
Курс обучения 4-й семестр 8 Факультет заочного образования Количество тестовых заданий для предоставления тестируемому
| Вид материала | Инструкция |
- Курс лекций для студентов заочного и очно-заочного образования рпк «Политехник», 941.31kb.
- Перечень тестовых заданий к государственному экзамену для студентов специальности «Финансы, 120.22kb.
- Методы подготовки тестов по информатике и программированию, 55.02kb.
- Перечень тестовых заданий к государственному экзамену для студентов специальности «Финансы, 145.2kb.
- Курс, группа у-5360, срок обучения 4 года 4 месяца, осенний семестр 2007-2008 учебного, 158.22kb.
- Курс: 5 Форма обучения: очная Семестр: 10 Количество часов 90 Количество аудиторных, 216.85kb.
- Курс 1,2 Семестры 1,2,3 Итоговая форма контроля экзамен 2,3 семестр Смоленск 2009, 248.08kb.
- Факультет Бизнес Факультет (ФБ) Кафедра Учета и статистики Курс Семестр рабочая учебная, 299.05kb.
- Эразмусовцы бгсха в Чехии Баярма Бадмаева, 4 курсс (изкиМ) и Владимир Мушталев, 4 курс, 206.19kb.
- Методические указания к выполнению индивидуальных заданий для студентов дневного, 229.08kb.
УТВЕРЖДАЮ
Заведующий кафедрой
«Оборудования и автоматизации
производства» Ю.К.Калугин
___________________________
(подпись)
«____» _____________ 20 ___г.,
протокол № ___________
Тестовые задания для входного компьютерного тестирования
По дисциплине «Теория автоматического управления технологическими системами»
для специальности: 1–36 01 03 Технологическое оборудование машиностроительного производства
Курс обучения 4-й семестр 8
Факультет заочного образования
Количество тестовых заданий для предоставления тестируемому :
Закрытой формы:
Задания на выбор одного верного ответа: 109
Задания на выбор нескольких верных ответов: 3
Составил:
Преподаватель кафедры
«Оборудование и автоматизация
производства» С.А. Кудрицкий
Инструкция
Тестовые задания составлены в количестве 112 шт. Входной контроль знаний студентов проводится перед экзаменом с целью выявления степени подготовленности и освоения материала дисциплины.
Студент отвечает на 10 вопросов, выбранных компьютером. Для допуска к экзамену студенту необходимо ответить на 6 вопросов, т.е. на 60%.
Раздел 1. Математические основы исследования систем автоматического управления
Тема 1. Общая характеристика линейных систем автоматического управления
- Управление объектом– это
а) устройство, задающее программу изменения управляющего воздействия;
б) воздействие без участия человека;
в) воздействие на него в целях достижения требуемых состояний или процессов;
г) поддержание определенного закона изменения одной или нескольких физических величин.
- Автоматическое управление - это управление объектом
а) без помощи технических средств без участия человека;
б) с помощью технических средств без участия человека;
в) без помощи технических средств с участия человека;
г) с помощью технических средств с участия человека.
- Системой автоматического управления – это совокупность
а) объектов управления и средств автоматизированного управления;
б) задающих устройств и средств автоматического управления;
в) объектов управления и средств автоматического управления;
г) задающих устройств и средств автоматизированного управления.
- Основная задача автоматического управления - поддержание определенного закона изменения
а) управляемой величины;
б) задающей величины;
в) возмущающей величины;
г) выходной величины.
- Управляющим воздействием называется воздействие, прикладываемое к
а) управляющему органу объекта с целью поддержания требуемых значений управляемой величины;
б) задающему органу объекта с целью поддержания требуемых значений управляемой величины;
в) управляющему органу объекта с целью поддержания требуемых значений управляющей величины;
г) задающему органу объекта с целью поддержания требуемых значений управляющей величины.
- Задающим устройством (ЗУ) называется устройство, задающее программу изменения … воздействия
а) управляемого;
б) управляющего;
в) возбуждающего;
г) возмущающего.
- Принцип суперпозиции, заключается в том, что сумме любых возмущений соответствует ...
