
Методы визуализации акустических полей и их применение в диагностике
| Вид материала | Документы |
- Образовательная программа 200300 Биомедицинская инженерия Дисциплина Применение ультразвука, 34.33kb.
- Методы Разработки и Визуализации Данных, 21.72kb.
- Методы визуализации информации – наукоемкое направление современных, 106.8kb.
- Использование высокотехнологичных методов исследования в функциональной диагностике, 39.74kb.
- Возможности методов лучевой диагностики в визуализации дополнительных образований почек, 154.33kb.
- Эталонный комплекс для метрологического обеспечения акустических измерений в твердом, 58.45kb.
- Методы медико-биологических исследований. Средства и способы получения изображений, 20.79kb.
- Портативный компьютерный термограф иртис иртис, 31.86kb.
- Метод эпр для измерения магнитной индукции переменных полей, 65.24kb.
- Роль и место современных методов визуализации в диагностике и лечении острой кишечной, 433.08kb.
Раздел 3 Методы визуализации акустических
полей и их применение в диагностике
Благодаря последним достижениям в области электроники, оказалось возможным создание методов сканирования ультразвукового луча положенных в основу УЗ систем визуализации.
В настоящее время системы УЗ визуализации стали важнейшим техническим средством для врачей, дополняющим рентгеновские или ядерные устройства отображения. Эти методы позволяют видеть внутренние органы человека, как изображение, воспроизводящее один к одному, соответствующие анатомические детали и представляют собой мощное диагностическое средство современной медицины.
Отметим, что при рентгеновской визуализации используется трансмиссионный метод, при котором визуализируется картина представляющая собой распределение поглощающей способности анатомических структур организма по визуализируемому участку. В процессе визуализации количественная мера коэффициента поглощения рентгеновских лучей отображается на другую количественную меру, например яркость изображения или цвет изображения.
При использовании акустических полей также возможно получение изображения отображающего коэффициент прохождения ультразвука через исследуемую структуру. Однако такие методы визуализации не нашли распространения в медицине, т.к. они требуют двустороннего доступа и обладают низкой чувствительностью. В настоящее время в медицине используется ультразвуковая эхо-импульсная визуализация.
Существующие эхо-импульсные системы насчитывают много видов. Основным элементом любой системы визуализации является электроакустический преобразователь, который служит для излучения зондирующего акустического импульса в объект и для приема акустических эхо-сигналов, переизлучаемых неоднородностями акустической плотности. Преобразователь может представлять собой пластинку из пьезоэлектрического материала или одно- или двумерную решетку пьезоэлементов. Для использования эхолокации необходимо знать точное расположение преобразователя и ориентацию оси УЗ пучка в пространстве. При этих условиях можно правильно определить положение обнаруженных рассеивателей ультразвука. Для получения визуальной картины необходимо сканирование, т.е. движение оси пучка через исследуемый объем. Сканирование можно выполнить одним из трех способов: путем перемещения всего преобразователя с фиксированным направлением пучка вручную, с использованием механического привода, а также путем движения пучка относительно неподвижного преобразователя (решетки), что достигается с помощью электронного управления.
Устройством отображения, почти повсеместно применяемым для ультразвуковой эхо-импульсной визуализации, служит электронно-лучевая трубка (ЭЛТ). Поэтому состояние разработок и характеристики систем визуализации сильно зависят от характеристик ЭЛТ (полосы частот, размера светящейся точки на экране, динамического диапазона).
В настоящее время общепринятыми являются два основных режима отображения: непосредственное отображение видеосигнала с выхода приемного тракта и отображение сигнала с промежуточного запоминающего устройства. Из-за практического удобства последний режим применяется все чаще, т.к. он позволяет хранить и анализировать изображения, не прибегая к непрерывной регистрации (фотографированию и т.п.), а также позволяет делать выбор процедуры обработки или анализа данных, соответствующих изображений или какой-то его части. Важным достоинством режима промежуточного запоминания является то, что он обеспечивает сопряжение параметров сканирования, обусловленных особенностями ультразвука и анатомического строения человека, и стандартных телевизионных устройств, что выгодно с точки зрения стоимости и доступности техники [16].
3.1. Режимы представления эхо-импульсной информации
В настоящее время применяются различные методы регистрации эхограмм, каждый из которых имеет свои преимущества в конкретных областях медицины. Наиболее простым методом УЗ визуализации является изображение типа А. Регистрация амплитуд отраженных ультразвуковых импульсов в функции глубины называется изображением типа А.
В таком изображении расстояние между датчиком-излучателем ультразвука и поверхностью соприкосновения тканей неодинаковой акустической плотности, измеряемое вдоль оси датчика, раскладываются по горизонтальной оси экрана, а амплитуды отраженных импульсов по вертикальной. Типичный образец изображения типа А показан на рис. 3.1.
УЗ импульс, распространяясь в теле человека и частично поглощаясь, будет отражаться от поверхности соприкосновения, двух тканей неодинаковой акустической плотности. Часть энергии УЗ импульса будет преломлена на границе тканей и продолжит распространяться во второй ткани, а часть энергии импульса будет отражена от поверхности. Если эта поверхность расположена перпендикулярно направлению распространения ультразвука, то отраженная часть энергии импульса будет восприниматься датчиком и преобразовываться в электрический сигнал, который после необходимой обработки отображается на экране. Не отраженная часть энергии импульса продолжит распространяться по прямой, все еще частично поглощаясь на пути до достижения очередной границы между двумя тканями неодинаковой акустической плотности. Таким образом, вся эхограмма представляющая одномерную картину поверхностей с

оприкосновения тканей неодинаковой акустической плотности, постепенно изображается на экране.
