
Обработка и передача измерительной информации
| Вид материала | Документы |
- Обработка и передача измерительной информации, 85.54kb.
- Обработка и передача измерительной информации, 182.05kb.
- Обработка и передача измерительной информации, 162.75kb.
- Обработка и передача измерительной информации, 273.12kb.
- 1. Информационные технологии. Структура информационного процесса. Сбор, обработка,, 1016.5kb.
- Обработка и передача измерительной информации, 166.25kb.
- Том числе компьютерного. Информационные процессы: хранение, передача и обработка информации., 1620.96kb.
- Обработка и передача измерительной информации, 201.84kb.
- Обработка и передача измерительной информации, 226.59kb.
- Билеты по информатике, 53.93kb.
Обработка и передача измерительной информации
МЕТОДОЛОГИЯ ОЦЕНКИ КОЭФФИЦИЕНТА МЕТРОЛОГИЧЕСКОЙ ГОТОВНОСТИ ЦИФРОВЫХ ИЗМЕРИТЕЛЬНЫХ ТЕХНОЛОГИЙ ГОРНОГО ПРОИЗВОДСТВА
Ткачева Т.А.
Московский государственный открытый университет
Москва, ул. П. Корчагина, 22. т. 683-6812
Только согласованное развитие систем «Эксплуатация горного оборудования (ГО)» и «Ремонтно-профилактическое обслуживание (РПО) ГО» может в настоящее время обеспечить эффективность горного производства. Эти системы могут считаться высоко технологичными, если они оснащены цифровыми измерительными технологиями (ЦИТ) (рис. 1).
Структура цифровых измерительных технологий горного производства
Рис. 1
С системной точки зрения ЦИТ характеризуются перспективностью развития и имеют важное значение при оценке результатов контроля, измерений и наблюдений всего горного производства. В ЦИТ задействовано много различного оборудования, в т. ч. средств измерений, контроля и наблюдений как наземных, так и спутниковых. Кроме того, здесь существенно влияние квалификационного уровня обслуживающего персонала, ремонтно-профилактического обслуживания, состояние поверочных систем и т.д. Коэффициент метрологической готовности ЦИТ, включающих «Эксплуатацию СК, СИ и СН» и «Ремонтно-профилактическое обслуживание и поверка СК, СИ и СН», как синтетический показатель функционирования большой системы «горное предприятие – горное оборудование – средства измерений – СИ, контроля - СК, наблюдений - СН и управления» определяется КМГ ЦИТ= ТрЦИТ /(ТрЦИТ +ТвЦИТ+ТПОВ СИ, СК и СН), где ТрЦИТ и ТвЦИТ – время работы, восстановления ЦИТ и поверки СИ, СК и СН, соответственно в процессах эксплуатации и ремонтно-профилактического обслуживания (РПО).
Важным для практики в приведенной модели КМГ ЦИТ является то, что в ней объединены основные технологии и системы «Эксплуатации, РПО и поверки» СИ, СК и СН.
Метролого-математические исследования изменчивости КМГ ЦИТ. Во времени и пространстве (а горное производство характеризуется значительной рассредоточенностью оборудования) ЦИТ под воздействием множества факторов существенно изменяются /1-3/. Будем оценивать даже самое незначительное изменение этого коэффициента. Обозначая его как ∆КМГ ЦИТ , считаем эту величину n-порядка малости, т.е. бесконечно малой величиной ∆КМГ ГО → ε (б.м.в.).
Д
 ля корректного описания всех изменений происходящих в ЦИТ, которые по техническому и метрологическому уровню должны быть сопоставимыми в процессах эксплуатации и РПО, например, по оснащенности современными средствами измерений, контроля и наблюдений. Тогда их изменчивость может быть представлена моделями вида
ля корректного описания всех изменений происходящих в ЦИТ, которые по техническому и метрологическому уровню должны быть сопоставимыми в процессах эксплуатации и РПО, например, по оснащенности современными средствами измерений, контроля и наблюдений. Тогда их изменчивость может быть представлена моделями вида ∆КМГ ЦИТ - Э → εЭ (1)
∆КМГ ЦИТ - РПО → εРПО.
