
Разработка алгоритмов поиска и обследования искусственных протяженных объектов с помощью автономного необитаемого подводного аппарата
| Вид материала | Задача |
- Д. Ф. Устинова выпускная квалификационная работа Милушкова Виталия Игоревича Фамилия,, 1187.36kb.
- 4. литература обозначения, 123.3kb.
- Разработка математических моделей и алгоритмов принятия решений по кредитованию предприятий, 286.47kb.
- 2 семестр 2 курса, 56.57kb.
- Темы для диссертаций для ага (Ширяева О. И.). 2012г, 22.07kb.
- 3. Лекция: Методы поиска решений, 336.6kb.
- Анализ результатов обследования технического состояния резервуаров, 44.28kb.
- Программа по дисциплине математическая логика и теория алгоритмов, 47.77kb.
- 5 Историко-культурное наследие, 205.36kb.
- «Понятие об алгоритме. Примеры алгоритмов. Свойства алгоритмов. Типы алгоритмов, построение, 84.9kb.
На правах рукописи
Павин Александр Михайлович
РАЗРАБОТКА АЛГОРИТМОВ ПОИСКА И ОБСЛЕДОВАНИЯ ИСКУССТВЕННЫХ ПРОТЯЖЕННЫХ ОБЪЕКТОВ С ПОМОЩЬЮ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА
Специальность: 05.13.18 – Математическое моделирование, численные методы и комплексы программ
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук

Владивосток – 2010
Работа выполнена в лаборатории систем управления Института проблем морских технологий Дальневосточного отделения РАН
Научный руководитель: кандидат технических наук
Инзарцев Александр Вячеславович
Официальные оппоненты: доктор физико-математических наук, профессор
Ащепков Леонид Тимофеевич
кандидат технических наук, доцент
Москаленко Юрий Сергеевич
Ведущая организация: Институт динамики систем и теории управления Сибирского отделения РАН,
(г. Иркутск)
Защита состоится «25» июня 2010 г. в 12 часов на заседании диссертационного совета Д 005.007.01 в Институте автоматики и процессов управления ДВО РАН по адресу: 690041, г. Владивосток, ул. Радио, 5.
С диссертацией можно ознакомиться в библиотеке Института автоматики и процессов управления ДВО РАН
Автореферат разослан «21» мая 2010 года
Ученый секретарь
д
 иссертационного совета Д 005.007.01,
иссертационного совета Д 005.007.01,к
 .т.н. А.В. Лебедев
.т.н. А.В. ЛебедевОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы. Задача периодического обследования (инспекции) подводных коммуникаций с течением времени становится всё более острой, что связано с возрастающим количеством коммуникационных линий и их длиной. Примером может служить инспекция подводных трубопроводов и кабелей (далее искусственных протяженных объектов) на предмет повреждений или наличия посторонних предметов. Задача инспекции включает в себя: поиск протяженного объекта, его отслеживание (с ведением фото-документирования), акустическую съемку окрестности объекта и контроль состояния параметров окружающей среды (для трубопроводов). Обычно для этих целей применяют надводные суда, водолазов, буксируемые и телеуправляемые подводные аппараты, однако возможность использования этих средств часто ограничена и ведет к увеличению стоимости инспекционных работ. Перспективным решением задачи инспекции подводных коммуникационных линий большой протяженности является применение автономного необитаемого подводного аппараты (АНПА) в качестве «интеллектуального носителя» обзорно-поисковой аппаратуры регистрирующей состояние искусственного протяженного объекта (ИПО). Благодаря возможности длительного пребывания под водой, дальности действия, маневренности и относительно низкой стоимости работ, применение АНПА позволяет в сжатые сроки произвести инспекцию всей трассы залегания подводных коммуникаций.
Первые разработки, касающиеся возможности применения АНПА для отслеживания ИПО относятся к 80-90 годам прошлого столетия ( Агеев М.Д., Kato N., Asakawa K. и др.). На данный момент можно говорить о хорошей проработанности задачи идентификации подводных кабелей на фотоизображениях (Щербатюк А.Ф., Желтов С.Ю., Ito Y., Ura T., Conte G., Ortiz A., Oliver G. и др.). Достаточно давно ведутся исследования по обнаружению металлосодержащих ИПО на основе электромагнитной информации (Кукарских А.К., Kojima J., Asakawa K. и др.). На сегодняшний день в печати встречается информация о трех аппаратах, способных проводить инспекцию протяженных объектов: японский Aqua Explorer 2000; французский Alistar 3000 и российский MT-98. Первый из них предназначен для отслеживания подводных кабелей, содержащих запитанные токонесущие проводники. Принцип действия сенсорных устройств этого АНПА не позволяет обнаруживать трубопроводы, информационные (не запитанные) кабели и кабели с обрывом. Область назначения второго аппарата – инспекция подводных трубопроводов (первые упоминания об испытаниях содержатся в работах 2007 года). Известно, что аппарат оснащен телевизионной, эхолокационной и электромагнитной системами, однако о методах идентификации ИПО и управлении АНПА информации крайне мало. В России разработки в данной области ведутся в Институте проблем морских технологий (ИПМТ ДВО РАН) [1,2]. Практический опыт применения подводных аппаратов показывает, что имеется ряд трудностей, связанных с автоматической инспекцией ИПО. Нерешенной остается задача автоматического обнаружения тонких протяженных объектов (кабелей) на снимках гидролокатора бокового обзора. Существует необходимость в повышении точности и надежности обнаружения металлосодержащих протяженных объектов по данным электромагнитных сенсорных устройств и крупногабаритных ИПО (трубопроводов, траншей) по данным многолучевой эхолокационной системы. Кроме того, в случае наличия нескольких разнородных систем обнаружения возникают вопросы совместной обработки данных и формирования управления АНПА в условиях неточной и постоянно изменяющейся информации. Таким образом, задача разработки алгоритмов поиска и обследования ИПО с помощью АНПА является актуальной.
Цель и основные задачи работы. Целью диссертационной работы является исследование и разработка алгоритмов поиска и обследования искусственных подводных протяженных объектов средствами автономного необитаемого подводного аппарата. Для достижения указанной цели в работе определены следующие задачи:
- Разработка алгоритмов идентификации протяженных объектов с использованием дальнодействующих и близкодействующих средств обнаружения.
- Разработка алгоритмов интегральной обработки данных от сенсорных устройств АНПА различной природы для вычисления параметров инспектируемого ИПО.
- Разработка алгоритмов управления подводным аппаратом для осуществления инспекции протяженных объектов.
- Реализация и оценка характеристик предлагаемых решений в опытных и экспериментальных образцах АНПА.
Методы исследования базируются на применении аппарата теории распознавания образов, принятия решений, управления и математической статистики.
Научная новизна работы заключается в следующем:
- впервые предложен алгоритм распознавания тонких протяженных объектов (кабелей) по данным гидролокатора бокового обзора, работающий в режиме реального времени на борту АНПА;
- разработан новый алгоритм идентификации крупногабаритных ИПО (трубопроводы, траншеи) по данным многолучевой эхолокационной системы, позволяющий обнаруживать объект инспекции не зависимо от направления движения АНПА по отношению к объекту;
- получены аналитические выражения, позволяющие использовать для обнаружения металлосодержащих ИПО электромагнитный искатель АНПА с неортогональной антенной системой;
- разработан алгоритм интегральной обработки информации, использующий текущие и накопленные данные разнородных сенсорных устройств АНПА для вычисления параметров ИПО;
- предложен новый алгоритм управления АНПА, позволяющий производить инспекцию подводных коммуникаций в автономном режиме с использованием всех имеющихся на борту систем распознавания ИПО.
