Секретариат программы «Шаг в будущее» Почтовый адрес
| Вид материала | Документы |
СодержаниеМолодежь решает проблемы энергетического кризиса МГТУ им. Н.Э. Баумана Электропривод гибридного автомобиля Робототехника сегодня и завтра |
- Программы «Шаг в будущее Инникигэ хардыы» Начальникам муниципальных управлений образования, 359.34kb.
- Приказ 28. 10. 2011 №164-7/о Об итогах XVIII научно-практической конференции «Шаг, 108.32kb.
- Программы «Шаг в будущее», 114.31kb.
- Российской научно-социальной программы для молодежи и школьников «Шаг в будущее» общие, 219.31kb.
- Положение о школьной конференции учебно-исследовательских работ обучающихся 1-11 классов, 140.62kb.
- Курс: Телефон (с кодом города): Факс (если есть): Почтовый адрес вуза: Почтовый адрес, 7.01kb.
- Программа для молодёжи и школьников «шаг в будущее», 263.02kb.
- Секретариат Государственного Собрания Курултая Республики Башкортостан Почтовый адрес:, 2679.85kb.
- Рекомендация на конференцию, 294.1kb.
- Доклада, 78.31kb.
Литература:
Молодежь решает проблемы энергетического кризиса Белова Ольга Владимировна, кандидат технических наук, доцент кафедры «Вакуумная и компрессорная техника» МГТУ им. Н.Э. Баумана Никогда раньше перед человечеством так остро не стояла проблема обеспечения планеты энергоресурсами. Численность населения мира удвоилось с 1950-х годов и вырастет еще на 50% к 2050 году. История показывает, что когда люди становятся богаче, они используют больше энергии. Численность населения и ВВП1 быстро растут в странах, не входящих в ОЭСР2, а Китай и Индия сейчас только в начале восходящей кривой энергопотребления. Развивающиеся страны, включая Китай и Индию с их гигантским населением, вступают в фазу экономического роста, требующую наибольшего количества энергии. Они индустриализируются, создают инфраструктуру и увеличивают использование транспортных средств. Неуклонно растущий спрос будет способствовать поиску альтернативных источников и более эффективному использованию энергии. Но чтобы полностью снять напряженность, вызванную ростом спроса на энергоносители, этих мер будет недостаточно. Основное внимание этого мероприятия направлено на экономию топлива, что весьма актуально в эпоху все возрастающего спроса на энергоносители, сомнений относительно будущих поставок и волнений по поводу изменения климата. Несмотря на то, что добыча традиционных углеводородов в мировом масштабе ограничена, потребности транспорта неуклонно растут. Например, в Китае уже сегодня имеется 40 миллионов автомобилей. По оценкам Китайского министерства коммуникаций, к 2020 году их число может возрасти до 140 миллионов. Для снабжения этих автомобилей топливом потребует дополнительно 2 – 3 миллиона баррелей нефти в сутки, что приблизительно равно современной потребности Германии, четвертого крупнейшего в мире потребителя нефти. Как я могу повлиять на то, чтобы избежать энергетического кризиса? Каждый ответственный политик и бизнесмен должен задавать себе этот вопрос. Этот вопрос должен беспокоить и каждого из нас. И только объединяя усилия, мы можем избежать печального сценария, и создать собственный - оптимистичный. Примером такого решения служит «Экомарафон Шелл» – соревнование экомобилей, в котором необходимо проехать максимально большое расстояние при наименьшем расходе топлива. «Шелл»3 - вторая по величине компания в мире. Она занимается добычей и переработкой нефти и газа. Однако, стратегия компании, связанная с решением проблем обеспечения энергоресурсами, привела к открытию «Шелл» производств солнечных батарей и иных альтернативных источников энергии. Соревнование «Экомарафон Шелл» зародилось в 1939 г. как дружеское пари между учеными компании «Шелл» в Иллинойсе (США), которые поспорили о том, чья машина расходует наименьшее количество топлива. Соревнование стало проходить каждый год. В 1977 году Шелл организовала соревнование «Экомарафон Шелл» специально для студенческих команд Великобритании. С 1985 года соревнование юных конструкторов стало проводиться и в Европе (рис. 1). Уже из Европы «Экомарафон Шелл» вернулся на американский континент как молодежное соревнование. 2010 – год, когда марафон стартует в Азии. С 8 по 10 июля на трассе близ столицы Малайзии, города Куала-Лумпур, где проходят также гонки Формулы-1, более 100 команд из различных стран Азии и Среднего Востока покажут свои достижения в области проектирования эко-автомобилей.