Чувствительность к фиксации любой, самой незначительной изменчивости как для КМГ ЦИТ – Э так и для
КМГ ЦИТ – РПО в модели (1) должна быть одного порядка, а значит ∆КМГ ЦИТ – Э и ∆КМГ ЦИТ – РПО должны быть эквивалентными. На практике это означает согласованность управления как в процессе эксплуатации, так и РПО, включающего поверочные технологии и технику для всего комплекса ЦИТ /2,3/.
Об эквивалентности оценки изменчивости процессов эксплуатации и РПО технических метрологических средств, включенных в ЦИТ
Вначале дадим определение.
О п р е д е л е н и е. Если ∆КМГ ЦИТ – Э и ∆КМГ ЦИТ – РПО бесконечно малые величины, причем имеем модели, например, ∆КМГ ЦИТ - Э
lim ----------------- = 1, то величины ∆КМГ ЦИТ – Э и ∆КМГ ЦИТ – РПО называются эквивалентными, т.е.
∆КМГ ЦИТ - РПО
∆КМГ ЦИТ – Э ~ ∆КМГ ЦИТ – РПО.
В данной постановке задачи существует простой признак эквивалентности двух бесконечно малых величин [4]. Для примера, докажем эквивалентность ∆КМГ ЦИТ – Э ~ ∆КМГ ЦИТ – РПО.
Т е о р е м а оценки эквивалентности изменчивости ∆КМГ ЦИТ – Э и ∆КМГ ЦИТ – РПО. Для того, чтобы бесконечно малые величины ∆КМГ ЦИТ–Э и ∆КМГ ЦИТ–РПО были эквивалентными, необходимо и достаточно, чтобы их разность была бесконечно малой величиной более высокого порядка, чем ∆КГ ЦИТ – Э и ∆КГ ЦИТ – РПО.
Д о к а з а т е л ь с т в о.
Положим, ∆КМГ ЦИТ – Э – ∆КМГ ЦИТ – РПО=∆КМГ ЦИТ -1. Н е о б х о д и м о с т ь признака вытекает из того, что
∆КМГ ЦИТ – 1 ∆КМГ ЦИТ – Э – ∆КМГ ЦИТ – РПО ∆КМГ ЦИТ – РПО
lim ---------------- = lim ----------------------------------- = lim (1– ------------------) = 0,
∆КМГ ЦИТ – Э ∆КМГ ЦИТ – Э ∆КМГ ЦИТ – Э
∆КМГ ЦИТ – Э
ибо по условию lim ------------------ = 1.
∆КМГ ЦИТ – РПО
Точно также доказываем, что ∆КМГ ЦИТ – 1
lim -----------------= 0.
∆КМГ ЦИТ РПО
Докажем д о с т а т о ч н о с т ь признака. Пусть известно, что
∆КМГ ЦИТ – 1
lim -------------- = 0, т.е.
∆КМГ ЦИТ – Э
∆КМГ ЦИТ – Э – ∆КМГ ЦИТ – РПО
lim ----------------------------------- = 0. (3)
∆КМГ ЦИТ – Э
∆КМГ ЦИТ – 1 ∆КМГ ЦИТ – Э
Из (3) следует, что lim --------------- = 0, т.е. lim ------------------ = 1.
∆КМГ ЦИТ – Э ∆КМГ ЦИТ – РПО
Эти предельные равенства также получаются и том случае, если известно, что
∆КМГ ЦИТ – 1
lim -----------------= 0.
∆КМГ ЦИТ – РПО
И еще, погрешности метризации параметров надежности ЦИТ на горном производстве, которые имеют как абсолютные - ∆, так и относительные - γ значения. Оценки абсолютных погрешностей необходимы для определения отклонений фактических значений измеряемых физических величин (вес горной массы, затраты электроэнергии, расход газа и воды) от действительных в процессе горного производсива. В целом, они могут рассчитываться разными методами. Например, арифметическим и геометрическим суммированием, т.е. имеем γА (x,y,z,t)= γК(x,y,z,t) + γТУ(x,y,z,t). + γГОi(x,y,z,t), (4)
γГ (x,y,z,t)= (γ2К(x,y,z,t) + γ2ТУ(x,y,z,t) + γ2ГОi(x,y,z,t))1/2,. где γК(x,y,z,t), γТУ(x,y,z,t) и γГОi(x,y,z,t) – пространственно-временные оценки относительных погрешностей показателей ЦИТ, реализующихся на карьерах, технологических участках и i-го ГО.