а) сумма выходных реакций;
б) сумма квадратов выходных реакций;
в) корень суммы выходных реакций;
г) корень суммы квадратов выходных реакций.
- Типовые возмущения
а) единичная скачкообразная функция, единичная импульсная функция, единичная линейная функция, единичное гармоническое колебание;
б) единичная скачкообразная функция, единичная импульсная функция;
в) единичная линейная функция, единичное гармоническое колебание;
г) единичная скачкообразная функция, единичная импульсная функция, единичная линейная функция.
- Условно графическое обозначение единичной скачкообразной функции
а)
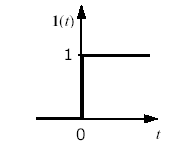
б)
в)
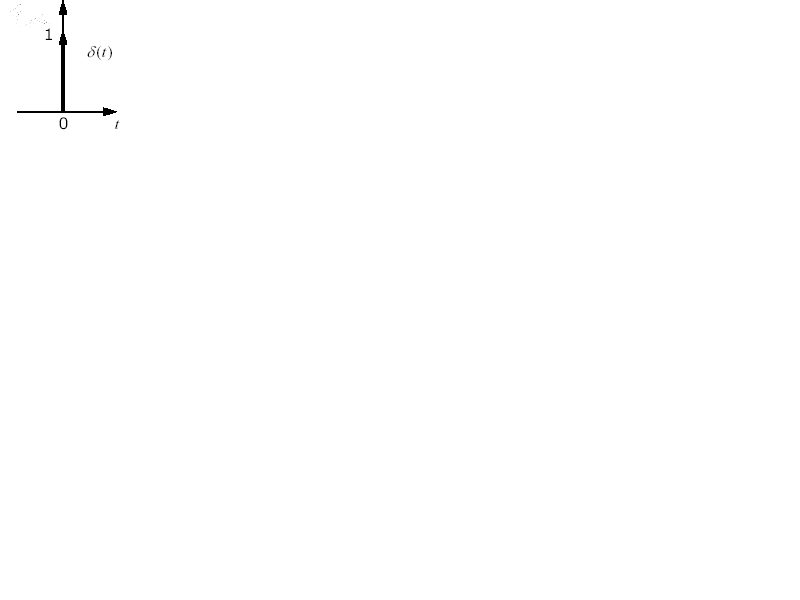
- Условно графическое обозначение единичного импульса
а)
б)
в)
- Реакция объекта на … называется переходной функцией
а) единичный импульс;
б) гармонический сигнал;
в) единичный скачек;
г) прямоугольный сигнал
- Реакция объекта на … называется весовой функцией
а) единичный импульс;
б) гармонический сигнал;
в) единичный скачек;
г) прямоугольный сигнал
13. Система автоматизированного управления
а) в которой функции управления делятся между машиной и человеком
б) выполняющая функции контроля объектов управления
в) осуществляющая основной процесс без участия человека
г) осуществляющая управление наилучшим образом
д) реагирующая на возмущающие воздействия
14. Управление, осуществляемое в условиях имеющихся ограничений наилучшим образом, называется
а) оптимальным
б) робастным
в) автономным
г) многомерным
д) стационарным
15. Частная задача управления, состоящая в отработке задающего воздействия без выбора характера этого воздействия, называется
а) регулирование
б) измерение
в) контроль
г) компенсация
д) д-разбиение
16. Функция r(t) называется
а) задающим воздействием
б) управляющим воздействием
в) возмущающим воздействием
г) ошибкой регулирования
д) управляемой величиной
17. Функция e(t) называется
а) ошибкой регулирования
б) задающим воздействием
в) возмущающим воздействием
г) управляющим воздействием
д) управляемой величиной
18. Функция u(t) называется
а) управляющим воздействием
б) задающим воздействием
в) возмущающим воздействием
г) ошибкой регулирования
д) управляемой величиной
19. Функция у(t) называется
а) управляемой величиной
б) задающим воздействием
в) возмущающим воздействием
г) ошибкой регулирования
д) управляющим воздействием
20. Функция f(t) называется
а) возмущающим воздействием
б) задающим воздействием
в) управляющим воздействием
г) ошибкой регулирования
д) управляемой величиной
Тема 2. Математическое описание линейных САУ ТС.
