Интернет-экзамен в сфере профессионального образования
Специальность: 260601.65 – Машины и аппараты пищевых производств
Дисциплина: Механика (Теория механизмов и машин)
Время выполнения теста: 45 минут
Количество заданий: 17
Требования ГОС к обязательному минимуму
содержания основной образовательной программы
Индекс
|
Дисциплина и ее основные разделы
|
Всего часов
|
ОПД.Ф
|
Федеральный компонент
|
–
|
ОПД.Ф.02.02
|
Механика (Теория механизмов и машин) :
основные детали машин и их элементы; кинематические характеристики механизмов; проектирование кинематических схем рычажных механизмов; виды передаточных механизмов и их характеристики; статическая характеристика машинного агрегата и устойчивость его движения; силовой расчет механизмов без учета трения в кинематических парах; силовой расчет механизмов с учетом трения; виды зубчатых передач; эвольвентное зацепление, определение основных разеров зубчатого колеса; планетарные зубчатые механизмы и методы их кинематического анализа; кулачковые механизмы; статическое и динамическое уравновешивание механизмов и роторов; основы виброзащиты машин; промышленные роботы и манипуляторы.
|
119
|
Тематическая структура АПИМ
N ДЕ
|
Наименование
дидактической единицы ГОС
|
N за-
да-
ния
|
Тема задания
|
1
|
Строение механизмов
|
1
|
Основные понятия ТММ
|
2
|
Кинематические пары, кинематические цепи
|
3
|
Структурный анализ механизмов
|
4
|
Структурные группы звеньев. Структурный синтез
|
2
|
Кинематический анализ и синтез механизмов
|
5
|
Основные понятия кинематики механизмов
|
6
|
Кинематическое исследование механизмов (методом планов)
|
7
|
Синтез плоских стержневых механизмов по заданным кинематическим свойствам
|
8
|
Кинематический анализ зубчатых механизмов
|
3
|
Динамика механизмов
|
9
|
Основные понятия динамики механизмов
|
10
|
Режимы движения механизмов
|
11
|
Кинетостатический (силовой) расчет механизмов
|
12
|
Трение и КПД механизмов
|
13
|
Уравновешивание механизмов, вращающихся звеньев (роторов)
|
4
|
Синтез механизмов
|
14
|
Основные понятия и методы синтеза. Методы оптимизации в синтезе с применением ЭВМ
|
15
|
Синтез кулачковых механизмов
|
16
|
Синтез эвольвентного зацепления
|
17
|
Синтез планетарных механизмов. Дифференциальный механизм.
| Демонстрационный вариант
ЗАДАНИЕ N 1 (  - выберите один вариант ответа) - выберите один вариант ответа)
Механизмы, в состав которых входит звено, имеющее поверхность переменной кривизны, называются…
|
ВАРИАНТЫ ОТВЕТОВ:
1)
|
зубчатые
|
|
2)
|
рычажные
|
3)
|
винтовые
|
|
4)
|
фрикционные
|
5)
|
кулачковыми
|
|
|
|
|

|
ЗАДАНИЕ N 2 ( - выберите один вариант ответа)
Плоскостная кинематическая пара имеет…
|
ВАРИАНТЫ ОТВЕТОВ:
1)
|
три вращательных и одну поступательную степеней свободы
|
|
2)
|
одну вращательную и три поступательных степени свободы
|
3)
|
одну вращательную и две поступательных степени свободы
|
|
4)
|
две вращательных и одну поступательную степеней свободы
|
5)
|
одну вращательную и одну поступательную степени свободы
|
|
|
|
|
|
ЗАДАНИЕ N 3 ( - выберите один вариант ответа)
Число степеней свободы манипулятора равно…
|
ВАРИАНТЫ ОТВЕТОВ:
1)
|
W = 3
|
|
2)
|
W = 5
|
3)
|
W = 4
|
|
4)
|
W = 6
|
5)
|
W = 7
|
|
|
|
|
|
ЗАДАНИЕ N 4 ( - выберите один вариант ответа)
Класс структурной группы равен…
|
ВАРИАНТЫ ОТВЕТОВ:
|
|
ЗАДАНИЕ N 5 ( - выберите один вариант ответа)
Кинематический анализ механизма – это…
|
ВАРИАНТЫ ОТВЕТОВ:
1)
|
определение движения звеньев механизма по заданному движению начальных звеньев.