На защиту выносятся следующие положения:
- алгоритмы распознавания протяженных объектов;
- алгоритм интегральной обработки информации от разнородных сенсорных устройств АНПА для вычисления параметров ИПО;
- алгоритм управления АНПА во время инспекции ИПО;
- реализация разработанных алгоритмов на борту АНПА.
Практическая ценность работы заключается в разработке и реализации на борту АНПА алгоритмов распознавания, интегральной оценки данных и управления. Использование предлагаемых алгоритмов позволяет решить задачу инспекции подводных протяженных объектов средствами АНПА. Полученные в работе результаты основаны на опыте создания в ИПМТ ДВО РАН обследовательских и обзорно-поисковых аппаратов. Работа выполнялась в рамках НИР «Разработка технологии создания интеллектуальных подводных роботов на основе реконфигурируемых системных архитектур и высокоточных методов навигации и управления» № гос. регистрации 01.2006 06513», Гособоронзаказа, а также при поддержке грантов РФФИ и ДВО РАН: №06-08-07118-з, №07-08-00596-а, №08-08-08043-з, №09-08-08016-з, №06-11-04-03-002, №06-111-А-01-010, №09-II-СО-3-001, №09-I-ОЭММПУ-08, №09-III-А-01-006.
Достоверность исследований обеспечивается обоснованием выбора применяемых методов распознавания, интегральной оценки данных и управления АНПА, на основе проверенных результатов теоретических и экспериментальных исследований. Правильность выбранных подходов подтверждается результатами моделирования, морскими испытаниями и опытной эксплуатацией подводных аппаратов.
Реализация результатов работы. Алгоритмы идентификации протяженных объектов, интегральной обработки данных и управления АНПА были реализованы, прошли испытания и опытную эксплуатацию в составе систем управления аппаратов МТ-98 и TSL.
Апробация результатов работы. Основные научные и практические результаты работы были представлены на 8 конференциях, из которых 3 зарубежных и 5 российских:
- Зарубежные конференции и симпозиумы: 1) Шестой международный симпозиум по подводным технологиям, г. Уси, Китай, 2009 г., [2]. 2) Международная конференция «Океаны’08», г. Кобе, Япония, 2008 г., [8,12]. 3) Международная конференция «Океаны’06», г. Бостон, США, 2006 г., [6,15] (доклад [6] был удостоен III места на конкурсе аспирантских работ).
- Российские конференции и школы-семинары: 1) Третья всероссийская научно-техническая конференция «Технические проблемы освоения мирового океана», Владивосток, 2009 г., [3]. 2) VIII школа-семинар молодых ученых «Математическое моделирование и информационные технологии», Иркутск, 2006 г., [5]. 3) Международная научно-техническая конференция «Технические проблемы освоения мирового океана», Владивосток, 2007 г., [11]. 4) Международная научно-техническая конференция «Технические проблемы освоения мирового океана», Владивосток, 2005 г., [14]. 5) Международная конференция по подводным технологиям, С-Петербург, 2009 г., [17].
Публикация результатов работы. По результатам исследований было опубликовано 17 печатных работ (3 работы размещены в журналах из списка, рекомендованного ВАК [4,9,16]). Большинство результатов исследований легли в основу главы “AUV Application for Inspection of Underwater Communications” книги [1].
Структура и объем диссертации. Диссертация состоит из введения, списка условных обозначений, пяти глав, заключения, списка литературы и приложения. Основное содержание излагается на 160 страницах, в том числе 54 иллюстрации и 5 таблиц. Объем приложений составляет 19 страниц и включает 12 иллюстраций и 3 таблицы. Список литературы содержит 114 наименований. Последние разделы глав 2-5 и приложение содержат результаты моделирования, натурных экспериментов, постобработки реальных данных и результаты опытной эксплуатации АНПА.
КРАТКОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении обосновывается актуальность направления исследований, формируется цель и ставятся задачи, характеризуется научная новизна и практическая ценность работы.
В главе 1 приводится обзор существующих методов инспекции искусственных протяжных объектов, дается классификация и характеристики ИПО, описываются цели и задачи инспекции, а также существующие средства обнаружения протяженных объектов.
По своему назначению подводные коммуникации делятся на трубопроводы, информационные или силовые линии связи (которые включают запитанные и не запитанные кабели, а также оптоволоконные линии) и траншеи (предназначенные для прокладки трубопроводов и кабелей). Указанные объекты обладают различными геометрическими, оптическими и электромагнитными характеристиками, а также характеризуются разными способами прокладки (лежащие на поверхности, полностью или частично зарытые). В зависимости от назначения ИПО существуют общие и специфические цели и задачи инспекции. К общим целям относятся: уточнение координат объекта инспекции; обнаружение повреждений и посторонних объектов, как на самом объекте, так и в его окрестности. В дополнение для кабелей и трубопроводов необходимо обнаружение подвижек, провисов и промоин объекта; а также регистрация утечек транспортируемых веществ (только для трубопроводов). Можно выделить следующие задачи, которые должен решать АНПА в процессе инспекции: 1) поиск протяженного объекта; 2) отслеживание ИПО с ведением фото-документирования; 3) контроль состояния параметров окружающей среды на всем протяжении залегания и обследование опасных мест (для трубопроводов); 4) съемка окрестности ИПО. Анализ существующих решений задачи инспекции ИПО показывает, что необходима разработка: 1) алгоритмов обнаружения тонких протяженных объектов на акустических снимках гидролокатора бокового обзора; 2) алгоритмов идентификации крупногабаритных ИПО по данным дальномерной эхолокационной информации АНПА; 3) алгоритма определения параметров (координат) инспектируемого объекта на основе интегральной обработки данных от разных систем распознавания АНПА, поскольку ни одно средство распознавания ИПО не дает гарантированный результат; 4) алгоритмов управления АНПА, для достижения всех целей инспекции протяженного объекта. Кроме того, необходимо усовершенствование метода распознавания металлосодержащих протяженных объектов по данным электромагнитного искателя для повышения точности и надежности детектирования объекта инспекции. Решению перечисленных задач посвящены следующие главы диссертации.
В главе 2 решается задача применения гидролокатора бокового обзора (ГБО) в качестве средства идентификации подводных протяженных объектов (кабелей и трубопроводов). Перспективность использования ГБО заключается в его высокой разрешающей способности и большом радиусе действия.
Разработанный алгоритм распознавания протяженных объектов состоит из следующих основных этапов: предварительная обработка данных (фильтрация); построение акустической карты рельефа дна; выделение границ протяженного объекта и детектирование протяженного объекта на фоне дна. Гидроакустический снимок всегда содержит шумы, которые связаны с погрешностью измерения амплитуды акустической волны. Анализ изображений ГБО показал, что для подавления шумов необходимо использовать фильтр, который не меняет значения точек на границе объектов (даже очень тонких), но избавляет изображение от локальных экстремумов. Распознавание протяженного объекта производится по акустической карте рельефа местности (рис. 1-а) с привязкой к абсолютным координатам. Карта генерируется путем расчета пространственных координат пикселей акустического изображения (с учетом счисленного местоположения АНПА, удаленности точек изображения от антенн ГБО и местоположения самих антенн на борту АНПА). Распознавание ИПО производится по его границам (полутоновым), которые в свою очередь определяются величиной и направлением градиента. Для оценки частных производных градиента предложено использовать оператор Щарра (Scharr), который, как показали эксперименты, дает лучший результат (в сравнении с операторами Собела и Превита) при определении направления градиента. Проекция акустического изображения ГБО на поверхность дна обладает неравномерной решеткой, поэтому расчет величины градиента производится с учетом скорости движения подводного робота и горизонтального смещения точек относительно АНПА. Кроме того, для выделения границ искомого ИПО используется априорная информация о направлении объекта инспекции и динамических характеристиках АНПА.