- Режим работы САУ, в котором управляемая величина и все промежуточные величины не изменяются во времени.
а) не установившийся;
б) статический;
в) стохастический;
г) динамический.
- Процесс … требуемого значения управляемой величины называется регулированием.
а) регулирования;
б) стабилизации;
в) установления;
г) интерполирования.
- Линеаризация уравнений динамики – это процесс преобразования
а) гармонических уравнений в линейные;
б) линейных уравнений в нелинейные;
в) нелинейных уравнений в гармонические;
г) процесс преобразования нелинейных уравнений в линейные.
- Формы записи дифференциальных уравнений
а) операторная;
б) дифференциальная;
в) в изображениях Лапласа;
г) произвольная.
- Нули передаточной функции - корни
а) передаточной функции;
б) числителя;
в) знаменателя;
г) производной передаточной функции.
- Полюса передаточной функции - корни
а) передаточной функции;
б) числителя;
в) знаменателя;
г) производной передаточной функции.
- Функция передачи последовательно соединенных звеньев равна
а) произведению функций звеньев по прямому пути
б) дроби, знаменатель которой равен произведению функций по контуру
в) сумме функций звеньев по прямому пути
г) сумме функций звеньев по контуру
д) дроби, знаменатель которой равен сумме функций звеньев по контуру
28. Чему равна функция передачи параллельно соединенных звеньев?
а) сумме функций звеньев по прямому пути
б) произведению функций звеньев по прямому пути
в) дроби, знаменатель которой равен произведению функций по контуру
г) сумме функций звеньев по контуру
д) дроби, знаменатель которой равен сумме функций звеньев по контуру
Раздел II. Характеристики и элементы САУ ТС.
Тема 1. Частотные и временные характеристики САУ ТС.
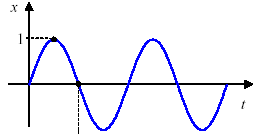
- Условно графическое обозначение гармонического сигнала
а)
б)
в)
- Частотная характеристика звена,
а) W(jω);
б) A(ω);
в) φ(ω);
г) y(ω).
- Амплитудная частотная характеристика звена
а) W(jω);
б) A(ω);
в) φ(ω);
г) y(ω).
- Фазовая частотная характеристика звена
а) W(jω);
б) A(ω);
в) φ(ω);
г) y(ω).
- По форме АЧХ различают основные типы звеньев:
а) фильтр низких частот;
б) фильтр высоких частот;
в) полосовой фильтр;
г) полосовой режекторный фильтр.
- Диаграмма Боде
а) ЛАЧХ и ЛФЧХ;
б) ЛАЧХ и АЧХ;
в) АЧХ и ФЧХ;
г) ЛФЧХ и ФЧХ.
35. Функция передачи последовательно соединенных звеньев равна
а) произведению функций звеньев по прямому пути
б) дроби, знаменатель которой равен произведению функций по контуру
в) сумме функций звеньев по прямому пути
г) сумме функций звеньев по контуру
д) дроби, знаменатель которой равен сумме функций звеньев по контуру
36. Как называется типовое воздействие, имеющее изображение по Лапласу 1/s?
а) единичный скачок
б) кривая разгона
в) единичная гармоника
г) единичный импульс
д) линейная функция
37. Как называется реакция на типовое воздействие 1(t)?
а) переходная функция
б) кривая разгона
в) передаточная функция
г) частотная функция
д) импульсная функция
38. Как называется реакция на типовое воздействие
 ?
?а) весовая функция
б) переходная функция
в) передаточная функция
г) частотная функция
д) кривая разгона
Тема 2. Соединение звеньев.
- Позиционное звено – звено, имеющее
а) не конечный ненулевой коэффициент усиления гармонического сигнала;
б) конечный ненулевой коэффициент усиления гармонического сигнала;
в) конечный нулевой коэффициент усиления постоянного сигнала;
г) конечный ненулевой коэффициент усиления постоянного сигнала.