Из выражений (4) получаем верхнюю (максимальную) и нижнюю (минимальную) оценки погрешностей, практическое использование которых зависит от решаемых информациологических и метрологических задач по аттестации и нормированию современных горных производств /2,3,4,6/.
Выводы
Гармоничное, экономически и социально значимое развитие техники и технологий эксплуатации горного оборудования на карьерах, разрезах, шахтах и рудниках обеспечивает экологическую безопасность горного производства только на основе цифровых измерительных технологий, включающих спутниковые и наземные наблюдения, контроль и измерения. И здесь появляются новые возможности теоретического обоснования и учета влияния бесконечно большого количество факторов на КГ ЦИТ, определяющего степень контролируемости, измеряемости и наблюдаемости за всей изменчивостью горно-технологических процессов.
1. В соответствии с [5] поставлена задача обеспечения метрологической надежности и активизации ЦИТ процессов на горных предприятиях.
2. Отмечена необходимость введения доказательности изменчивости Кг ЦИТ и выявления проблем при гармоничном развитии наземных и спутниковых измерительных систем и технологий горного производства.
3. Впервые сформулирована и доказана теорема по Кг ЦИТ, синтезирующего и отражающего всю изменчивость горно-технологических процессов на любом месторождении полезных ископаемых. А это позволяет вести нормативное планирование коэффициента готовности и собственно самого горного оборудования, оперативно вести учет влияющих факторов и получить полный контроль на предприятии.
Литература
1. Ильин В.А. Телеуправление и телеизмерение. М.: Энергоиздат. 1982.
2. Ткачева Т.А. О теории и технологии поверки горно-добывающих производственных процессов (ГД ПП). М.: Труды РНТО РЭС им. А.С. Попова. Выпуск LXI. 2006. С.207-210.
3. Ткачева Т.А. Информациологическая точность интеллектуализированного мониторинга управления надежностью карьерного оборудования. М.: Труды РНТО РЭС им. А.С. Попова. Выпуск LXI. 2006. С. 210-211.
4. Бермант А.Ф., Араманович Н.Г. Краткий курс математического анализа. М.: Наука. – 1967.
5. Совместная декларация по метрологии. Париж. – 23 января 2006.
6. Юзвишин И.И. Основы информациологии. М.: Международное изд-во «Информациология», Высшая школа. – 2000.
METHODOLOGIE OF THE APPRAISAL OF THE COEFFICIENT THE METROLOGICAL READINESS OF THE DIGITALS MEASURINGS TECHNOLOGIES IN MOUNTAIN INDUSTRIAL
Tkacheva Т.
The Moscow state open university
In the paper deals about problems and decisions of the activаte of the metrological ensuring of the digital technologies of the mountain industrial. Is significant the necessity of the utilization of the facts of the believe, and also sputniks and grounds measures and control with extended precision. Is formulate and prove the theorem on the news direction of the changeable КR of the mining equipment.
РАСЧЕТ КОЭФФИЦИЕНТОВ ЦИФРОВЫХ ФИЛЬТРОВ ЧЕТЫРЕХКАНАЛЬНОГО ЦИФРОВОГО ПРИЕМНИКА mf-01 И МОДЕЛИРОВАНИЕ ПРОХОЖДЕНИЯ СИГНАЛА ЧЕРЕЗ ФИЛЬТР
Богатов А.В.1, Макаров Д.Е.1, Чесалов В.П.2
1Московский институт радиотехники, электроники и автоматики (ТУ)
2ОАО «Концерн радиостроения «Вега»
ВВЕДЕНИЕ
Одним из перспективных направлений исследований космического пространства является исследование планеты Марс и ее спутников. Европейское и американское космические агентства давно уже реализуют программы по изучению Красной планеты. В последнее время интерес к Марсу и его спутникам стал проявлять и Китай. Среди российских проектов следует выделить проект «Фобос-Грунт». Задача этого проекта – доставка образцов грунта с Фобоса на Землю. Исследование этих образцов в лабораториях даст уникальную возможность решить вопрос о происхождении и эволюции спутников Марса, самой планеты и Солнечной системы в целом. В ходе экспедиции космический аппарат должен совершить посадку на Фобос, произвести забор грунта и отправить образцы на Землю. Доставка образцов на Землю осуществляется с помощью взлетной ракеты. При этом на поверхности Фобоса останется посадочный модуль, который в течение года будет производить сбор потребной информации.
