей (констант). Количество констант равно 2n. Константы распределены по адресам с использованием датчика случайных чисел. При n=16 количество секретных ключей > 64000, что гарантирует резистентность защиты и невозможность взлома с помощью перебора за реальное время даже на суперЭВМ, т.к. количество переборных вариантов равно 216N, где N -количество разных ключей к которым идет обращение при передаче полного текста закодированного сообщения.
На втором этапе преобразования в спецпроцессоре использован оригинальный алгоритм рассеивания информации, определенный тем, что секретный ключ представляет собой комбинацию из равного числа «0» и «1», распределенных по случайному закону в поле разрядности n (регистр В). Устанавливаются два регистра сдвига (С и D) с разрядностью n/2, которые заполняются по правилу Ci = Xi / bi =1, D=Xi / bi =0, где Хi-очередной бит сообщения (i =1- n) Затем образуется n-разрядная конкатенация cd и выполняется операция XOR. При каждом последующем шаге получения новой части сообщения в регистре ключа производится сдвиг.
В отечественной и зарубежной практике неизвестны ни программные, ни аппаратные способы криптозащиты с полным временем кодирования (и декодирования) за несколько микросекунд.
За счет специальной организации операционных устройств удалось упростить ГСА настолько, что автоматы управления СРВ для криптозащиты можно отнести к классу простых автоматов, т.к. в ГСА m=5, q=7. Сложность МПА по новой структуре без счетчика можно оценить через m=5 и q=7, тогда для автомата Мура V=5·212, а для нового автомата Vн=5·26, т.е. эффект составит L=64 раза.
Дискретная реализация спецпроцессоров с новой организацией МПА и процесса обработки информации позволяет создать фактически сверхбыстродействующие аппаратные средства защиты информации для технических систем реального времени.
В задачах, относящихся к классу наведении (подвижные работы, морские суда, летательные аппараты, средства беспилотного управления посадкой, специальные интеллектуальные системы и др.), величина сигнала ниже уровня шума, кроме того, сигнал нестационарен. Поэтому на входе таких СРВ используются специальные фильтры для обработки нестационарных радиосигналов или информации от оптических датчиков. Аналого-цифровая реализация фильтра предложена в изобретении Ю.Ф.Мухопада и Е.М.Кучиной. В диссертации предложена дискретная реализация адаптивного фильтра для вычисления средних значений зашумленного сигнала с помощью двух скользящих окон. Малое окно с числом измерений k вложено в большое окно – p, накапливающее средние значения от k измерений. Причем за счет повторений (2 или 3 раза) операции усреднения в большом окне с заменой хi на хср при / хi -хср / >3σ (хi -значение переменной, хср – среднее значение, σ - дисперсия) устраняются случайные «выбросы». Реализация операции Ciхi ( i =1 - n ) позволяет «компенсировать» эффект динамического запаздывания СРВ за счет забывания (Ci ≤ 1) старых значений. Адаптивные свойства фильтра определяются возможностью выбора значений n, m, Ci и нелинейной шкалы временных отсчетов по средней крутизне сигнала, определяемой после второго окна. Для соотношения сигнал/шум ≤ 1 выбирается значение k, p = 8,16. Структура фильтра содержит два блока стековой памяти, ПЗУ для операции Ci X , два накапливающих сумматора и элементы логики. Значения Z=CiX также как и для лазерного СРВ, определяются через ПЗУ с использованием номера константы.
МПА имеет характеристики m = 6, q = 12, величина L = 2048.
Использование СРВ для медтехники позволяет построить многофункциональные приборы с автоматизированной реализацией лечебных процедур. В диссертации проведено полное структурное и функциональное проектирование СРВ для обработки информации и управления прибором «Мультимед», предназначенного для лечения бронхолегочных и других простудных заболеваний на основе электромагнитного вакуумного и термотактильного воздействия на меридианы и биологически активные точки.
Все подсистемы Ф, И, А, Л построены на дискретных элементах средней интеграции, включая сумматор, стековую память с 12 регистрами, счетчики и элементы логики с управлением от МПА Число состояний МПА – N = 25 и логических условий -q=8. Величина L = 128. Прибор «Мультимед» оригинален, подана заявка на патентование в виде полезной модели.