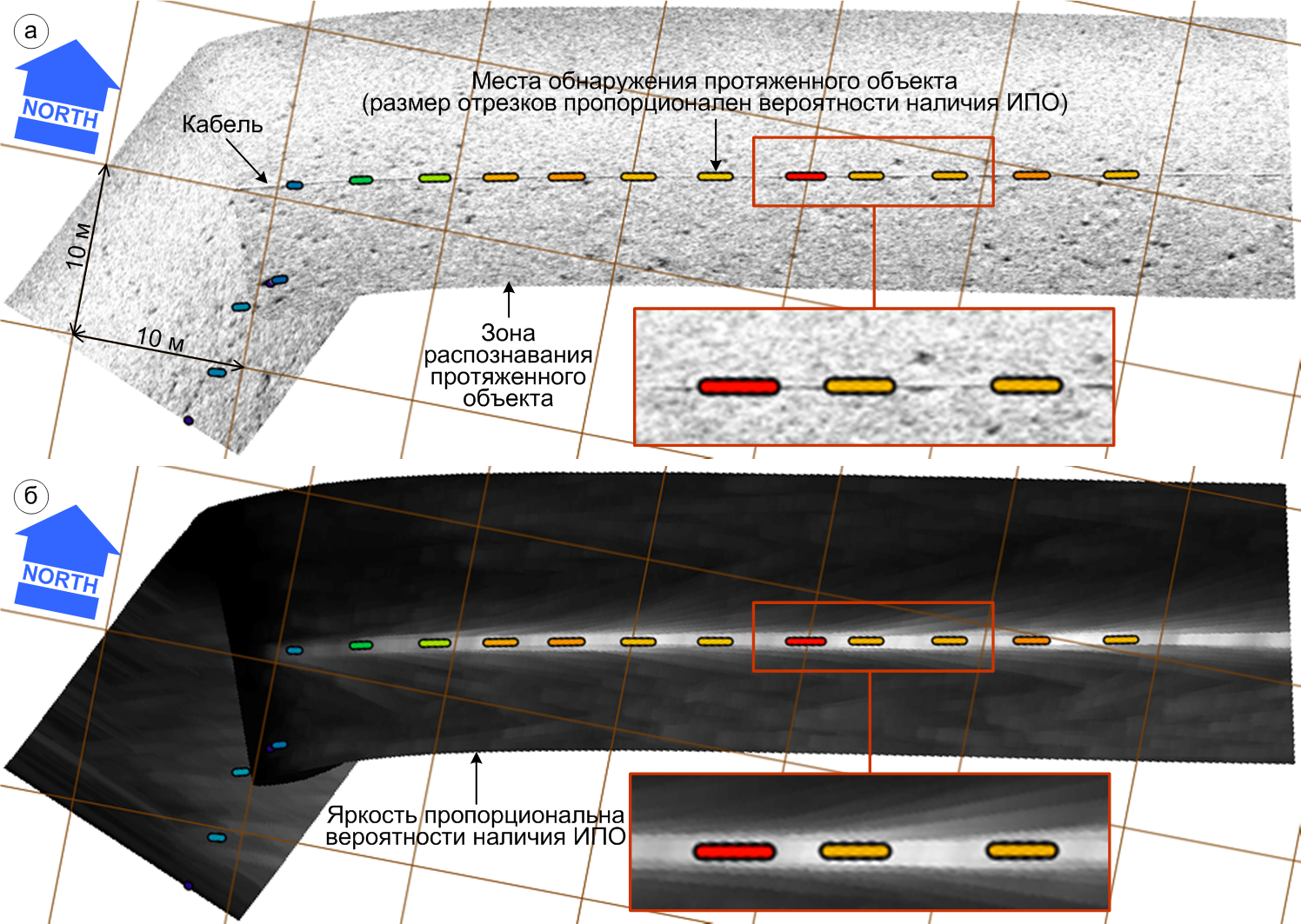
Рис. 1. Обработка гидроакустических снимков (приведён фрагмент выхода АНПА на протяженный объект): а) акустическая карта рельефа дна; б) карта вероятного местоположения распознанного объекта.
Идентификация протяженного объекта сводится к выделению наиболее выраженной прямой линии на карте границ объектов. Для поиска линий используется модификация преобразования Хафа (Hough). Оригинальное преобразование Хафа (часто применяется для выделения линии на фотоизображениях) представляет каждую линию на плоскости как вес в накопителе Wφ,ρ, где: φ – направление перпендикуляра к линии, ρ – расстояние от линии до центра изображения, Wφ,ρ – матрица. В отличие от фотоизображений, снимки ГБО не появляются одномоментно (строки эхограммы поступают с периодом 0,1~0,2 с), а длина эхограммы может составлять сотни тысяч строк. Поэтому в преобразование Хафа были внесены следующие изменения:
- центр системы координат связан с неподвижной относительно грунта точкой (например, с акустическим маяком);
- для исключения ситуации выхода за пределы массива, используется циклический по столбцам ρ накопитель Wφ,ρ;
- уменьшение веса обработанной информации и предотвращение переполнения в накопителе сделано с помощью экспоненциального затухания по времени t (что гарантирует больший вес для поступающих данных и исключает дополнительные переборные операции в массиве);
- угол φ представляет собой направление распознанной линии, т.к. оно необходимо системе управление АНПА для организации движения;
- для управления аппаратом требуется точное знание координат распознанного объекта (а каждой ячейке накопителя Wφ,ρ соответствует семейство прямых), поэтому введены два дополнительных накопителя усредненных координат искомого объекта Xφ,ρ и Yφ,ρ.
При появлении новой строки ГБО в момент времени t значения в накопителях изменяются по следующему закону:
 ; (1)
; (1) , (2)
, (2)где Wφ,ρ, Xφ,ρ и Yφ,ρ – значения накопителей в предыдущий (t-1) и текущий t моменты времени; K – коэффициент затухания; Δt – интервал времени до последнего обновления ячейки накопителя; wt,s – вес, равный яркости границ, если точка находится на линии с координатами [φ; ρ] и нулю – в противном случае; s – номер элемента в строке данных ГБО; S1 и S2 – границы области идентификации протяженного объекта на акустическом изображении; [xt,s; yt,s]T – абсолютные координаты пикселей изображения.
На рис. 1-б приведен фрагмент значений накопителя с привязкой к абсолютным координатам и соответствующий ему фрагмент акустической карты дна (рис. 1-а). Как видно из графиков местоположению кабеля на акустическом изображении соответствует максимум в накопителе Wφ,ρ (рис. 1-б, светлые участки) и верно распознанные координаты и направление протяженного объекта. Рис. 2 отражает графики изменений курса АНПА, направления распознанного объекта и дистанции от аппарата до идентифицированной прямой линии во время движения подводного робота параллельно ИПО. Можно видеть, что разброс значений при определении направления линии не превышает 1°, а погрешность определения дистанции составляет менее 0,2 м. Подобные данные могут быть использованы в контуре управления АНПА даже без применения дополнительной фильтрации.