Рис. 3.1. Изображение типа А
Эхограммы регистрируются прямо на экране ЭЛТ и необходимы для определения расстояния, регистрации амплитуды отраженных импульсов, различия плотных тканей от пузырных и т.п. Аппаратура этого класса достаточно проста и применяется для обследования органов имеющих простое анатомическое строение. К приборам этого класса относятся отечественные «ЭХО-11»; «ЭХО-12»; «ЭХО-21» и др.
На рис. 3.2 показана структурная схема аппаратуры, использующей сканирование типа А. Преобразователь 2 служит для преобразования электрических колебаний в ультразвуковые излучения ультразвуковых полей в объект, приема эхо-импульсов от отражающих поверхностей объекта 1. Синхронизатор 3 обеспечивает синхронную работу узлов дефектоскопа, запуская генератор зондирующих и
мпульсов 4, глубиномер 12, а также генератор развертки 10. Роль синхронизатора иногда выполняет генератор зондирующих импульсов.
Рис. 3.2. Структурная схема прибора с разверткой типа А
Генератор зондирующих импульсов 4 вырабатывает высокочастотные электрические импульсы, возбуждающие преобразователь 2. Приемно-усилительный тракт состоит из усилителя высокой частоты (УВЧ) 6, детектора 7 и видеоусилителя 8. Коэффициент усиления УВЧ во времени регулируется напряжением, подаваемым с блока 9 временной автоматической регулировки чувствительности (ВАРЧ). Особенностью УВЧ является требование малого времени восстановления чувствительности после воздействия зондирующего импульса. Детектор или видеоусилитель обычно снабжают регулируемой отсечкой шумов, исключающей прохождение на выход прибора шумов. Блок ВАРЧ уменьшает коэффициент усиления усилителя в момент излучения зондирующего импульса, а затем восстанавливает его по определенному закону, обеспечивающему компенсацию уменьшения амплитуд с увеличением глубины зондирования. Генератор развертки 10 предназначен для формирования напряжения развертки луча на экране ЭЛТ 14, получения импульсов подсвета и селектирующих импульсов. Генератор задержки 11 необходим, если часть пути УЗ колебаний проходит по контролируемой зоне, например, по призме преобразователя или иммерсионной жидкости. В этом случае, начало развертки смещается на постоянный интервал времени.
Развитием А-режима является режим отображения движущихся органов, разработанный в основном для исследования сокращений сердца и диагностики работы клапанов сердца. Этот режим получил название М-режима (метод временного движения). В этом методе, движение тканей, расположенных вдоль линии, наблюдается непрерывно, в то время как позиция источника ультразвуковых колебаний фиксирована.
В
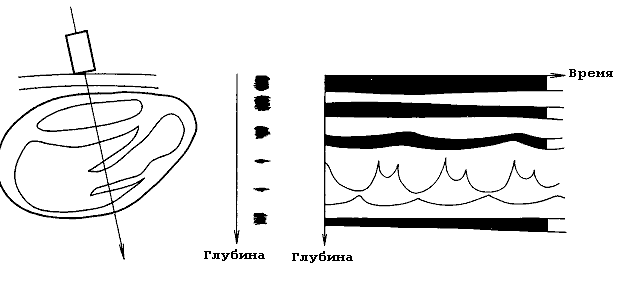
ертикальное местоположение эхо-сигнала на диаграмме, изображенной на рис. 3.3, представляет глубину тканей. Местоположение эхо-сигнала изменяется вдоль оси времени и показывает движение каждой ткани.
Рис 3.3. Принцип метода временного движения (М-режима)
Этот метод эффективен в диагнозе различных сердечных сбоев, в том числе и тех, которые вызывают ненормальную работу сердечных клапанов. С помощью данного метода можно обнаружить опухоль сердца. Но определение её местоположения и размера должны производиться в комбинации с отображением поперечного сечения.
При М-режиме амплитуда видеосигнала модулирует яркость строки. Все полученные строки медленно разворачиваются по горизонтали, в результате чего формируется характерная М-эхокардиограмма, приведенная на рис. 3.4.
Рис. 3.4. М-эхограмма
Если датчик, излучающий ультразвук и воспринимающий отраженные от поверхности эхо-импульсы, перемещать по телу пациента и одновременно эхограммы, соответствующие различным участкам тела, раскладывать по высоте экрана, то получается динамическая картина – так называемая эхограмма типа «время-движение» (ТМ–time move). Такая эхограмма похожа на картину, получаемую с помощью электрокардиографа [17].
Сканирование с яркостной индикацией позволяет получать в эхо-режиме двумерное изображение сканированного объекта в плоскости его поперечного сечения [18]. Такой вид сканирования получил название В-сканирования. Изображение при В-сканировании создается в результате перемещения узкого акустического пучка в заданной плоскости. Принимаемые эхо-сигналы располагаются на экране устройства отображения таким образом, чтобы имело место соответствие, между строками развертки на экране и направление распространения ультразвука в ткани. Структурная схема обобщенного В-сканера представлена на рис. 3.5.