|
|
2)
|
определение движения звеньев механизма по приложенным к ним силам или определение сил по заданному движению звеньев.
|
3)
|
определение количества кинематических пар из которых составлен механизм.
|
|
4)
|
определение реакций действующих в кинематических парах механизма.
|
5)
|
определение уравновешивающей силы на входном звене механизма.
|
|
|
|
|
|
ЗАДАНИЕ N 6 ( - выберите один вариант ответа)
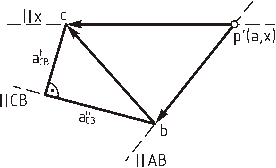
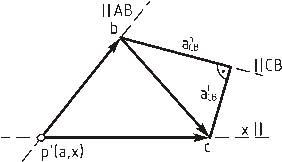
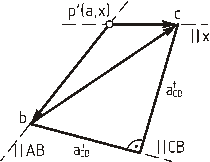
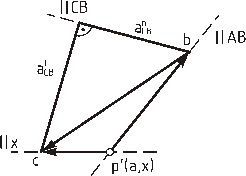
Верным планом ускорений для данного положения механизма (n1=const) является…

|
ВАРИАНТЫ ОТВЕТОВ:
|
|
ЗАДАНИЕ N 7 ( - выберите один вариант ответа)
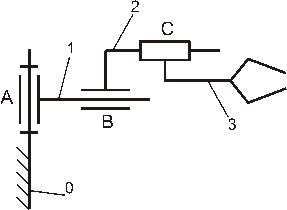
Механизм, воспроизводящий требуемую функциональную зависимость между перемещениями входных и выходных звеньев называется…
|
ВАРИАНТЫ ОТВЕТОВ:
1)
|
рычажным механизмом
|
|
2)
|
передаточным механизмом
|
3)
|
направляющем механизмом
|
|
4)
|
кулисным механизмом
|
5)
|
зубчатым механизмом
|
|
|
|
|
|
ЗАДАНИЕ N 8 ( - выберите один вариант ответа)
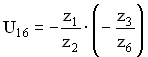
Передаточное число данного редуктора вычисляется по формуле…
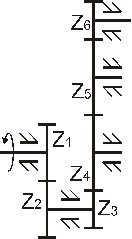
|
ВАРИАНТЫ ОТВЕТОВ:
|
|
ЗАДАНИЕ N 9 ( - выберите один вариант ответа)
Динамика механизмов изучает ...
|
ВАРИАНТЫ ОТВЕТОВ:
1)
|
движение звеньев механизмов под действием некоторой системы сил
|
|
2)
|
деформации звеньев механизмов, возникающие при их движении
|
3)
|
движение механизмов с геометрической точки зрения, без учета действующих сил
|
|
4)
|
методы расчета звеньев механизмов на прочность и жесткость
|
5)
|
строение механизмов
|
|
|
|
|
|
ЗАДАНИЕ N 10 ( - выберите один вариант ответа)
Установившимся движением механизма называется …
|
ВАРИАНТЫ ОТВЕТОВ:
1)
|
движение, при котором кинетическая энергия механизма убывает
|
|
2)
|
движение, при котором кинетическая энергия механизма возрастает
|
3)
|
движение, при котором кинетическая энергия механизма постоянна или является периодической функцией времени
|
|
4)
|
движение, при котором направление угловой скорости начального звена механизма не меняется
|
|
|
ЗАДАНИЕ N 11 ( - выберите один вариант ответа)
Силовой расчет механизмов, основанный на применении принципа Даламбера называется …
|
ВАРИАНТЫ ОТВЕТОВ:
1)
|
кинематическим
|
|
2)
|