Рис. 2. Результаты распознавания гидроакустических снимков во время движения АНПА вдоль протяженного объекта.
Результаты моделирования и обработки реальных изображений ГБО, полученных автономным аппаратом во время инспекции подводного кабеля, позволяют сделать вывод о возможности применения предложенного алгоритма распознавания в системе управления АНПА для инспекции подводных коммуникаций. К достоинствам описанного подхода можно отнести низкую ресурсоемкость применяемых алгоритмов (при распознавании обрабатывается только новая строка эхограммы). Основные результаты главы были представлены на зарубежной [2] и российской [3] конференциях, а также опубликованы в журнале [4].
В главе 3 рассматривается задача обнаружения ИПО в непосредственной близости от АНПА по данным многолучевой эхолокационной системы и электромагнитного искателя.
Многолучевая эхолокационная система. АНПА оснащаются эхолокационными дальномерными средствами для организации движения и сбора информации вблизи грунта. Текущие данные акустических дальномеров несут неполную информацию о форме окружающих объектов, поэтому для получения трехмерной картины эти данные объединяются с координатами носителя в моменты измерения дистанций. Разработанный алгоритм распознавания протяженного объекта состоит из двух этапов:
- На основе информации от эхолокационной и навигационной систем АНПА строится модель внешней среды подводного робота. Задача идентификации инспектируемого объекта сводится к задаче трехмерного распознавания акустически видимой части объекта на фоне дна.
- Априорно известная форма ИПО сравнивается с формой обследованной части дна с помощью алгоритма на основе нечеткой логики. Определяется вероятность нахождения объекта в обследованной части поверхности дна, а также взаимное расположение АНПА и объекта инспекции.
В основу модели рельефа положено описание поверхности дна с помощью параметрической вектор-функции (зависимость координат точек рельефа от номера дальномера и времени измерения дистанции), что позволяет хранить информацию о сложном рельефе (типа «козырек» или «камень») и других объектах которые не могут быть описаны с помощью карты высот (например, трубопровод). Координаты точек рельефа рассчитываются исходя из данных навигационной системы АНПА, известного положения антенн эхолокационной системы (ЭЛС) на борту аппарата и их показаний. Предполагается, что объект инспекции однозначно определяется формой своего поперечного сечения, поэтому можно определить нечеткие значения «поверхность» μ1 и «не поверхность» μ2 для всех откликов в районе ИПО. Для обнаружения объекта достаточно найти точку, находящуюся на его поверхности и лежащую над продольной осью ИПО. Суть алгоритма идентификации состоит в том, что для каждого нового отклика рассматривается гипотеза о его принадлежности вершине искомого объекта. Оценка существования протяженного объекта в данной точке рассчитывается исходя из следующих нечетких правил:
- Оценка существования искомого объекта в точке тем выше, чем больше точек окружения принадлежит его поверхности.
- Чем больше точек окружения лежат там, где они не могут находиться (внутри объекта, непосредственно под ним и т.д.), тем оценка существования объекта в данной точке ниже.
Расчет значений показателя наличия ИПО v0 в некоторой точке рельефа дна [X0;Y0;Z0]T производится следующим образом:
 , (3)
, (3)где Δx(t,s) и Δz(t,s) – координаты проекций точек поверхности дна на плоскость с центром координат в точке [X0;Y0;Z0]T и нормалью направленной вдоль объекта инспекции (Δx – ось вправо, Δz – вверх); Δt – интервал времени из которого выбираются точки окружения; S – количество акустических дальномеров, V1, V2 – веса функций принадлежности.
Особенность разработанного алгоритма идентификации состоит в том, что функции принадлежности могут формироваться для объекта произвольной формы. Таким образом, имеется возможность обнаруживать такие протяженные объекты как, трубопровод (в т.ч. с некруглым поперечным сечением) или траншея. Описание искомого объекта может задаваться как аналитически (для объектов простой формы), так и таблично (в виде графиков функций принадлежности).
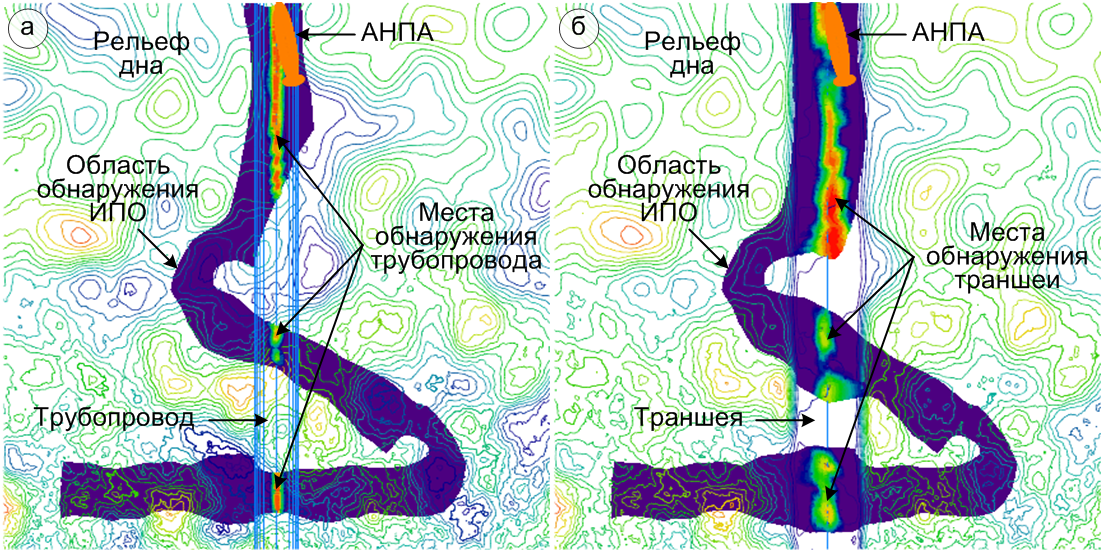
Рис. 3. Обнаружение протяженного объекта по данным ЭЛС (вид сверху): а) обнаружение трубопровода; б) обнаружение траншеи.
На рис. 3 представлены результаты проведения модельных экспериментов по идентификации трубопровода (рис. 3-а) и траншеи (рис. 3-б). Полоса переменной ширины вдоль траектории движения АНПА отражает площадь покрытия поверхности дна веером лучей ЭЛС. Результаты моделирования показали, что эхолокационные системы с десятью и более лучами позволяют идентифицировать протяженный объект (с поперечным сечением от 0,5 до 2 м) независимо от взаимной ориентации АНПА и ИПО. Вероятность обнаружения даже частично скрытого объекта инспекции выше 85% (что достаточно для управления АНПА). Результаты моделирования подтверждают возможность использования алгоритма в системе управления АНПА для решения задачи инспекции подводных трубопроводов и других протяженных объектов, обладающих существенным поперечным сечением. Первоначально алгоритм идентификации разрабатывался для обнаружения и отслеживания трубопроводов только круглого сечения и был представлен в рамках школы-семинара молодых ученых [5] и на зарубежном конкурсе работ аспирантов на конференции [6]. Дальнейшее развитие алгоритма опубликовано в [7,1].