Импульсный генератор возбуждает преобразователь, в результате чего последний вырабатывает короткий акустический импульс. Акустические сигналы, отраженные от объектов, расположенных по траектории УЗ-пучка, поступают на преобразователь, преобразуются в электрические сигналы и далее обрабатываются для вывода на дисплей. Очень часто в подобных устройствах предусмотрено изменение во времени коэффициента усиления усилителя. Это нужно для частичной компенсации затухания сигналов, отраженных от глубоких слоев. Такая регулировка называется временной компенсацией усиления. Положение и угловая ориентация УЗ-луча контролируется при помощи электронных схем контроля положения пучка, которые задают п
оложение развертки эхо-сигналов на экране.
Рис. 3.5. Блок-схема системы с В-сканированием
После приема эхо-сигналов преобразователем они усиливаются, выпрямляются, а затем подаются на дисплей для модуляции яркости. В системах визуализации первых разработок в их состав входил стандартный дисплей на ЭЛТ, имеющий лишь два уровня яркости (типа темно/светло). Регулировка порога позволяет изменять значение критического уровня сигнала; все эхо-сигналы, превышающие этот уровень, отображаются на экране с одинаковой яркостью, а эхо-сигналы не превышающие его, вообще не отображаются. При таком дисплее вид получаемых изображений чрезвычайно сильно зависит от величины порога, так что обеспечить воспроизводимость такого изображения довольно трудно.
Одним из наиболее важных достижений в области получения акустических изображений оказалось введение в систему полутонового устройства отображения [18]. В таком устройстве обычно имеется не менее 10 градаций яркости. В системе визуализации этого типа устанавливается соответствие между данным уровнем яркости и интенсивностью эхо-сигнала, а более слабые – с соответственно меньшей яркостью. При этом метод В-сканирования дает изображения, структура которых в меньшей степени зависит от действия оператора и которые интерпретировать легче, чем изображения на дисплее с двумя уровнями яркости. Информативность полутоновых изображений также оказывается выше. Поэтому системы с полутоновыми устройствами отображения получили широкое распространение.
Кроме этого применяются цветные устройства отображения, в которых разные по интенсивности эхо-сигналы отображаются сигналами разной цветности [18, 19]. Цветное изображение в отличие от черно-белого позволяет получать два добавочных параметра: цвет и насыщенность. Благодаря этому увеличивается информативная способность изображения.
На рис. 3.6 представлены типичные изображения для трех видов сканирования: линейного, секторного и дугового.
а б
в
Рис. 3.6. Механическое перемещение и форма представления
изображения при линейном (а), секторном (б) и дуговом (с)
В-сканировании
Для наглядности преобразователь показан в увеличенном виде; обычно диаметр преобразователя во много раз меньше размера исследуемой области. При линейном сканировании (рис. 3.6, а) преобразователь перемещается по прямой линии. Отметим, что поле зрения в направлении движения равно длине пути преобразователя, тогда как по временному измерению (по глубине), поле зрения определяется только глубиной проникновения ультразвука (т.е. зависит от частоты и затухания) или же физическими размерами сканируемого объекта. Преимущество этого метода заключается в том, что изображение формируется с равномерной плотностью строк в растре, в результате чего пространственная частота дискретизации постоянна по объекту и изображение на экране имеет привычный вид.
При секторном сканировании (рис. 3.6, б) преобразователь располагают в какой-то одной точке на объекте или над объектом и качают в пределах углового сектора обзора [20].
В этом случае поле зрения увеличивается с увеличением глубины проникновения ультразвука. Однако по мере расширения поля зрения плотность строк в растре уменьшается. Этот вид сканирования особенно удобен для просмотра объекта через узкие отверстия, например для наблюдения сердца через грудную клетку.
При дуговом сканировании (рис. 3.6, с) преобразователь перемещается по дуге окружности, в результате чего форма изображения имеет вид, обратный форме изображения при секторном сканировании [20]. Причем поле зрения максимально вблизи преобразователя и уменьшается с глубиной проникновения. Дуговое сканирование и его модификация чаще всего применяется при ручном сканировании брюшной полости, поверхность которой близка к дуге окружности.
Комбинированное сканирование [21], которое представляет собой сочетание секторного сканирования с линейным или дуговым, иллюстрирует рис. 3.7.
Рис. 3.7. Механическое перемещение и форма представления изображения при комбинированном линейном сканировании
(показаны только два положения преобразователя)
Отметим, что в области комбинированного сканирования точки объекта визуализируются более чем одним УЗ-пучком. Для наглядности здесь показаны только два положения преобразователя на прямолинейной траектории и соответствующие секторы обзора. Обычно при комбинированном сканировании сектор обзора намного меньше, чем при простом секторном сканировании (при секторном сканировании отклонение преобразователя составляет до ±45°). При комбинированном сканировании точки объекта облучаются не одним, а несколькими акустическими импульсами с разных направлений.