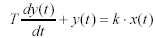
40. Апериодическое звено описывается дифференциальным уравнением
а)
б)
в)
г)

- Колебательное звено описывается дифференциальным уравнением
а)
б)
в)
г)
- Интегрирующее звено описывается дифференциальным уравнением
а)
б)
в)
г)
- Дифференцирующее звено описывается дифференциальным уравнением
а)
б)
в)
г)
44. Звено
 называется
называетсяа) консервативным
б) астатическим
в) инерционным
г) колебательным
д) пропорциональным
45. Звено, у которого скорость изменения выходной величины пропорциональна входной величине, называется
а) нейтральным
б) пропорциональным
в) инерционным
г) колебательным
д) консервативным
46. Звено, которое на всех частотах создает отставание выходного сигнала относительно входного по фазе на -90, называется
а) интегрирующим
б) пропорциональным
в) инерционным
г) дифференциальным
д) запаздывающим
47. Звено, выходная величина которого в каждый момент времени пропорциональна входной величине, называется
а) усилительным
б) астатическим
в) апериодическим первого порядка
г) дифференциальным
д) форсирующим
48. Звено, реакция которого на скачок является экспоненциальной функцией, называется
а) апериодическим первого порядка
б) астатическим
в) усилительным
г) дифференциальным
д) форсирующим
49. Значение времени, отсекаемое на линии установившегося значения касательной к переходной характеристике инерционного звена, восстановленной из начала координат, называется
а) постоянной времени
б) временем регулирования
в) временем установления
г) временем нарастания
д) временем запаздывания
50. АФЧХ консервативного звена представляет собой
а) прямую линию
б) эллипс
в) треугольник
г) многоугольник
д) круг
51. АФЧХ дифференцирующего звена представляет собой
а) прямую линию
б) эллипс
в) треугольник
г) многоугольник
д) круг
52. АФЧХ интегрирующего звена представляет собой
а) прямую линию
б) эллипс
в) точку
г) многоугольник
д) круг
53. АФЧХ безинерционного звена представляет собой
а) точку
б) эллипс
в) круг
г) многоугольник
д) прямую линию
54. Весовой функцией называется
а) реакция на единичный импульс при нулевых начальных условиях
б) реакция на единичный импульс
в) реакция на единичный скачок при нулевых начальных условиях
г) реакция на единичный скачок
д) реакция на входное воздействие
55. Звено
 называется
называетсяа) инерционным
б) астатическим
в) пропорциональным
г) колебательным
д) консервативным
56. Если на всех частотах от 0 до бесконечности
 , этому соответствует звено
, этому соответствует звеноа) запаздывающее
б) интегрирующее
в) дифференцирующее
г) пропорциональное
д) консервативное
57.Единицы измерения функции
 по оси ординат ЛАЧХ
по оси ординат ЛАЧХа) децибелы
б) ангстремы
в) октавы
г) градусы
д) декады
58. Единицы измерения частоты по оси абсцисс ЛЧХ
а) декады
б) децибелы
в) градусы
г) ангстремы
Тема 3. Принципы и виды управления.
59. Принцип разомкнутого управления
а) программа управления задана ОУ; управление не учитывает влияние возмущений на параметры процесса золотниковые;
б) программа управления жестко задана ЗУ; управление не учитывает влияние возмущений на параметры процесса золотниковые;
в) программа управления жестко задана ЗУ; управление учитывает влияние возмущений на параметры процесса.
60. Требования к управлению
а) точность;
б) устойчивость;
в) качество переходных процессов;
г) робастность.
61. Система, задающее воздействие которой не изменяется во времени, называется
а) стабилизирующей
б) следящей
в) программной
г) оптимальной
д) разомкнутой
62. Система, задающее воздействие которой является известной функцией времени, называется
а) программной
б) следящей
в) стабилизирующей
г) оптимальной
д) замкнутой
63. Система, задающее воздействие которой является произвольной функцией времени, называется
а) следящей
б) стабилизирующей
в) программной
г) оптимальной
д) робастной
Тема 4. Обратные связи.