Электромагнитный искатель. Одним из перспективных средств обнаружения металлосодержащих протяженных объектов является разработанный в ИПМТ ДВО РАН электромагнитный искатель (ЭМИ). Применяемый ранее метод детектирования ИПО с помощью ЭМИ (Агеев М.Д., Кукарских А.К.) предполагал ортогональность приемо-передающих антенных систем. Однако на практике этого не удается достичь из-за необходимости обеспечения дифференциального приема сигналов ЭМИ [10] (минимизация влияния излучаемого поля на приемные антенны). Поэтому был предложен усовершенствованный математический аппарат расчета местоположения и направления искусственного протяженного объекта с учетом произвольного взаимного угла между приемными и передающими антеннами.
Принцип действия ЭМИ основан на возбуждении электромагнитного поля в толще воды и измерении реакции окружающей среды на это поле. Идентификация объекта инспекции производится по измеренным напряженностям электромагнитного поля U0, U1, U2 на разных приемных антеннах (находящихся под разными углами к продольной оси АНПА) и сводится к определению: угла γ (между продольной осью АНПА и направлением ИПО) и показателя v «близости» протяженного объекта к корпусу аппарата. В работе выводятся зависимости этих величин от измеренных значений U0, U1, U2 и направлений приемных (α0, α1, α2) и передающих антенн (β0, β1, β2) относительно продольной оси АНПА. Конечные формулы для расчета направления γ и величины v выгладят следующим образом:
 ; (4)
; (4) , (5)
, (5)где a = U1 (sin α2 sin β2) – U2 (sin α1 sin β1), b = U1 (sin α2 cos β2 + cos α2 sin β2) – U2 (sin α1 cos β1 + cos α1 sin β1), c = U1 (cos α2 cos β2) – U2 (cos α1 cos β1). При этом в уравнении (4) выбирается корень, который удовлетворяет ряду физических ограничений.
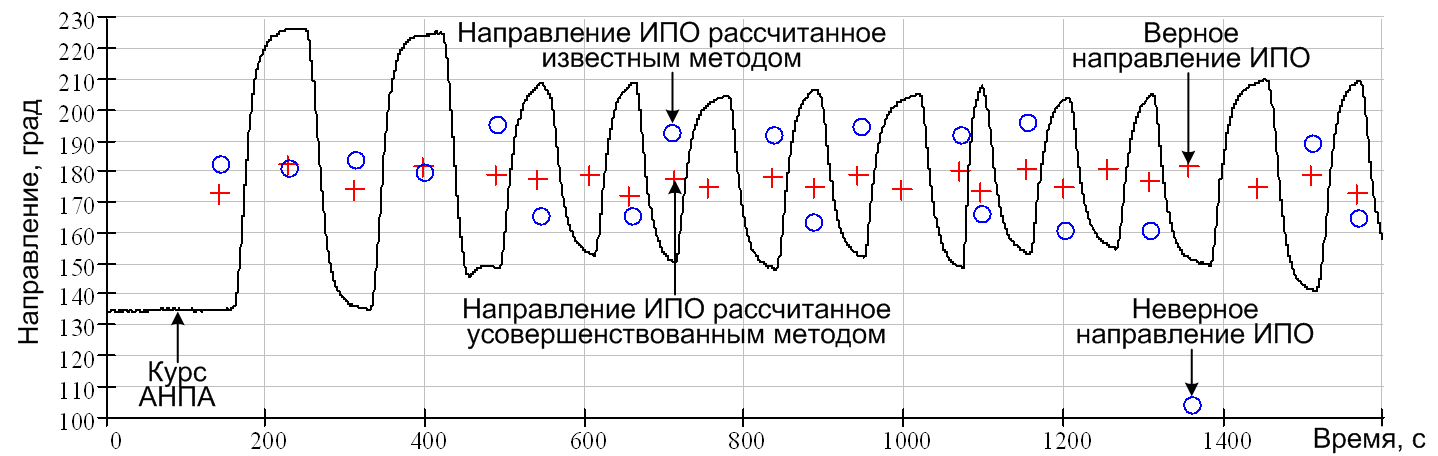
Рис. 4. Определение направления протяженного объекта по данным электромагнитного искателя.
На рис. 4 представлены данные первых 25 минут выполнения миссии инспекции металлосодержащего кабеля. После первого пересечения с кабелем (130 с) АНПА совершает маневровые движения «змейкой» вдоль направления инспектируемого объекта с углом захода около 45° и дистанцией отхода порядка 5 м. Можно видеть, что при пересечении кабеля определяемое направление ИПО совпадает с генеральным направлением объекта инспекции (около 180°). Количество детектируемых пересечений кабеля после усовершенствований увеличилось до 98% (против 76% при использовании известного метода), а среднеквадратичное отклонение в измерениях направления объекта составило около 7° (против 23° – ранее).
Полученные аналитические выражения для идентификации металлосодержащих протяженных объектов включают ранее известные ( Агеев М.Д., Кукарских А.К.) как частный случай (когда приемные и передающие антенны взаимно перпендикулярны). Натурные испытания подтвердили эффективность полученных результатов. Материалы, посвященные детектированию ИПО по данным ЭМИ, представлялись на международной конференции [8] и опубликованы в журнале [9]. Об особенностях устройства электромагнитного искателя излагается в [10].
В главе 4 рассматривается задача обработки данных от различных поисковых систем автономного необитаемого подводного аппарата при поиске и обследовании искусственных протяженных объектов. Приводится алгоритм интегральной обработки разнородной информации, позволяющий повысить вероятность обнаружения объекта и качество инспекционных работ. Разработанный алгоритм обработки данных поисковых систем АНПА включает два основных этапа (рис. 5):
- обработка данных о наличии и расположении объекта инспекции от всех имеющихся на борту систем идентификации, их предварительная фильтрация (на основе априорной информации о расположении и направлении ИПО) и приведение к единому формату;
- интегральная обработка полученных данных совместно с информацией от бортовой навигационной системы и построение на их основе общей картины местонахождения протяженного объекта (генерация вероятностной карты местонахождения ИПО).
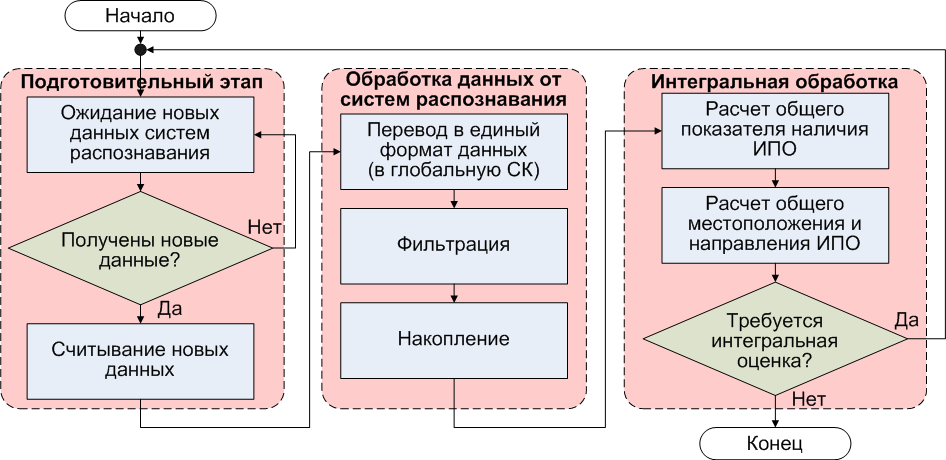
Рис. 5. Алгоритм интегральной обработки информации от разнородных сенсорных устройств АНПА.