К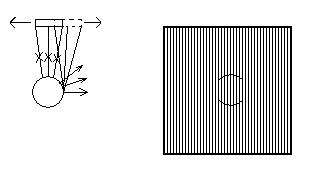
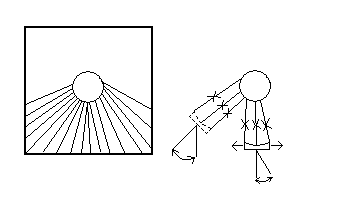 омбинированное сканирование служит для преодоления основной проблемы, возникающей при В-сканировании, трудности визуализации зеркальных отражений и объектов, расположенных за этими отражателями, т.к. направление отражения ультразвука зеркальным отражателем зависит от ориентации отражателя по отношению к преобразователю. Поэтому падающий на зеркальный отражатель УЗ пучок может отразиться в таком направлении, что эхо-сигнал не попадет на преобразователь. Это явление (ошибочно) интерпретируется как отсутствие отражателя, и соответствующего изображения не вырабатывается, даже если фактически поверхность раздела имеет очень большой коэффициент отражения. Такой случай показан на рис. 3.8,а при простом линейном сканировании цилиндрического объекта (например, кровеносного сосуда). Ультразвук, падающий на боковой участок объекта, после отражения проходит мимо преобразователя и поэтому не может быть зарегистрирован. В простом случае можно мысленно соединить две полученные дуги, чтобы восстановить истинную форму объекта; однако при исследовании сложного биологического объекта такое восстановление не всегда возможно.
омбинированное сканирование служит для преодоления основной проблемы, возникающей при В-сканировании, трудности визуализации зеркальных отражений и объектов, расположенных за этими отражателями, т.к. направление отражения ультразвука зеркальным отражателем зависит от ориентации отражателя по отношению к преобразователю. Поэтому падающий на зеркальный отражатель УЗ пучок может отразиться в таком направлении, что эхо-сигнал не попадет на преобразователь. Это явление (ошибочно) интерпретируется как отсутствие отражателя, и соответствующего изображения не вырабатывается, даже если фактически поверхность раздела имеет очень большой коэффициент отражения. Такой случай показан на рис. 3.8,а при простом линейном сканировании цилиндрического объекта (например, кровеносного сосуда). Ультразвук, падающий на боковой участок объекта, после отражения проходит мимо преобразователя и поэтому не может быть зарегистрирован. В простом случае можно мысленно соединить две полученные дуги, чтобы восстановить истинную форму объекта; однако при исследовании сложного биологического объекта такое восстановление не всегда возможно.
а б
Рис. 3.8. Линейное сканирование
и изображение цилиндрического зеркального отражателя (а);
комбинированное сканирование (сочетание линейного и секторного сканирования) того же объекта (б).
Комбинированное сканирование помогает «дорисовать» ту часть зеркальной отражающей поверхности, которая не визуализируется при простом сканировании. Этот случай иллюстрирует рис. 3.8, б. Здесь также показаны только два положения преобразователя на линейной траектории и лишь один угол отклонения, обеспечивающий визуализацию боковой части поверхности сосуда. Комбинированное сканирование удобно также при визуализации областей, расположенных за сильно отражающими или поглощающими структурами (например, за ребрами), т.к. оно позволяет зондировать скрытые участки объекта по направлениям, на которых отсутствует затенение.
3.2. Электронное сканирование
Существует два типа систем визуализации с электронным В- сканированием: системы с линейным шаговым перемещением пучка (обычно называется просто линейной матрицей) и системы с линейной фазированной матрицей (обычно называется фазированной матрицей).
Для линейной матрицы требуется большое число элементов малых размеров, расположенных один за другим. Они образуют линейную матрицу обычно шириной около 1 см и длиной от 10 до 15 см. Конфигурация линейной матрицы с шаговым перемещением пучка показана на рис. 3.9, а.
В каждый момент времени, возбуждая от одного до четырех элементов, эта группа последовательно перемещается вдоль матрицы, так что УЗ-пучок движется по линейной траектории, хотя матрица остается неподвижной в пространстве.
Фазированная матрица имеет аналогичную конструкцию, однако работает иначе. Преобразователь в фазированной матрице меньше по размерам (ширина – около 1 см, длина – 1–3 см) и обычно содержит меньшее число элементов (Рис. 3.9, б).
Все его элементы возбуждаются одновременно, а угол наклона УЗ-пучка меняется путем соответствующего фазирования излучаемых сигналов, подводимых к элементам, а также путем фазирования сигналов, принимаемых каждым элементом. Такая система аналогична радиолокационной станции с фазированной антенной решеткой.
а
б
Рис. 3.9. Системы электронного сканирования
с линейной (а) и фазированной матрицей (б)
3.3. Системы с линейной матрицей
В медицине нашли применение несколько систем с линейной матрицей. Хотя изображение можно получать, возбуждая в каждый момент времени только один элемент для формирования отдельных строк изображения, из-за низкой разрешающей способности и чувствительности такой метод мало эффективен. Поэтому элементы матрицы объединяют в небольшие группы; в результате последовательного отключения последнего элемента группы и подключения следующего элемента матрицы группа шагами перемещается вдоль решетки, сдвигаясь каждый раз на один элемент. Таким образом, благодаря формированию группы элементов, увеличивается активная площадь преобразователя, возрастает чувствительность, увеличивается апертура и в соответствии с теорией дифракции [22] повышается разрешающая способность в дальней зоне. Это объясняется тем, что фронт области дальнего поля, где пучок начинает расходиться, находится на расстоянии x, причем
 , (3.1)
, (3.1)где
 – длина УЗ-волны, d – размер апертуры.
– длина УЗ-волны, d – размер апертуры. Сравнение диаграмм направленности при различном числе входящих в группу элементов показывает, что длина волны не меняется, а расстояние до области дальнего поля пропорционально квадрату числа элементов в группе.
Н
а рис. 3.10 схематично показано влияние увеличения числа элементов в группе от одного до трех.