Особое значение для реализации названного проекта имеет навигационное оборудование для космичесского аппарата, в частности, доплеровский измеритель скорости и дальности.
Доплеровский измеритель скорости и дальности предназначен для определения параметров движения аппарата на заключительном этапе полета – посадке, с целью обеспечения движения аппарата в соответствии с расчетной траекторией. В связи с тем, что посадка будет производиться в полностью автономном режиме, необходимо иметь полную информацию о местоположении аппарата и параметрах его движения. Именно эту задачу и призван решить доплеровский измеритель скорости и дальности. Основным функциональным эллементом измерителя скорости и дальности является устройство цифровой обработки сигналов, отраженных от поверхности, с целью определения доплеровского сдвига частоты и фазового запаздывания, на основе которых и определяют параметры полета [1].
МЕТОДИКА РАСЧЕТА ФИЛЬТРОВ
Одним из элементов устройства цифровой обработки сигналов является цифровой приемник. Его задача – преобразовать в квадратуре при помощи цифрового гетеродина сигналы с выхода АЦП и проредить полученные отсчеты с помощью фильтров-дециматоров до необходимой частоты. С технической точки зрения MF-01 [2, 3] представляет собой четырёхканальный цифровой приемник, применяемый для построения приёмных трактов радиотехнических систем. Данный цифровой приемник позволяет обрабатывать действительный аналоговый сигнал, действительный 16-битный цифровой сигнал, комплексный аналоговый сигнал, комплексный 16-битный цифровой сигнал, комплексный 8-битный сигнал. Скорость отсчетов входного сигнала при этом может достигать 100 Мегавыборок в секунду. Приемник содержит двухкаскадный гетеродин, фильтр-дециматор с фиксированными коэффициентами в каждом канале, два программируемых фильтра-дециматора 64-ого порядка в каждом канале. Таким образом, цифровой приемник MF-01 представляет собой мощное и гибкое средства построения входного тракта.
На этапе проектирования работа проводилась с демонстрационной платой MF-01EM, являвляющейся полным аналогом MF-01. Данная плата предназначена для моделирования и разработки систем цифровой обработки сигналов в лабораторных условиях. Плата рассчитана на автономную работу с PC по стандартным внешним интерфейсам USB 2.0. Также к плате прилагается программа MFStudio, позволяющая моделировать поведение платы на компьютере, перед загрузкой данных во флэш память на плате. Таким образом, прежде чем работать с самой платой, есть возможность смоделировать ее работу на компьютере, что сильно ускоряет и упрощает процесс разработки.
Удобный инструмент для проектирования фильтров предоставляет программный продукт Matlab компании MathWorks [4]. В комплект поставки входит пакет Filter Design ToolBox, являющийся одним из наиболее удобных современных инструментов проектирования фильтров. И хотя на рынке присутствуют другие продукты, решающие сходные задачи, Matlab является наиболее оптимальным решением. Во-первых, данный продукт является полноценной средой разработки, в отличии от других математических продуктов (например MathCad), а во-вторых, Matlab является весьма гибким инструментом, позволяющим решать большое количество задач.
Расчет коэффициентов производился следующим образом.