64. Обратной связью называется
а) путь от выхода ко входу системы
б) путь, на котором сигналу присваивается обратный знак
в) непрерывная последовательность направленных звеньев
г) последовательность звеньев, образующая замкнутый контур
д) любой путь, если его сигнал вычитается из входного сигнала
65. Система, имеющая главную обратную связь, называется
а) замкнутой
б) следящей
в) программной
г) оптимальной
д) стабилизирующей
66. Обратная связь, не создающая задержку или опережение сигнала во времени, называется
а) жесткой обратной связью
б) гибкой обратной связью
в) положительной обратной связью
г) отрицательной обратной связью
д) паразитной обратной связью
67. Главная обратная связь отсутствует в системах с управлением
а) по возмущению
б) по отклонению
в) по отклонению и производным отклонения
г) по отклонению и интегралу отклонения
д) комбинированным
Тема 5. Расчет передаточной функции.
68. Что называется полюсами передаточной функции?
а) корни полинома знаменателя передаточной функции
б) корни полинома числителя передаточной функции
в) корни, обозначаемые на комплексной плоскости крестиком
г) корни, обозначаемые на комплексной плоскости кружком
д) значения переменной, обращающие полином в ноль
69. Чему равен коэффициент усиления системы в установившемся режиме при стандартной форме записи дифференциального уравнения и ступенчатом входном воздействии?
а)
б)
в)
г)
E)
70. Что называется нулями передаточной функции?
а) корни полинома числителя передаточной функции
б) точки, обозначаемые на комплексной плоскости крестиком
в) корни полинома знаменателя передаточной функции
г) точки, обозначаемые на комплексной плоскости кружком
71. Что является оригиналом передаточной функции?
а) импульсная функция
б) переходная функция
в) реакция на начальные условия
г) частотная функция
д) кривая разгона
72. Отношение преобразований Лапласа выходной и входной величин системы при нулевых начальных условиях называется
а) передаточной функцией
б) переходной функцией
в) системной функцией
г) импульсной функцией
д) весовой функцией
Раздел III. Анализ устойчивости САУ ТС.
Тема 1. Устойчивость САУ.
73. Устойчивая система на которую не действуют внешние сигналы
а) техническая
б) механическая
в) математическая
г) автономная
74. Система устойчива, если
а) все корни знаменателя передаточной функции лежат слева от мнимой оси
б) все корни числителя передаточной функции лежат слева от мнимой оси
в) все корни числителя передаточной функции лежат справа от мнимой оси
г) все корни знаменателя передаточной функции лежат справа от мнимой оси
д) ни один корень передаточной функции не лежит на мнимой оси
75. Система устойчива, если
а) при свободном движении система возвращается в исходное состояние равновесия
б) при свободном движении ее переходный процесс не имеет колебательной составляющей
в) при свободном движении система не возвращается к исходному состоянию равновесия
г) при свободном движении система стремится к новому состоянию равновесия
д) при свободном движении ее переходный процесс имеет колебательный характер
76. Условие положительности всех коэффициентов характеристического уравнения является необходимым и достаточным для устойчивости систем
а) не выше второго порядка
б) первого порядка
в) второго порядка
г) выше второго порядка
д) нулевого порядка
Тема 2. Критерии устойчивости.