Рис. 3.10. Повышение разрешающей способности при использовании
группы из нескольких элементов по сравнению с одиночным элементом
При группе из трех элементов область дальнего поля начинается примерно в девять раз дальше от поверхности преобразователя и расходится на меньший угол по сравнению со случаем одного элемента. Однако, как видно из рис. 3.10 при группировании элементов несколько снижается разрешающая способность в ближней зоне.
При конструировании системы с линейной матрицей число элементов, объединяемых в группу, определяется исходя из требований к разрешающей способности прибора и глубине зондирования. В пределах группы все элементы можно соединять параллельно (т.е. они будут возбуждаться в одной фазе) или предусмотреть определенное смещение по фазе между отдельными элементами с целью повышения разрешающей способности в изображаемой плоскости. Поскольку распределение фаз вдоль активной группы элементов может оставаться одним и тем же независимо от того, в каком месте матрицы расположена данная группа, фокусировка при помощи фазирования элементов в исследуемой плоскости с целью повышения разрешающей способности не требует значительного усложнения электронной аппаратуры. На рис. 3.11 представлена структурная схема типичной УЗ-системы визуализации с линейной матрицей [22, 23].
Рис. 3.11. Структурная схема системы с В-сканированием и линейной
матрицей, иллюстрирующей принципиальную простоту схемы
Поскольку в большинстве линейных матриц электронная фокусировка фазированием не применяется, поперечная разрешающая способность таких систем, как правило, ниже, чем при ручном В- сканировании, тогда как их продольная разрешающая способность (определяемая длительностью акустического импульса) может быть такой же, как у систем с В-сканированием и ручным приводом. Как и в случае механической системы, работающей в реальном времени, частота кадров, глубина зондирования и число строк развертки – взаимосвязные параметры, но поскольку поперечная разрешающая способность ограничена, нет необходимости в большом числе строк развертки, так что обычно допускается высокая частота кадров. Большинство сканеров с линейной матрицей имеет от 64 до 128 строк и частоту кадров от 20 до 40 кадр/с. Такие приборы имеют небольшую массу и стоимость благодаря простоте электронных схем.
Сканеры с линейной матрицей, работающие в реальном времени, находят применение в акушерстве, в частности для определения беременности и слежения за ее ходом [24].
3.4. Системы с фазированной матрицей
Устройства с линейной фазированной решеткой – довольно широко распространенный тип контактных сканеров, работающих в реальном масштабе времени [25, 26]. Путем фазирования сигналов возбуждения, поступающих на отдельные элементы матрицы и снимаемых с этих элементов, можно обеспечить как требуемое отклонение пучка относительно поверхности матрицы, так и его фокусировку. В системах такого типа развертка имеет форму сектора, как показано на рис. 3.9, б. Приборы этого класса часто используются для визуализации сердца.
Термин «фазированная матрица» здесь употреблен не совсем корректно, т.к. для широкополосных сигналов угол наклона пучка и фокусировка фактически определяются относительной задержкой сигналов, создаваемых каждым элементом. Для изменения этой задержки применяются два устройства:
- Набор линий постоянной задержки, подключаемых к цепям, по которым проходит сигнал в соответствующие моменты времени и в определенной последовательности;
- Линии задержки с электронной регулировкой, в которых деятельность задержки плавно меняется при помощи соответствующего сигнала управления.
В серийной аппаратуре применяется оба указанных устройства, хотя электронное управление задержкой обладает большей гибкостью.
Структурная схема сканера с фазированной матрицей представлена на рис. 3.12. Поскольку такие системы требуют сложных линий задержки, стоимость их выше, чем сканеров с линейной матрицей.

Рис. 3.12. Система с фазированной матрицей
Поскольку каждой строке развертки соответствует только один излученный импульс, при излучении можно обеспечить только постоянную фокусировку на некоторый заранее заданной глубине или на фокальной линии, занимающей некоторый интервал глубин. Принимаемые сигналы, состоят из множества эхо-сигналов, приходящих с разных глубин в определенной временной последовательности. Таким образом, путем изменения задержки при приеме эхо-сигналов можно менять фокусировку по глубине в соответствии с залеганием точек, от которых отражаются эхо-сигналы [27]. При этом поперечная разрешающая способность становится выше разрешающей способности системы с фиксированным фокусным расстоянием.
3.5. Метод С-сканирования
Метод С-сканирования обеспечивает получение двумерного изображения объекта в прямоугольной системе координат. В отличие от метода В-сканирования, при котором одна из координат определяется временем прихода акустического импульса, при С-сканировании время не играет решающей роли.
Различают трансмиссионный вариант С-сканирования и эхо-импульсный вариант. В трансмиссионном варианте время не играет никакой роли, и изображение представляет собой теневую картину, напоминающую рентгеновские флюорографические изображения. Они имеют более привычный вид, чем изображение при В-сканировании и легче поддаются интерпретации, однако требуют двустороннего доступа и, следовательно, их реализация возможна лишь при наличии иммерсионной среды. При С-сканировании эхо-импульсами время лишь определяет расстояние до сканируемой плоскости. Для отображения на экране дисплея в этом случае используется только светящаяся точка из определенной глубины.
Методы С-сканирования в трансмиссионном и эхо-режимах дают разные изображения. Контрастность изображения, полученных в трансмиссионном режиме, зависит главным образом от градиентов коэффициента затухания ультразвука в ткани, а контрастность изображений полученных в эхо-режиме, – главным образом от изменений акустического импеданса.