Новая методика синтеза и новая структурная организация МПА могут использоваться не только в вычислительной технике для построения спецпроцессоров СРВ, но и при построении функциональных преобразователей интеллектуальных датчиков в АСУ, в специализированных интерфейсах и блоках ввода-вывода информации, а также при построении информационно-измерительных систем энергетики, специализированных систем высокого быстродействия для измерения параметров радиосигналов, характеристик переходных процессов в управлении электроприводами и др.
Методы динамического контроля и предложенная модификация контроля с резервированием могут быть применимы не только в МПА, но и для средств автоматизации широкого профиля.
Заключение
1. Произведен системный анализ структурной организации МПА с выделением Ф- функциональной, И- информационной, А- адресной, Л- логической и У- управляющей подсистем. По признакам количества разрядов (m) для представления состояний МПА и числу логических условий (q) автоматы разделены на четыре группы: – сверхпростые, простые, сложные и средней сложности. Анализ научных публикаций привел к выводу о том, что при использовании интегрального базиса (ПЗУ, ПЛМ и ПЛИС) наукоемкие технологии, связанные с декомпозицией, минимизацией булевых функций, и специальные способы кодирования, не дают существенного результата упрощения МПА для автоматов средней и повышенной сложности.
2. Предложена новая методика синтеза МПА, основанная на преобразовании граф-схем алгоритмов, позволяющая в реализации А-подсистемы использовать одномоментно не все q логических переменных, а подключать их последовательно в соответствии с текущим кодом состояния МПА. Структурная схема МПА, созданная по предложенной методике, оригинальна. Эффективное снижение объема ПЗУ для автоматов составляет 2q-1 раз.
3. Для систем реального времени, работающих в экстремальных условиях (температурные перепады, сильные электромагнитные поля, вибрация и др.), предложено несколько методов для встроенного динамического контроля:
- метод контроля, основанный на проверке наличия только одной единицы в модифицированном геометрическом коде на выходе ПЗУ и использовании модифицированного двоичного кода в адресной части ПЗУ. При этом число разрядов в модифицированном двоичном коде всего на один больше, чем в двоичном позиционном коде. Схема МПА с самоконтролем оригинальна;
- модификация известного метода резервирования, основанная не только на дублировании А -подсистемы, но и на введении обратного преобразователя αa(t+1) → a(t), что позволяет осуществить одновременно динамический контроль МПА и блокировку выдачи команд управления в случае неисправности или сбоя. Метод наиболее эффективен в комплексе с новой методикой синтеза МПА.
4. Разработан алгоритм моделирования новой структуры МПА на ПЭВМ с переложением на язык команд микроконтроллеров
5. Рассмотрено применение основных положений диссертационной работы в задаче управления технологическим процессом (стабилизация мощности излучения промышленного лазера) и в технических системах со встраиваемыми информационными технологиями (адаптивный цифровой фильтр, быстродействующие аппаратные средства криптографической защиты информации для СРВ). Структурные схемы аппаратной реализации криптозащиты с новым типом МПА оригинальны.
Цифровая реализация системы управления лазером с разрывным принципом регулирования предложена впервые. На средства криптографической защиты информации получено три патента на полезные модели.
На примере производственных технологических процессов и технических систем реального времени подтверждена эффективность предлагаемых методов синтеза МПА. Это позволяет рекомендовать результаты исследования к широкому внедрению в системы автоматизированного управления машиностроительной, химической, электронной, нефтегазовой промышленности и в задачи управления подвижными транспортными средствами (летательные аппараты, экранопланы, железнодорожный транспорт и др.), а также в медицинское приборостроение и в оборонные комплексы.
Список публикаций по теме диссертации
В изданиях, рекомендованных ВАК РФ
1. Мухопад, А.Ю Встроенный контроль в автоматах управления [Текст] / Ю.Ф. Мухопад, А.Ю. Мухопад, Т.С. Бадмаева // Вестник ИрГТУ. - 2006. - № 2. - С. 148-150.
2. Мухопад А.Ю. Динамический контроль автоматов [Текст] / А.Ю. Мухопад //
Изв. НГТУ. – Новосибирск: 2008. - № 3. – С .55 – 58.