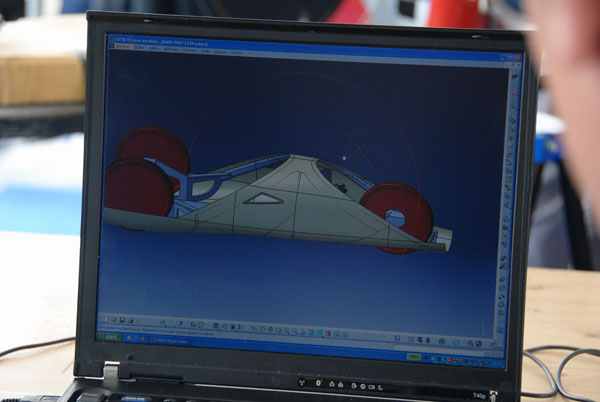
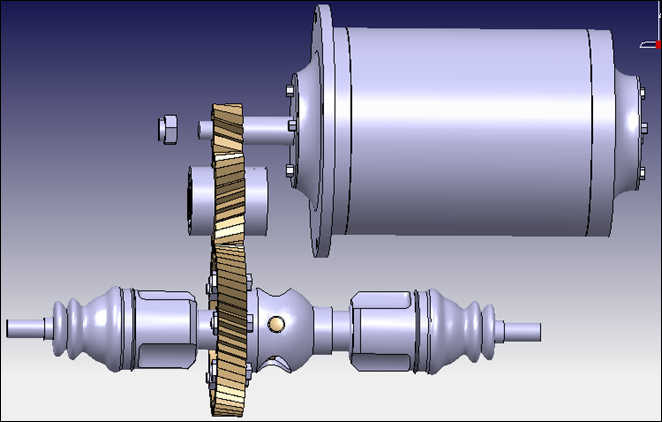
«Экомарафон Шелл» дает возможность самым талантливым молодым изобретателям сконструировать, построить и испытать на треке автомобили, способные проехать несколько тысяч километров на одном литре условного топлива. Кто же является участниками соревнования в наше время? Дело в том, что свои автомобили представляют студенты, ученики колледжей и даже школьники. Это соревнование ставит перед ними задачу проектирования, строительства и управления предельно экономичным автомобилем. Оно дает также практический опыт, который поможет им успешно начать свою профессиональную карьеру. Таким образом, смысл Эко-марафона заключается также в воспитании нового поколения технических специалистов, которые окажут помощь при поиске решений, отвечающих потребностям общества в энергии. В течение ближайших 5 – 10 лет все большее число опытных инженеров научно-технических компаний будут приближаться к пенсионному возрасту. В то же время количество молодых выпускников технических специальностей сокращается, поскольку популярность научных дисциплин падает. В настоящее время в Азии технические учебные заведения заканчивает почти столько же студентов, сколько в Европе и в США вместе взятых. Дефицит талантливых инженеров на Западе заставляет компании привлекать выпускников из богатых талантами стран, таких как Россия, Индия, и Китай. Правила соревнований позволяют использовать в качестве топлива бензин, дизельное топливо, этанол, водород или электроэнергию. Независимо от того, что выберут участники, энергетическим эквивалентом топлива служит литр 95-го бензина Shell. Количество иного топлива, равного литру бензина, высчитывают организаторы соревнований. Получается, что прототип, затративший, например, на десять двухкилометровых кругов 0,02 литра дизельного топлива, на одном литре бензина покрыл бы расстояние в 896 километров. В чем секрет столь невероятной экономичности? В первую очередь, в легкости — в среднем машинки весят всего по 30—35 кг. На какие только ухищрения не идут авторы для облегчения своих машин! Однако, по правилам минимальная скорость автомобилей не может быть ниже 30 километров в час. Участники для облегчения экомобилей применяют совершенно разные материалы, в том числе инновационные композитные материалы. Здесь используются высокие технологии, которые применяются и при изготовлении машин для Формулы-1. Несомненно, чтобы изготовить такой эко-болид, не обойтись без современных компьютерных технологий. Многие фирмы, специализирующиеся на разработке программного обеспечения твердотельного моделирования и подготовки геометрической модели изделия для изготовления с помощью прототипирования, помогают молодым освоить их продукты и применить для создания своих моделей. Так, фирма Dassault Systèmes поддерживает Парижский технический университет прикладных наук (Ecole Nationale Superieure d’Arts et Metirs). С помощью пакета CATIA v5 Студенты школы спроектировали и изготовили свои эко-мобили, чтобы ставить рекорды экономичности (рис. 2, 3).