С помощью пакета Filter Design ToolBox проектировался КИХ-фильтр, удовлетворяющий условиям задачи. Для этого были определены полосы пропускания и задержки, глубина подавления и другие параметры. Результат проектирования – АЧХ фильтра – можно просмотреть, выбрав соответствующую вкладку данной программы. Также можно просмотреть коэффициенты полученного фильтра. Имеет смысл так подбирать параметры, чтобы первые коэффициенты имели как можно большие значения. Это обусловлено тем, что в случае малых значений погрешность при переводе коэффициентов в формат, используемый MF-01, будет достаточно большой, и, в результате АЧХ фильтра приемника может оказаться отличной от идеального варианта, полученного в среде Matlab. Чтобы работать с коэффициентами, необходимо экспортировать их в рабочее пространство (workspace). Следующий этап – перевод их в нужный формат, для чего каждый коэффициент умножается на 2 в15-ой степени, то есть на 32768 (поскольку входные интерфейсы имеют разрядность 16 бит). Поскольку фильтр симметричный, следует отбросить вторую половину коэффициентов. Данное преобразование выполняет следующая программа:
output_file='D:\MatlabWork\coef2.dat';
out_file=fopen(output_file,'wb');
size_of_koef_array=size(Num); % размер массива коэффициетов, полученных из FDAToolbox
size_of_koef_array=ceil(size_of_koef_array(2)/2);
for i=1:1:size_of_koef_array % перебор массива
arr(i)=round(32768*Num(i)); % перевод коэффициентов нужный формат и их округление
h=int2str(arr(i)); % перевод числа в строку
n='\r\n';
fwrite(out_file,h); % запись значения в файл
fprintf(out_file,n);
i=i+1;
end
disp('Коэффициенты получены.');
fclose(out_file);
В результате файл coef2.dat в директории D:\MatlabWork\ будет содержать искомые коэффициенты.
Таким образом можно получить коэффициенты фильтра, обеспечивающие необходимую форму его АЧХ. В данном случае фильтр должен был обеспечить прохождения сигнала с частотой до 10 кГц с минимальным подавлением (не более 3 дБ), а с частотой до 20 кГц с подавлением 22 – 23 дБ. Более высокие частоты должны быть подавлены не менее, чем на 50 дБ. С помощью программы MFStudio можно просмотреть результат – АЧХ спроектированного фильтра (рис. 1).
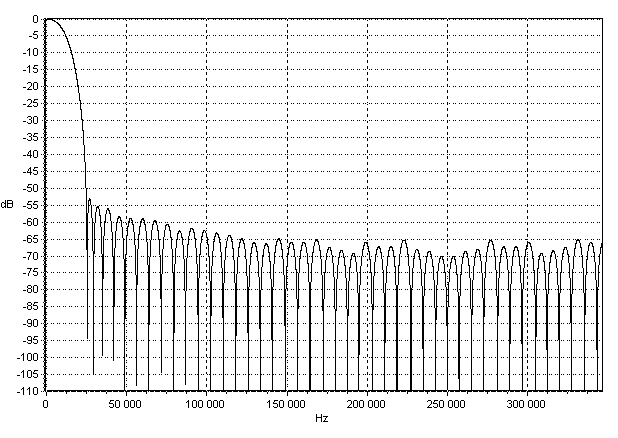
Рис. 1. АЧХ фильтра
Можно также посмотреть результирующую АЧХ с учетом предыдущих каскадов, показанную на рис. 2. Полученный результат, как видно из рисунка, полностью отвечает представленным требованиям.
Следующий этап – моделирование прохождения сигнала через фильтр. Моделирование можно осуществить также с помощью программы MFStudio. На вкладке «Модель» есть необходимые инструменты для этого. С помощью переключателя Input Type Signal можно выбрать тип входного сигнала. Программа умеет моделировать прохождение синусоидального сигнала через заданный фильтр, а также воздействие на него белого шума. С помощью соответствующих полей ввода можно задать параметры воздействия. Однако наиболее гибкий вариант – задание файла со значениями входного сигнала. В данном случае входное воздействие задается значениями отсчетов, представленных в обычном текстовом файле. Таким образом, можно смоделировать практически любое входное воздействие. Для создания файла с отсчетами удобно составить программу, позволяющую автоматизировать данный процесс.
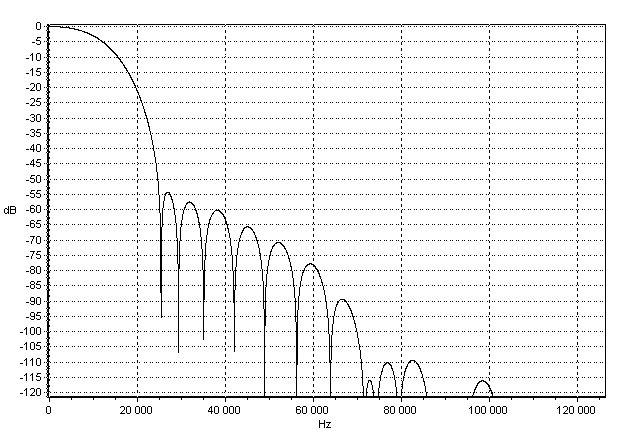
Рис. 2. Результирующая АЧХ
В качестве примера может быть программа, написанная на С++ (в среде Borland C++ Builder 6). Данная программа позволяет создавать файл, представляющий набор значений из комбинации двух гармонических сигналов и белого шума. Ее алгоритм весьма прост. Он представлен на рис. 3.