Для определения наличия и координат инспектируемого объекта в окрестности АНПА предложено использовать не только текущие, но и ранее полученные данные систем распознавания, а также априорную информацию о местоположении и направлении ИПО. Показателем наличия искомого объекта по данным системы обнаружения n в момент времени t является величина pt<n>. Накопление контактов (данных распознавания) для отдельно взятой системы идентификации n производится аналогично пополнению ячеек накопителя при распознавании протяженных объектов на гидроакустических снимках (см. главу 2). Для постепенного уменьшения веса обработанной информации накопление экспоненциально затухает по времени t. Общий показатель наличия объекта инспекции ptИПО по данным всех систем определяется как взвешенная сумма накопленных оценок каждой подсистемы pt<n>Σ и априорной оценки нахождения объекта инспекции в данной точке w0(XtАНПА,YtАНПА). При этом весовые коэффициенты w<n> определяют степень доверия к каждой подсистеме обнаружения:
 ; (6)
; (6) , (7)
, (7)где pt<n>Σ – суммарная величина контактов к моменту времени t для подсистемы n; k<n> – коэффициент затухания для подсистемы n; XtАНПА и YtАНПА – координаты АНПА.
Интегральная оценка местоположения и направления протяженного объекта rtИПО рассчитывается аналогично, исходя из данных каждой подсистемы rt<n> и априорной информации о местоположении и направлении объекта инспекции в данном районе r0:
 ; (8)
; (8) , (9)
, (9)где rt<n>Σ = [Xt<n>Σ,Yt<n>Σ,Φt<n>Σ]т – промежуточная переменная (суммарная составляющая каждой координаты объекта к моменту времени t для системы n).
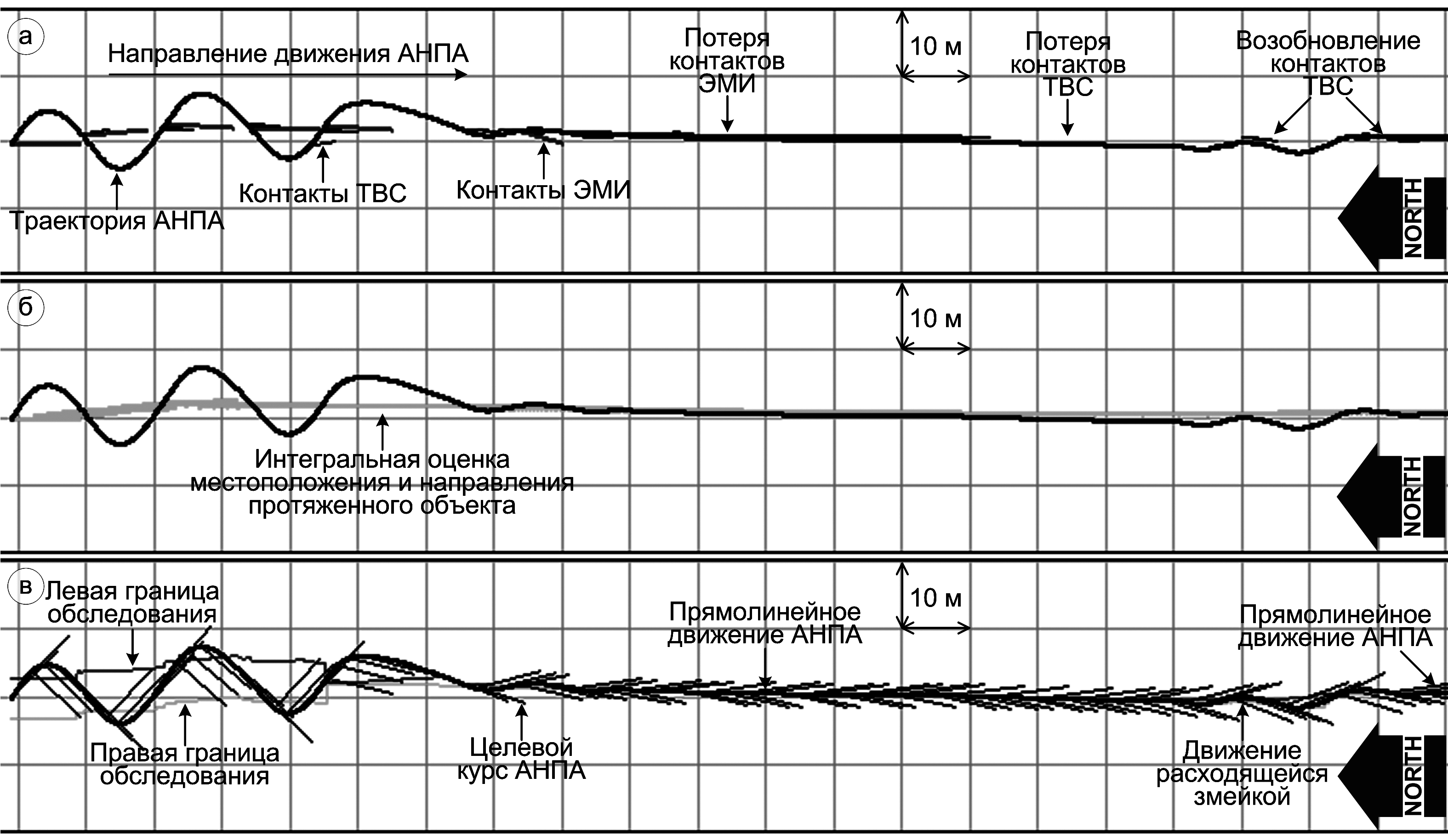
Рис. 6. Результаты натурных испытаний алгоритмов обследования кабеля с помощью ЭМИ и ТВС: а) траектория АНПА, контакты ЭМИ и ТВС; б) интегральное местоположение ИПО; в) границы обследования и целевой курс АНПА.
Рис. 6 демонстрирует результаты отслеживания кабеля генеральным направлением около 180° при совместном использовании электромагнитного искателя (ЭМИ) и телевизионной системы (ТВС) (см, рис. 6-а). Как видно из графиков, интегральная оценка местоположения и направления объекта (рис. 6-б) не подвержена существенному влиянию сбойных данных от подсистем распознавания и отражает координаты ИПО даже когда объект не детектируется. Натурные испытания показали, что разброс в определении интегрального направления ИПО в 90% случаев не превышает 3°, что достаточно для надежного управления АНПА при движении вдоль коммуникационных линий.
Предложенный алгоритм интегральной оценки данных систем идентификации ИПО был реализован в системе управления нескольких аппаратов, созданных в ИПМТ ДВО РАН и успешно прошел проверку во время инспекции разных подводных протяженных объектов. К его достоинствам можно отнести низкую ресурсоемкость, т.к. при появлении новых контактов систем распознавания производится накопление информации не связанное с перебором. Данные особенности позволяют использовать разработанный алгоритм в системе управления АНПА для планирования поведения подводного робота в режиме реального времени. Основные результаты главы были представлены на российской [11] и зарубежной конференции [12], а также опубликованы в [1,13].