В России уже есть примеры сотрудничества студентов в проектировании автомобилей. Завершен совместный Международный Российско-Французский студенческий проект «Разработка цифровой компьютерной модели электромобиля» (январь-июнь 2008 г.). Студенты Томского политехнического университета совместно со студентами Версальского технического университета (UIT Mantes en Yvelines) спроектировали автомобиль для японских улиц Nekocar (рис. 4, 5). Студенты из России занимались проектированием электрического привода автомобиля, а французские – трудились над внешним видом автомобиля и внутренним интерьером. Проектирование в CATIA v5 позволяет вести работу над одним проектом, когда исполнители находятся в разных концах света. Большой потенциал участия в Эко-марафоне несомненно есть и в России. И в первую очередь у сегодняшних школьников, занимающихся научно-исследовательской и проектной деятельностью, которые в дальнейшем станут студентами технических ВУЗов. Сотрудничество Dassault Systèmes и МГТУ им. Н.Э.Баумана, я уверена, также принесет результат в области подготовки кадров и создания новых технологий для решения проблем энергетического кризиса.
Литература: 1. [Электронный ресурс] Shell energy scenarios to 2050: ссылка скрыта. 2. [Электронный ресурс] ENSAM and the Shell Eco-Marathon: ссылка скрыта. 3. [Электронный ресурс] NEKOCAR project: ссылка скрыта. 4. [Электронный ресурс] Томский региональный центр информатизации: ссылка скрыта ЭЛЕКТРОПРИВОД ГИБРИДНОГО АВТОМОБИЛЯ НАУМОВ Валерий Николаевич, доктор технических наук, профессор, первый заместитель заведующего кафедрой «Многоцелевые гусеничные машины и мобильные роботы» МГТУ им. Н.Э.Баумана, лауреат премии Президента РФ в области образования Повышение средней скорости движения транспортного средства и улучшение топливной экономичности двигателя являются актуальными задачами в области транспортного машиностроения. Решение первой из задач связано с установкой на машину двигателя большей мощности или с совершенствованием агрегатов трансмиссии и движителя. Однако, увеличение мощности энергетической установки приводит к повышенному расходу топлива и снижению загрузки двигателя. Кроме того, разработка нового двигателя связана с большими затратами. Ресурсы улучшения характеристик агрегатов трансмиссии и движителя ограничены, и их использование в настоящее время не может привести к существенному улучшению тягово-динамических параметров машины. Принципиально новым путем, позволяющим решить обе поставленные задачи, является применение на транспортном средстве накопителей энергии. В нашей стране и за рубежом проводятся исследовательские и опытно-конструкторские работы по созданию и применению на транспортных средствах различных типов накопителей энергии (электрических, гидравлических, пневматических и механических). Случайный характер воздействия внешней среды на транспортную машину приводит к неустановившимся режимам, характеризующимся резкими колебаниями скорости машины под влиянием факторов обстановки движения, а также колебаниями сил тяги на движителе. В то же время, движение машины по городу характеризуется постоянным чередованием фаз разгона, равномерного движения, торможения и стоянки с работающим двигателем. В этих режимах или требуется большой расход энергии при разгоне автомобиля или энергия переводится в тепло при торможении. С развитием гибридного автотранспорта, в котором наряду с механическим потоком мощности используются электрические параллельные или последовательные потоки, накопители электрической энергии выходят на первый план. Использование электрических накопителей позволяет запасать энергию от основного источника (дизель-генераторная установка) при работе его с недогрузкой в легких условиях движения и отдавать ее тяговым электродвигателям в