3. Мухопад А.Ю. Метод синтеза сложных автоматов [Текст] / А.Ю. Мухопад, Ю.Ф. Мухопад // Изв. НГТУ. - Новосибирск: 2009. - вып. 1.- С. 212-214.
Патенты
4. Патент РФ на полезную модель № 63588. Самоконтролируемый автомат управления / Мухопад Ю.Ф., Мухопад А.Ю., Бадмаева Т.С. - Опубл. в бюл. № 15. - 2007.
5. Патент РФ на полезную модель № 82888., Микропрограммный автомат
/ Мухопад А.Ю., Мухопад Ю.Ф. - Опубл. в бюл. № 13. - 2009.
6. Патент РФ на полезную модель № 82974. Устройство криптографической защиты информации / Мухопад Ю.Ф., Мухопад А.Ю., Агафонов Т.Б. – Опубл. в бюл. № 13. -2009.
7. Патент РФ на полезную модель № 82889. Устройство криптографической защиты информации / Мухопад А.Ю., Мухопад Ю.Ф., Антошкин Б.Н. – Опубл. в бюл. № 13. -2009.
8. Патент РФ на полезную модель № 82890. Устройство криптографической защиты информации / Мухопад А.Ю., Мухопад Ю.Ф. – Опубл. в бюл. № 13. - 2009.
Статьи и доклады на научных конференциях
9. Мухопад А.Ю. Структурная организация программной модели сложных автоматов управления мехатроникой [Текст] / А.Ю. Мухопад // Тр. IV Международной конференции «Проблемы механики современных машин». - Улан - Удэ: ВСГТУ, Т. 3.- 2009. – С. 88-94.
10. Мухопад А.Ю. Структурная организация программной модели сложных автоматов систем реального времени [Текст] / А.Ю. Мухопад // Тр. XXII Международной конференции « Математические методы в технике и технологиях». - Псков: ППИ, Т. 2. – 2009. - С. 83-86.
11. Мухопад А.Ю. Синтез сложных автоматов управления мехатроникой [Текст] / А.Ю. Мухопад // Тр. VII Всероссийской научно-практической конференции студентов, аспирантов и молодых ученых «Молодежь и современные информационные технологии».- Томск: ТПУ . - 2009. - ч.2. - С. 70-71.
12. Мухопад А.Ю. Обеспечение надежности сложных автоматов управления мехатроникой [Текст] / А.Ю. Мухопад // Тр. Международной научной школы « Фундаментальные и прикладные проблемы надежности и диагностики машин и механизмов.- СПб: Научный совет РАН по проблемам машиноведения и технологических процессов, 2009. - С. 17-19.
13. Мухопад А.Ю., Методы повышения безотказности электронного комплекса самолетов [Текст] / А.Ю. Мухопад, Ю.Ф, Мухопад, М.П. Дунаев // Тр. Всероссийской конференции «Актуальные проблемы развития гражданской авиации России».- Иркутск, Москва: МГТУГА, 2009. - С. 78-83.
В других журналах и изданиях
14. Мухопад А.Ю. Структурная организация автоматов с контролем [Текст] / А.Ю. Мухопад // сб. Информационные системы контроля и управления на транспорте. Иркутск: ИрГУПС, 2005. - вып. 13. – С. 75-78.
15. Мухопад А.Ю. Динамический контроль микропрограммных автоматов [Текст] / А.Ю. Мухопад // Информационные системы контроля и управления в промышленности и на транспорте.- Иркутск: ИрГУПС, 2009 . - вып.16. - С.78-82.
16 Мухопад А.Ю. Моделирование сложных автоматов информационно-управляющих систем [Текст] / А.Ю. Мухопад / в кн. Ю.Ф.Мухопада « Теория дискретных устройств».- Иркутск: ИрГУПС, 2009 . - С. 146-142.
17. Mukhopad Yr. F., Mukhopad A.Yr. Microelectronic controlling of realtime complicated technical systems / Yr. F. Mukhopad, A.Yr. Mukhopad //International journal of applied and fundamental research (JSSN 1996-3955), 2009. - № 2. - p. 26 - 29.