На рис. 3.13 представлена структурная схема простой системы С-сканирования с механическим приводом работающей в эхо-импульсном режиме [28]. Импульсный генератор возбуждает преобразователь, который вырабатывает короткие импульсы сфокусированного ультразвука, проходящие через исследуемый объект. Полученные возмущенное УЗ-поле преобразуется в электрический сигнал приемным преобразователем; принятый сигнал сначала поступает на предусилитель, а затем на усилитель, работающий в режиме стробирования по дальности, который усиливает только акустический сигнал, распространяющийся по прямому пути (без переотражений). В дальнейшем стробированный по дальности сигнал обрабатывается, подвергается логарифмическому сжатию по амплитуде и полутоновому отображению. Следует отметить, что на формирование изображения, таким образом, уходит много времени.
Рис. 3.13. Структурная схема системы С-сканирования
3.6. Доплеровские методы
Если ультразвуком облучать движущийся отражатель, то частота отраженного сигнала будет отличаться от частоты излученного. Это явление называют эффектом Доплера, а величину изменения частоты, пропорциональную скорости движения отражателя – доплеровским сдвигом. Для многих физиологических процессов в организме человека характеризуемых движением, величина доплеровского сдвига находится в диапазоне звуковых частот. Это привело к созданию простых индикаторов пульса или скорости кровотока, в которых доплеровский сигнал подается в наушники или громкоговорители. Оператор с помощью такого прибора может на слух определить наличие перемещения какого-либо отражателя (или рассеивателя) на пути ультразвукового пучка, получить информацию о характере этого движения, позволяющую диагностировать некоторые заболевания, определять внутриутробное сердцебиение плода, вибрации стенок сосудов и др. [16].
Наибольший интерес представляет решение задачи регистрации и измерения параметров кровотока, при котором ультразвук рассеивается на форменных элементах крови.
Диагностические возможности ультразвуковых измерителей скорости кровотока весьма широки. В настоящее время доплеровские методы позволяют измерить не только среднюю скорость кровотока, но также и определить распределение скорости по сечению сосуда, профиль скоростей, обнаружить участки сужения кровеносных сосудов по ускорению кровотока, зарегистрировать кривую скорости артериального кровотока, используемую для диагностики заболеваний сосудов [29].
В настоящее время в медицине используется широкий спектр приборов, основанных на использовании эффекта Доплера. Комбинация В-сканера реального времени и импульсно-доплеровского устройства, называемого дуплексным сканером, используется для одновременной визуализации сосуда и регистрации кровотока. С помощью доплеровских приборов вычисляются объемный расход истока крови, контролируется работа сердечных клапанов, диагностируются закупорки сосудов, регистрируется направление кровотока. Широкому внедрению ультразвуковых доплеровских методов в медицинскую диагностику способствует бурный прогресс в техническом обеспечении метода, в частности совершенствование систем ввода и обработки отображаемой информации.
3.7. Теоретические основы использования эффекта Доплера
Если источник излучения и приемник движутся вдоль одной прямой со скоростями соответственно Vs и Vr , то частота сигнала на приемнике определяется выражением:
 , (3.2)
, (3.2)где fs – частота колебаний источника, с – скорость распространения излучения.
Отсюда получаем выражение для доплеровского смещения:
 , (3.3)
, (3.3)В ультразвуковой доплеровской локации обычно имеются неподвижный излучатель, неподвижный приемный преобразователь и движущийся отражатель.
При измерении скорости кровотока ультразвук рассеивается на флуктуациях плотности и сжимаемости, и принятый сигнал можно вычислить как сумму сигналов от всех элементов крови на пути ультразвукового пучка.
На рис. 3.14 показан случай одного рассеивателя, движущегося со скоростью V. Поскольку направление распространения падающей и рассеянной волн не совпадает с направлением движения элемента крови, уравнение (3.3) нельзя использовать непосредственно – необходимо заменить Vs и Vr составляющими этих скоростей вдоль направления приема и излучения. В этом случае, получаем следующее:
 , (3.4)
, (3.4)г

де Θt и Θr – углы между вектором скорости и направления излучения и приема соответственно, f0 – частота излучения.
Рис. 3.14. Схема распространения ультразвуковых пучков
в системе доплеровского контроля
Поскольку с ≈ 1500 м/с, а скорость V ≤ 1 м/с, справедливо приближение V << c; при этом
 , (3.5)
, (3.5)где
 есть угол между вектором скорости и биссектрисой угла между направлением излучения и приема,
есть угол между вектором скорости и биссектрисой угла между направлением излучения и приема,  – угол между самими этими направлениями.
– угол между самими этими направлениями.Обычно в зонде (датчике) совмещаются передающий и приемный преобразователь как это показано на рис. 3.15. При этом биссектриса угла совпадает с осью «измерительного объема», т.е. области перекрытия двух пучков. Зачастую
 – достаточно малый угол, так что приблизительно
– достаточно малый угол, так что приблизительно  , и поэтому из (3.5) получаем
, и поэтому из (3.5) получаем
. (3.6)
Рис. 3.15. Зонд
Выражения (3.5) и (3.6) показывают, что:
- Частота доплеровского сдвига
 пропорциональна частоте излучения. Увеличение затухания и возрастание мощности рассеянного сигнала с ростом частоты и ширины пучка делает оптимальным выбор диапазона
пропорциональна частоте излучения. Увеличение затухания и возрастание мощности рассеянного сигнала с ростом частоты и ширины пучка делает оптимальным выбор диапазона  МГц. При этом частоты доплеровского сдвига находятся в звуковом диапазоне;
МГц. При этом частоты доплеровского сдвига находятся в звуковом диапазоне;
- пропорциональна скорости движения отражателя (рассеивателя);
- обратно пропорциональна скорости ультразвука в биологической ткани;
- зависит от углов, образуемых вектором скорости с направлениями излучения и приема; в частности, при
 .