Заполнение массивов сигнала можно выполнить с помощью обычного оператора цикла – for. Если функция гармоническая, то следует определить количество отсчетов на период, для этого необходимо разделить общее число отсчетов на частоту.
В случае непериодической функции следует нормировать ее по времени.
Необходимо отметить еще один важный момент – числа, идущие под нечетными номерами, соответствуют реальным отсчетам, а под четными – мнимым.
Простейшая реализация такого алгоритма:
#include
….. // задание параметров
int counts=floor(size/freq1); // определение числа отсчетов на период
for (int i=0;i
signal[i]=floor(ampl*cos(2*M_PI*i/counts))+floor(ampl*cos(2*M_PI*i/counts));
ofstream fout;
AnsiString f_n=Имя выходного файла;
fout.open(f_n.c_str(), ios_base::out); // открытие файла для записи
for (int i=0;i
fout << signal1[i] << endl; // запись значений
fout.close(); // закрытие файла
Программа создаст файл, содержащий значения отсчетов сигнала.
В результате обработки данного файла программой MFStudio была получена АЧХ сигнала на выходе фильтра.
На рис. 4 показана зависимость амплитуды сигнала, представляющего сумму двух гармонических сигналов и белого шума, от его частоты на выходе фильтра. Здесь представлены два сигнала, с частотами 2200 и 6200 кГц и амплитудами 1000 и 800 (амплитуды относительные). Отношение сигнал/шум равно 12 дБ.
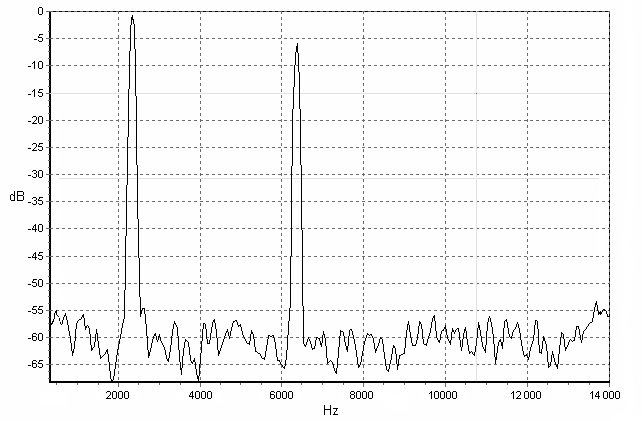
Рис. 3. Прохождение сигнала через фильтр
На основе приведенного графика видно, что фильтр выполняет поставленную выше задачу. Сигналы прошли, хорошо различимы на фоне шума.
ВЫВОДЫ
- Разработанный способ позволяет сравнительно просто и быстро производить расчет фильтров цифрового приемника MF-01, а также проводить моделирование прохождения сигнала через этот фильтр.
- Разработана программа задающие входное воздействие для модели. Выше изложен принцип ее работы.
- Использование модели позволяет упростить и ускорить процесс проектирования.
Литература
- Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. Пер. с англ. – М.: Мир, 1978. – 848 с.
- Техническое описание СБИС четырехканального цифрового приемника 1288XK1T. – М.: НПЦ ЭЛВИС, 2006. – 52 с.
- Техническое описание «Демонстрационная плата СБИС 1288ХК1Т (MF01) MF-01EM». – М.: НПЦ ЭЛВИС, 2006. – 26 с.
- Поршнев С.В. MATLAB 7. Основы работы и программирования. Учебник. –М.: Бином. Лаборатория знаний, 2006. – 598 с.
- Копик А. Марс в области наших интересов, или на Фобос за грунтом в 2009-м – М.: Новости космонавтики, 2004. - С. 7.
Цифровая обработка сигналов и ее применение
Digital signal processing and its applications