кинетостатическим
|
3)
|
динамическим
|
|
4)
|
статическим
|
|
|
ЗАДАНИЕ N 12 ( - выберите один вариант ответа)
Внешним трением называется …
|
ВАРИАНТЫ ОТВЕТОВ:
1)
|
противодействие относительному перемещению соприкасающихся тел в направлении, лежащем в плоскости их соприкосновения
|
|
2)
|
противодействие относительному перемещению отдельных частей одного и того же тела при его деформации
|
3)
|
противодействие относительному перемещению соприкасающихся тел
|
|
4)
|
противодействие относительному перемещению соприкасающихся тел в направлении, нормальном к плоскости их соприкосновения
|
|
|
ЗАДАНИЕ N 13 ( - выберите один вариант ответа)
Ротором в теории уравновешивания называется …
|
ВАРИАНТЫ ОТВЕТОВ:
1)
|
любое тело, совершающее вращательное движение
|
|
2)
|
любое тело, совершающее поступательное движение
|
3)
|
любое тело, совершающее плоскопараллельное движение
|
|
4)
|
любое тело, для которого главный вектор и главный момент сил инерции не постоянны
|
|
|
ЗАДАНИЕ N 14 ( - выберите один вариант ответа)
Синтезом механизма называется …
|
ВАРИАНТЫ ОТВЕТОВ:
1)
|
проектирование схемы механизма по заданным его свойствам
|
|
2)
|
определение скоростей и ускорений точек звеньев механизма при заданном законе движения входного звена
|
3)
|
определение истинного закона движения входного звена при известной системе сил, действующих на звенья механизма
|
|
4)
|
определение сил реакций в кинематических парах
|
|
|
ЗАДАНИЕ N 15 ( - выберите один вариант ответа)
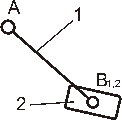
Звено 1 механизма, структурная схема которого приведена на рисунке, называется …
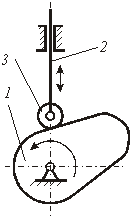
|
ВАРИАНТЫ ОТВЕТОВ:
1)
|
толкателем
|
|
2)
|
роликом
|
3)
|
кулачком
|
|
4)
|
коромыслом
|
|
|
ЗАДАНИЕ N 16 ( - выберите один вариант ответа)
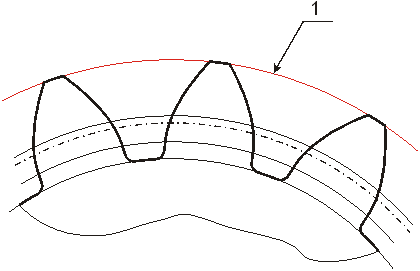
На рисунке изображено цилиндрическое эвольвентное зубчатое колесо. Окружность, обозначенная на рисунке цифрой 1, называется …
|
ВАРИАНТЫ ОТВЕТОВ:
1)
|
окружностью вершин
|
|
2)
|
окружностью впадин
|
3)
|
делительной окружностью
|
|
4)
|
начальной окружностью
|
5)
|
основной окружностью
|
|
|
|
|
|
ЗАДАНИЕ N 17 ( - выберите один вариант ответа)
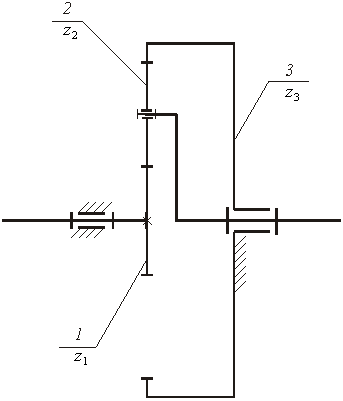
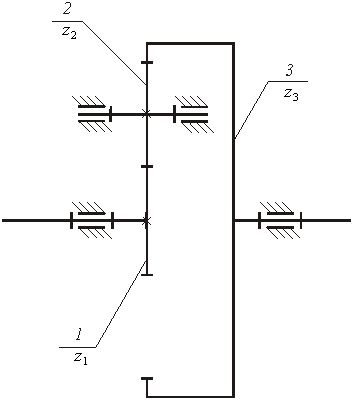
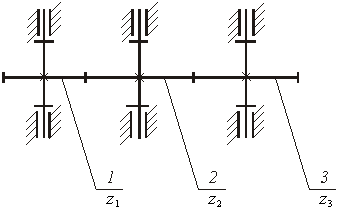
Укажите схему планетарного зубчатого механизма
|
ВАРИАНТЫ ОТВЕТОВ:
|
|
|
|