.
3.8. Ультразвуковые доплеровские диагностические устройства
Ультразвуковые доплеровские диагностические приборы можно условно разделить на две группы: доплеровские приборы непрерывного излучения и импульсно-доплеровские приборы. Блок-схема простейшего доплеровского прибора непрерывного излучения (ДПНИ) представлена на рис. 3.16 [16].

Рис. 3.16. Доплеровский прибор непрерывного действия
Передающий преобразователь (излучатель) соединен с генератором, работающим в диапазоне 2–20 МГц, и непрерывно излучает ультразвуковой пучок. Ультразвук рассеивается и отражается, а затем принимается приемником, усиливается и перемножается с сигналом генератора. Излученный сигнал представляет собой гармоническую волну
 , (3.7)
, (3.7)а сигнал, принятый от единичного отражателя, можно представить в виде
 , (3.8)
, (3.8)где
 ,
,  , а
, а  – величина фазы, определяемая расстоянием до рассеивателя и фазового сдвига в приемном тракте. Тогда сигнал на выходе перемножителя будет иметь вид
– величина фазы, определяемая расстоянием до рассеивателя и фазового сдвига в приемном тракте. Тогда сигнал на выходе перемножителя будет иметь вид .
.Второй член этого выражения имеет удвоенную частоту и отфильтровывается полосовым фильтром. Остается лишь доплеровский сигнал, т.е. сигнал с частотой доплеровского сдвига:
 . (3.9)
. (3.9)После усиления и фильтрации в соответствующей полосе частот доплеровский сигнал поступает на наушники, громкоговоритель или на частотомер.
Ультразвуковой сигнал, воспринимаемый приемным преобразователем, содержит не только сигналы, рассеянные на форменных элементах крови, но и сигналы гораздо большей амплитуды, отраженные от других структур, таких как границы жировой и мышечной ткани или стенки сосудов. Такие сигналы обычно на 40–50дБ превышают сигналы от кровотока, и это соотношение может быть еще большим при локации глубоко залегающих сосудов. Кроме того, эти мощные сигналы сами могут обладать низкочастотным доплеровским сдвигом, вызванным движением окружающих структур (например, движением пульсирующих артерий) или случайными смещениями зонда в руке оператора относительно неподвижных отражателей. Чтобы подавить эти мощные низкочастотные доплеровские сигналы, в усилитель низкой частоты (УНЧ) вводят фильтры верхних частот. Фильтрация необходима на входе усилителя или после небольшого предусиления, иначе сигналы будут смешиваться в усилителе. Неизбежный побочный эффект такой фильтрации – потеря низкочастотных доплеровских сигналов от медленного кровотока.
Чтобы ограничить ширину полосы УНЧ и тем самым свести к минимуму мощность флуктуационного шума, в усилитель вводят фильтры нижних частот, верхняя частота среза которых устанавливается равной максимальной ожидаемой доплеровской частоте, поскольку излишнее увеличение частоты среза может привести лишь к росту уровня шума.
Т.к. внутри измерительного объема существует распределение скоростей кровотока в поперечном сечении сосуда, т.е. рассеиватели могут двигаться с разными скоростями, доплеровский сигнал представляет собой суперпозицию доплеровских сигналов, частота каждого из которых соответствует скорости конкретного рассеивателя. Суммарный доплеровский сигнал при этом имеет сплошной спектр, а частотомер будет показывать лишь среднюю из этих частот. Если угол Θ известен, то, используя уравнение (3.5) или (3.6), можно преобразовать измеренную среднюю частоту в скорость. Эта скорость есть средневзвешенное по линиям тока, проходящим через измерительный объем. Вклад каждой линии тока в среднюю скорость пропорционален мощности ультразвука, рассеянной элементами крови вдоль данной линии, т.е. интегралу по линии тока от чувствительности в пучке (зависимости величины сигнала, принятого от точечного рассеивателя, от координат этого рассеивателя).
Если этот интеграл не изменяется по сечению сосуда, то измеренная скорость – средняя по пространству скорость кровотока. Условие постоянства интеграла часто называют условием равномерности облучения, что подразумевает постоянство интенсивности излучения по сечению сосуда, хотя в действительности это условие является более строгим.
Описанный выше прибор не позволяет выделять направление кровотока. Из выражений (3.5) и (3.6) следует, что доплеровское смещение положительно, если составляющая вектора скорости направлена к зонду, и отрицательно, если от зонда. Однако этот простейший прибор не сохраняет информацию о направлении кровотока, а дает лишь величину сдвига частоты. Информация о направлении необходима, чтобы следить за изменением скорости кровотока в течение кардиоцикла в тех сосудах, где возникает обратный кровоток, или если направление кровотока несет диагностическую информацию, например при исследовании вен при недостаточности сердечных клапанов.
Информацию о направлении можно сохранить различными способами [16]. Соответствующие устройства представлены на рис. 3.17.