В главе 5 рассматривается задача управления автономным необитаемым подводным аппаратом при поиске и обследовании искусственных протяженных объектов. Приводится разработанный алгоритм управления подводным роботом, который позволяет производить обследование инспектируемого объекта и прилегающей территории морского дна. Управление аппаратом во время инспекции подводных коммуникаций реализовано на координирующем уровне системы управления в виде программы-миссии, содержащей следующие этапы (рис. 7): 1) обнаружение объекта инспекции (поиск и уточнение его местоположения); 2) отслеживание ИПО (движение вдоль объекта); 3) обследование потенциально опасных мест; 4) возвращение АНПА и съемка окрестности инспектируемого объекта.
Поисковая траектория представляет собой кривую типа «зигзаг», которая выполняется до пересечения с объектом, напоминающим искомый. Направление галсов зигзага выбирается под углом от 30° до 80° к предполагаемому направлению ИПО, для обеспечения наискорейшего поиска объекта инспекции и перемещения вдоль объекта в случае пропуска пересечения с ним. Если во время поиска регистрируется протяженный объект, то поиск прерывается и начинается процедура локализации ИПО (см. рис. 7). На данном шаге аппарат выполняет траекторию типа «змейка», в центре которой находится первый контакт с протяженным объектом.
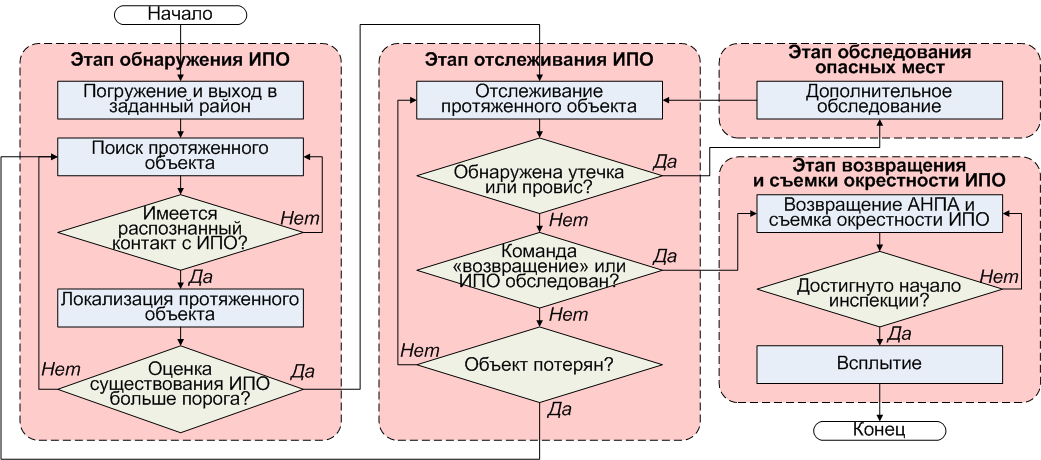
Рис. 7. Алгоритм поведения АНПА во время инспекции протяженного объекта.
После обнаружения протяженного объекта, АНПА переходит к этапу отслеживания (рис. 7). Задача отслеживания представляет собой движение АНПА над центром протяженного объекта (на высоте 1~3 м для обеспечения фотосъемки) с постоянным уточнением местоположения ИПО (с использованием описанного в главе 4 алгоритма). Управление АНПА производится путем выработки целевого курса (рис. 6-в), высоты и скорости аппарата. Целевой курс представляется в виде суммы следующих величин: направления инспектируемого объекта, угла пересечения с объектом и величины, стабилизирующей траекторию АНПА над объектом инспекции. При потере контакта с объектом инспекции (уменьшение интегральной оценки существования ИПО, см. гл. 4) АНПА переходит к осуществлению поисковой траектории, которая характеризуется как увеличением угла захода на объект, так и расширением границ обследования. Таким образом, траектория подводного аппарата представляет колебательное движение вдоль объекта инспекции (амплитуда колебаний обратно пропорциональна вероятности наличия ИПО). При максимальной оценке существования объекта движение вырождается в прямую линию, а при уменьшении (потеря объекта) – вновь возникают колебательные движения (производится поиск). Если во время отслеживания ИПО детектируется опасный участок (утечки, провисы), то процедура отслеживания приостанавливается и аппарат переходит к дополнительному обследованию (см. рис. 7).

Рис. 8. Реализация разработанных алгоритмов в системе управления АНПА.
По окончании этапа отслеживания подводный аппарат находится на большом удалении от начала инспекции, поэтому обзор окрестности протяженного объекта проводится во время возвращения АНПА в исходную точку. Съемка окрестности ИПО осуществляется гидролокатором бокового обзора. При этом аппарат двигается параллельно протяженному объекту на расстоянии и высоте, обеспечивающем наилучшее качество изображений. Траектория АНПА планируется на основе собранных координат ИПО и может корректироваться по данным распознавания гидролокационных изображений.
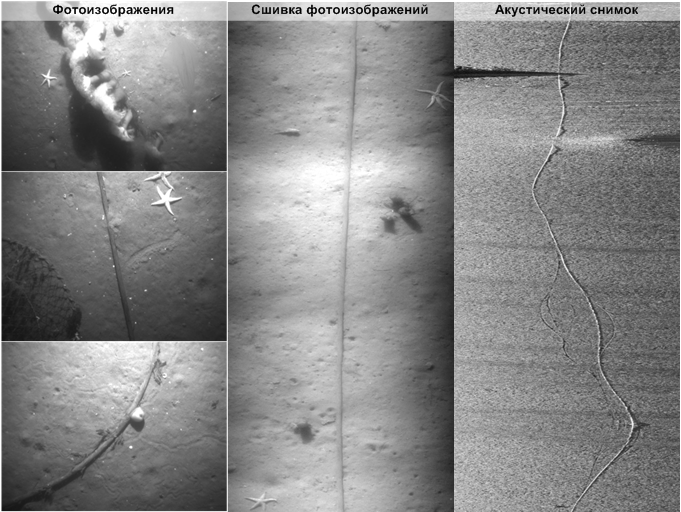
Рис. 9. Фрагменты материалов, полученных во время обследования информационного кабеля в Уссурийском заливе с помощью АНПА.
Описанные алгоритмы реализованы в системе управления нескольких аппаратов, разработанных в ИПМТ ДВО РАН (рис. 8). Результаты моделирования, морских испытаний и опытной эксплуатации [2] подтвердили эффективность применяемых алгоритмов. Покрытие протяженного объекта фотоснимками во время инспекции составляет 90%~100% – при наличии телевизионных контактов и 20%~40% – в противном случае. При этом достигается 100% покрытие протяженного объекта (и 10-ти метровой окрестности) с помощью гидроакустической съемки. На рис. 9 приведены фрагменты фото и акустических изображений, которые были получены во время инспекции. Снимки отражают состояние кабеля и его окружения (состояние защитной оболочки, обрастание морскими организмами, подвижки, провисы, посторонние предметы), что и требовалось получить во время инспекции. Алгоритмы, описывающие поведение АНПА при инспекции трубопроводов, были представлены на российской [14] и зарубежной [15] конференциях. Управление АНПА во время поиска и отслеживания протяженных объектов изложено в работе [16] и представлено на конференции [17].
ОСНОВНЫЕ РЕЗУЛЬТАТЫ РАБОТЫ
Основные выводы и результаты, полученные в диссертации:
- Разработан алгоритм идентификации ИПО по данным гидролокатора бокового обзора. К достоинствам алгоритма следует отнести низкую ресурсоемкость (эхограмма гидролокатора обрабатывается построчно по мере поступления новой информации), что позволяет идентифицировать ИПО в реальном масштабе времени на борту АНПА. Результаты обработки модельных и реальных акустических изображений (полученных автономным аппаратом во время инспекции подводного кабеля) позволяют сделать вывод о возможности применения предложенного алгоритма в системе управления АНПА для инспекции подводных коммуникаций.