77. По разомкнутой системе судят об устойчивости замкнутой в критерии
а) Найквиста
б) Гурвица
в) Михайлова
г) Рауса
78. Теорему Ляпунова применяют для оценки:
а) «технически» устойчивостой системы
б) внутренней устойчивости линейных систем
в) устойчивости линеаризованных систем
г) нейтрально устойчивой системы
79. Критерий Гурвица является
а) алгебраическим
б) интегральным
в) частотным
г) корневым
д) характеристическим
80. Кривая Михайлова строится
а) по характеристическому уравнению системы
б) по комплексному коэффициенту передачи системы
в) по передаточной функции системы
г) по нулям и полюсам передаточной функции
д) по изображению импульсной функции
81. Условия, позволяющие оценить положение полюсов системы на комплексной плоскости без вычисления их значений, это
а) критерии устойчивости
б) степень устойчивости
в) показатели качества
г) запасы устойчивости
д) способы нормирования
82. Для анализа устойчивости системы по критерию Найквиста используется
а) ЛЧХ
б) ФЧХ
в) МЧХ
г) АФЧХ
д) АЧХ
83. При изменении частоты
 от нуля до бесконечности кривая Михайлова устойчивой системы n-го порядка проходит
от нуля до бесконечности кривая Михайлова устойчивой системы n-го порядка проходита) последовательно против часовой стрелки n квадрантов комплексной плоскости
б) против часовой стрелки n квадрантов комплексной плоскости
в) последовательно по часовой стрелке n квадрантов комплексной плоскости
г) по часовой стрелке n квадрантов комплексной плоскости
д) через начало координат
84. Система n-го порядка находится на периодической границе устойчивости, если при изменении частоты от нуля до бесконечности кривая Михайлова проходит
а) через начало координат
б) против часовой стрелки n квадрантов комплексной плоскости
в) последовательно по часовой стрелке n квадрантов
г) последовательно против часовой стрелки n квадрантов
д) по часовой стрелке n квадрантов комплексной плоскости
85. Система n-го порядка находится на апериодической границе устойчивости по критерию Михайлова, если графики четной и нечетной функций
а) начинаются в одной точке
б) пересекаются при одинаковой частоте
в) пересекают ось частот поочередно
г) не пересекают ось частот
д) имеют n пересечений с осью частот
86. Система находится на периодической границе устойчивости по критерию Михайлова, если графики четной и нечетной функций
а) пересекаются при одинаковой частоте
б) начинаются в одной точке
в) пересекают ось частот поочередно
г) не пересекают ось частот
д) имеют n пересечений с осью частот
87. Система устойчива по критерию Михайлова, если графики четной и нечетной функций
а) пересекают ось частот поочередно
б) пересекаются при одинаковой частоте
в) начинаются в одной точке
г) не пересекают ось частот
д) имеют n пересечений оси частот
88. Для анализа устойчивости замкнутой системы по критерию Найквиста строят на комплексной плоскости при изменении частоты
от 0 до  годограф
годографа) комплексного коэффициента передачи разомкнутой системы
б) передаточной функции разомкнутой системы
в) знаменателя передаточной функции разомкнутой системы
г) комплексного коэффициента передачи системы
д) правильная формулировка отсутствует
89. Если годограф комплексного коэффициента передачи не охватывает точку на комплексной плоскости с координатами [-1, j0], система
а) устойчива в замкнутом состоянии
б) устойчива
в) неустойчива
г) устойчива в разомкнутом состоянии
д) находится на границе устойчивости
90. Если АФЧХ разомкнутой системы начинается в точке на комплексной плоскости с координатами [-1, j0], замкнутая система
а) находится на апериодической границе устойчивости
б) устойчива
в) находится на периодической границе устойчивости
г) указанный случай невозможен
д) неустойчива
91. Разница между значением минус 180 и значением ЛФЧХ на частоте среза называется
а) запасом устойчивости
б) фазовой характеристикой
в) степенью устойчивости
г) перерегулированием
д) колебательностью N
92. Если система замкнута, то для анализа её устойчивости в этом состоянии по критерию Найквиста перед построением АФЧХ систему нужно
а) разомкнуть
б) замкнуть
в) оставить в нынешнем состоянии
г) найти число правых корней характеристического уравнения
д) найти число левых корней характеристического уравнения
93. По критерию Михайлова число правых корней характеристического уравнения системы равно
а) числу неправильных пересечений кривой Михайлова с осями координат
б) числу пересечений кривой Михайлова с действительной осью
в) числу пересечений кривой Михайлова с мнимой осью
г) числу пересечений кривой Михайлова с осями координат
д) правильная формулировка отсутствует
94. беличина, показывающая, насколько коэффициент усиления системы при
 меньше единицы, называется
меньше единицы, называетсяа) запасом устойчивости
б) частотой среза
в) степенью устойчивости
г) перерегулированием
д) колебательностью
95. Частотой среза называется частота
а) на которой усиление или ослабление системы отсутствует
б) соответствующая началу координат при построении ЛаЧХ
в) соответствующая перелому асимптотической ЛаЧХ
г) соответствующая началу низкочастотной асимптоты
д) соответствующая концу низкочастотной асимптоты
Раздел IV. Синтез САУ ТС.