б
в
Рис. 3.17. Методы выделения информации о направлении потока:
фильтрация боковых полос (а); демодуляция со сдвигом
несущей частоты (б); квадратурная демодуляция сигналов (в)
В первом из них (рис. 3.17, а) принятый высокочастотный сигнал пропускается через два фильтра, один из которых отсекает частоты ниже частоты излучения и пропускает сигналы с положительным доплеровским сдвигом вплоть до максимальной угловой частоты
 , а другой пропускает сигналы с отрицательным доплеровским сдвигом. Как и ранее, сигналы с выхода каждого из фильтров поступают на перемножители и усилители низкой частоты.
, а другой пропускает сигналы с отрицательным доплеровским сдвигом. Как и ранее, сигналы с выхода каждого из фильтров поступают на перемножители и усилители низкой частоты.В устройстве, показанном на рис. 3.17, б, принятый сигнал перемножается с опорным сигналом, смещенным на
 относительно частоты излучения. Спектр доплеровских сигналов при этом оказывается смещенным относительно истинного на величину
относительно частоты излучения. Спектр доплеровских сигналов при этом оказывается смещенным относительно истинного на величину  : при этом сдвиг
: при этом сдвиг  выглядит как
выглядит как  , а сдвиг
, а сдвиг  как
как  . Направление кровотока определяется взаимным расположением доплеровского сдвига и частоты смещения . Очевидно, частота должна быть выбрана выше наибольшего отрицательного доплеровского сдвига, а фильтр, отсекающий мощные паразитные сигналы, преобразуются здесь в полосовой режекторный фильтр с центральной частотой .
. Направление кровотока определяется взаимным расположением доплеровского сдвига и частоты смещения . Очевидно, частота должна быть выбрана выше наибольшего отрицательного доплеровского сдвига, а фильтр, отсекающий мощные паразитные сигналы, преобразуются здесь в полосовой режекторный фильтр с центральной частотой .Третья возможность построения прибора представлена на рис. 3.17, в. В этом случае принятый сигнал поступает на два перемножителя, на одном из которых опорный сигнал сдвинут на 90° относительно другого. Для первого перемножителя опорный сигнал можно представить в виде cos(0t), для второго – в виде -sin(0t). При этом синфазный сигнал i(t) аналогичен (3.9):
 ,
, а квадратурный сигнал описывается выражением
 .
.Знак доплеровского сдвига, а значит, и направление кровотока определяется по соотношению фаз i(t) и q(t). Если сдвиг
 положителен, то квадратурный сигнал отстает на 90° от синфазного, а если сдвиг – отрицателен, то опережает его.
положителен, то квадратурный сигнал отстает на 90° от синфазного, а если сдвиг – отрицателен, то опережает его.3.9. Импульсно-доплеровский измеритель скорости кровотока
Наиболее существенное ограничение ДПНИ – отсутствие пространственного разрешения, т.е. возможности разделить доплеровские сигналы из различных точек в пределах пучка. Если на пути пучка находятся два сосуда, то доплеровский сигнал представляет собой смесь сигналов от обоих сосудов. Невозможно также разделить и скорости в различных точках одного сосуда, т.е. измерять профиль скоростей.
Для решения этой задачи был создан импульсный измеритель скорости кровотока [16, 30], блок-схема которого представлена на рис. 3.18.
Рис. 3.18. Одноканальный импульсно-доплеровский прибор
Пространственное разрешение достигается благодаря периодическому излучению короткого (несколько колебаний) импульса ультразвука (частота повторений импульсов задается синхронизатором, а канал излучения открывается на время импульса) и использованию смесителя, в котором опорным сигналом служит задержанный во времени излученный сигнал (или эквивалентная «выборка» из принятого сигнала). Т.к. излучение и прием разнесены во времени, в зонде можно использовать один преобразователь. Такое устройство чувствительно к кровотоку лишь внутри некоторой области в пучке (в измерительном объеме). При этом время распространения излученного импульса до этого объема и обратно равно задержке между выборками излученного и принимаемого сигналов.
Таким образом, простым изменением задержки измерительный объем можно перемещать вдоль оси пучка и использовать это для раздельного наблюдения кровотока на различных глубинах или в различных точках по сечению сосуда. Ширина измерительного объема определяется шириной пучка, а длина – длительностью излучаемого импульса и временными характеристиками импульса, длительностью опорного импульса и временными характеристиками схемы смесителя. Следует отметить, что понятие «измерительный объем» довольно расплывчато. Поперек пучка и вдоль его оси чувствительность меняется постепенно, поэтому нельзя установить четкие границы измерительного объема, вне которого прибор полностью нечувствителен к кровотоку, а внутри чувствительность постоянна. Границы измерительного объема, показанные на рисунках 3.15, 3.16 больше соответствуют линиям равной чувствительности.
Средняя частота, измеренная импульсно-доплеровским прибором, – это среднее взвешенное значение по скоростям на линиях тока, проходящих через измерительный объем.
Описанный выше прибор – одноканальный, т.е. с одним измерительным объемом. Профиль скоростей в таком приборе измеряют, последовательно перемещая измерительный объем вдоль оси пучка и поперек кровеносного сосуда. Чтобы ускорить процесс съема информации, можно разработать прибор с несколькими одновременно выставляемыми измерительными объемами; каждый из них будет иметь свою задержку опорного сигнала, смеситель УНЧ, причем положение измерительных объемов будет определяться задержкой.