- Усовершенствован метод распознавания металлосодержащих протяженных объектов, который позволяет рассчитывать направление и близость протяженного объекта для неортогональной антенной системы электромагнитного искателя АНПА. Результаты натурных испытаний подтвердили эффективность метода во время поиска и отслеживания металлосодержащего кабеля.
- Предложен алгоритм идентификации искусственных подводных протяженных объектов, который ориентирован на использование многолучевых эхолокаторов. Результаты моделирования подтверждают возможность применения алгоритма для решения задачи инспекции крупногабаритных протяженных объектов (трубопроводов, траншей). Данный алгоритм может также использоваться для идентификации ИПО по данным оптических дальномеров (например, лазерных датчиков расстояния).
- Разработан и реализован в системе управления АНПА алгоритм интегральной обработки данных от систем идентификации протяженных объектов, который успешно прошёл проверку, как во время испытаний, так и при выполнении реальных работ. К достоинствам алгоритма можно отнести низкую ресурсоемкость, поскольку используется накопление информации не связанное с перебором.
- Разработан алгоритм управления автономным подводным аппаратом для проведения инспекции протяженных объектов, включающий следующие этапы: поиск и обнаружение объекта инспекции, отслеживание ИПО, обследование потенциально опасных мест, возвращение АНПА и съемка окрестности инспектируемого объекта. Описанный алгоритм реализован в системе управления подводных роботов, разработанных в ИПМТ ДВО РАН. Результаты моделирования, морские испытания и опытная эксплуатация подтвердили эффективность предложенного алгоритма при решении задач инспекции подводных протяженных объектов.
Публикации по теме диссертации
- Inzartsev A.V., Pavin A.M. AUV Application for Inspection of Underwater Communications // Underwater Vehicles edited by Alexander Inzartsev, In-Tech Publishers, Vienna, Austria. 2009. P. 215-234.
- Inzartsev A.V., Pavin A.M., Matvienko Yu.V. AUV Application for Inspection of Partly Silted Underwater Cables // Sixth International Symposium on Underwater Technology, Wuxi, China, April 2009, CD-ROM Proceedings.
- Павин А.М. Распознавание кабельных линий на гидроакустических изображениях морского дна // Материалы третьей всероссийской научно-технической конференции «Технические проблемы освоения мирового океана», Владивосток, 22-25 сентября 2009 г. С. 311-316.
- Павин А.М. Идентификация подводных протяженных объектов на акустических снимках гидролокатора бокового обзора / Приборы. 2009. №12. C. 43-50.
- Павин А.М. Метод идентификации подводного трубопровода на основе многолучевой эхолокационной информации АНПА: разработка и моделирование // Материалы VIII школы-семинара молодых ученых «Математическое моделирование и информационные технологии». Ин-т динамики систем и теории управления СО РАН. - Иркутск, 8-12 июля 2006. С. 134-138.
- Pavin A.M. The Pipeline Identification Method Basing on AUV's Echo-Sounder Data // OCEANS’06 MTS/IEEE Conference, September 18-21, 2006, Boston, MA, USA, CD-ROM Proceedings.
- Инзарцев А.В., Павин А.М. Использование эхолокационной информации для обнаружения и инспекции искусственных протяженных объектов автономным необитаемым подводным аппаратом / Подводные исследования и робототехника. 2006. №2. С. 27-35.
- Kukarskih A.K., Pavin A.M. Using of Electromagnetic Searcher for Inspection of Metallic Cable by Means of AUV // OCEANS’08 MTS/IEEE Kobe-Techno-Ocean Conference, Kobe, Japan, April 8-11, 2008, CD-ROM Proceedings.
- Кукарских А.К., Павин А.М. Электромагнитный искатель для обнаружения и отслеживания металлосодержащих подводных протяженных объектов / Приборы. 2008. №4. С. 33-38.
- Кукарских А.К., Павин А.М. Оптимизация характеристик электромагнитного гидролокатора подводного робота на основе дифференциальной методики расчета приемных сигналов / Подводные исследования и робототехника. 2008. №6, С. 43-48.
- Инзарцев А.В., Павин А.М. Организация движения АНПА вдоль одномерных протяженных объектов на основе комплексирования информации телевизионной системы и электромагнитного искателя // Материалы международной научно-технической конференции «Технические проблемы освоения мирового океана», Владивосток, 2-5 октября 2007 г, С. 91-97.
- Inzartsev A.V., Pavin A.M. AUV Cable Tracking System Based on Electromagnetic and Video Data // OCEANS’08 MTS/IEEE Kobe-Techno-Ocean Conference, Kobe, Japan, April 8-11, 2008, CD-ROM Proceedings.
- Инзарцев А.В., Павин А.М. Интегрированная система технического зрения и управления АНПА для поиска и обследования протяженных кабельных линий / Подводные исследования и робототехника. 2007. №4. С. 15-20.
- Инзарцев А.В., Павин А.М. Планирование движения АНПА вдоль трубопровода на основе эхолокационной информации // Материалы международной научно-технической конференции «Технические проблемы освоения мирового океана», Владивосток, 14-17 сентября 2005 г, С. 33-39.
- Inzartsev A.V., Pavin A.M. AUV Behavior Algorithm While Inspecting of Partly Visible Pipeline // OCEANS 2006 MTS/IEEE Conference, September 18-21, 2006, Boston, MA, USA, CD-ROM Proceedings.
- Инзарцев А.В., Павин А.М. Управление автономным необитаемым подводным аппаратом при инспекции искусственных протяженных объектов / Мехатроника, автоматизация, управление. 2008. №4. С. 47-54.
- Инзарцев А.В., Киселев Л.В., Медведев А.В., Павин А.М. Управление автономным подводным роботом при обследовании объектов и областей дна // Международная конференция по подводным технологиям (Subsea Tech). С-Петербург. Сентябрь 2009 г. Материалы CD-ROM.
Личный вклад автора. Результаты, составляющие основное содержание диссертации получены автором самостоятельно. В совместных работах, автор внес следующий вклад: [1,2,7-10] – разработка, описание и реализация алгоритмов распознавания ИПО и генерации формы рельефа дна, проведение моделирования и участие в натурных испытаниях; [11-17] – разработка, описание и реализация алгоритмов интегральной оценки данных, поиска и обследования ИПО, построение полей параметров среды, моделирование, совместное проведение натурных экспериментов.
Павин Александр Михайлович
РАЗРАБОТКА АЛГОРИТМОВ ПОИСКА И ОБСЛЕДОВАНИЯ ИСКУССТВЕННЫХ ПРОТЯЖЕННЫХ ОБЪЕКТОВ С ПОМОЩЬЮ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА
Автореферат
диссертации на соискание ученой степени
кандидата технических наук
Подписано к печати 19.05.10
Формат 60х84/16 Печать офсетная. Усл.п.л. 1. Уч.-изд.л. 0,83.
Тираж 100 экз. Заказ.67
Отпечатано в типографии ФГУП Издательство «Дальнаука» ДВО РАН
6

 90041, г. Владивосток, ул. Радио 7
90041, г. Владивосток, ул. Радио 7