Тема 1. Качество линейных САУ
96. Прямые оценки качества определяют по
а) переходным характеристикам
б) траекториям корней
в) частотным характеристикам
г) импульсным характеристикам
д) разности площадей реального и образцового переходного процессов
97. Прямыми оценками качества называются показатели качества, определяемые
а) по переходной характеристике
б) по передаточной функции
в) по импульсной характеристике
г) по весовой характеристике
д) по частотной характеристике
98. Время от начала процесса до момента пересечения переходной характеристикой линии установившегося значения называется
а) временем нарастания
б) временем максимума
в) временем регулирования
г) временем успокоения
д) временем разгона
99. Максимальное отношение мнимой части корня к действительной в корневом методе оценки качества называется
а) степенью колебательности
б) запасом устойчивости по амплитуде
в) степенью устойчивости
г) запасом устойчивости по фазе
д) показателем затухания
100. Минимально-фазовым называется звено
а) все нули и полюса которого левые
б) все нули которого левые
в) все полюса которого левые
г) у которого все корни характеристического уравнения имеют отрицательную действительную часть
д) у которого при левых полюсах имеются правые нули
101. Качество системы в установившемся режиме определяется
а) величиной отклонения от заданного значения
б) длительностью отклонения от заданного значения
в) устойчивостью системы
г) колебательностью системы
д) начальным значением ошибки регулирования
102. Доминирующим называется корень (пара корней), лежащий
а) слева от мнимой оси и ближайший к ней
б) справа от мнимой оси и ближайший к ней
в) наибольшее абсолютное значение действительной части
г) наименьшее абсолютное значение действительной части
д) на мнимой оси
103. В корневом методе оценки качества степень колебательности позволяет найти
а) перерегулирование
б) запас устойчивости по фазе
в) запас устойчивости по амплитуде
г) время регулирования
д) запаздывание
Тема 2. Понятие о синтезе САУ ТС
104. Для построения ЛАФЧХ звеньев со сложными и передаточными функциями их числитель разбивают на сомножества:
а) первого и четвертого порядка
б) второго и третьего порядка
в) третьего и четвертого порядка
г) первого и второго порядка
105. Единица отсчета в логарифмической оси частот:
а) единица
б) триада
в) декада
г) квартал
106. Звенья, передаточные функции которых имеют ноли или полюса в правой полуплоскости, т.е. с положительной вещественной частью.
а) максимально-фазовые
б) неминимально-фазовые
в) немаксимально-фазовые
г)минимально-фазовые
107. Для исследования качества систем регулирования не используют воздействие типа
а) единичный импульс
б) скачок ускорения
в) скачок скорости
г) скачок положения
д) гармонические колебания
108. По максимальному относительному забросу переходной характеристики за линию установившегося значения определяют
а) перерегулирование
б) время установления
в) колебательность
г) время регулирования
д) установившуюся ошибку
109. Закон линейного регулирования не используется в САР
а) Д
б) И
в) П
г) ПИ
д) ПД
110. Какой из перечисленных регуляторов имеет остаточную неравномерность (статизм)?
а) П
б) И
в) ПИД
г) ПИ
111. Для коррекции характеристик САР не применяют
а) запаздывающие устройства
б) параллельные устройства
в) инвариантные устройства
г) неединичную обратную связь
д) последовательные устройства
112. Величина статической ошибки пропорциональна (укажите неверный ответ)
а) величине коэффициента усиления системы
б) величине коэффициента статизма
в) величине входного воздействия
г) величине коэффициента передачи по каналу ошибки
д) величине статизма системы