тяжелых условиях движения автомобиля (при разгоне, при движении по слабым грунтам, при движении в гору), а также, накопитель позволяет запасать рекуперированную электродвигателями энергию торможения транспортного средства. В качестве накопителей электрической энергии могут использоваться различные комбинации аккумуляторных батарей и конденсаторов большой емкости. Однако разработка таких устройств должна вестись для конкретного типа тягового электропривода, используемого на гибридном транспорте. Одним из основных требований, предъявляемых к тяговому электроприводу (ТЭП), является минимизации размеров и массы и достижение высоких энергетических показателей, что имеет первостепенное значение для электромобилей с автономным источником энергии соизмеримой мощности. Тяговые электрические машины в ТЭП обеспечивают реализацию заданной предельной и частичных тяговых характеристик электромобиля, т. е. зависимости тягового усилия F на ведущих колесах от скорости движения v при номинальной свободной мощности Nce (для предельной характеристики) и мощности Nce< Nce.н - для частичных. Из существующих на данный момент электроприводов, с помощью которых можно реализовать тяговую характеристику электромобиля, выделим три основные типа: электропривод (ЭП) с использованием двигателя постоянного тока с последовательным возбуждением (ДПТ ПВ), ЭП с использованием асинхронного двигателя с частотным регулированием (АД ЧР) и вентильно-индукторный привод (ВИП). ЭП с на электрическом транспорта используется давно и получил широкое применение. К недостаткам использования ДПТ в автономном транспорте можно отнести их большую массу и наличие коллекторного узла, который сложен в изготовлении и ремонте. В последнее время в качестве регулируемого электропривода все повсеместно применяется АД ЧР. Этот способ обеспечивает непрерывное регулирование скорости АД в широком диапазоне, при этом не происходит увеличения его скольжения, что обуславливает невысокий уровень потерь скольжения, свойственных как отмечалось выше только этому виду ЭП. Однако для обеспечения высоких энергетических показателей необходимо наряду с частотой изменять и уровень подводимого напряжения. Рациональный закон изменения напряжения при этом зависит от характера изменения нагрузки. В области пониженных частот напряжение снижается для обеспечения максимального момента равном номинальному и сохранения перегрузочной способности АД на прежнем уровне. В области повышенных частот напряжение остаётся постоянным, а момент снижается с ростом частоты. В начале 80-х годов в иностранной научно-технической информации появились материалы о новом типе электрического привода SRD - Switched Reluctance Drive [2]. С тех пор лавинообразно нарастает количество докладов на эту тему на различных конференциях, статей в журналах, постоянно увеличивается число институтов и фирм, участвующих в разработке различных проектов в области SRD. В последние годы за рубежом (Германия, Великобритания, Швеция, Италия, США, Австралия, Япония и др.) многими университетами, исследовательскими центрами и фирмами ведутся интенсивные разработки этого типа электропривода для различных областей применений. Он состоит из очень простой, дешевой и надежной электрической машины с неодинаковым числом явновыраженных полюсов на статоре и роторе и электронного коммутатора - электрического преобразователя с развитым микропроцессорным управлением. По основным мае со габаритным и энергетическим показателям вентильно-индукторный привод (ВИП) не уступает, а по ряду показателей даже превосходит, например, прекрасно отработанный и широко применяемый частотно-регулируемый асинхронный электропривод. Некоторые конструктивные и функциональные особенности ВИП - отсутствие каких-либо обмоток на роторе, имеющем меньший, чем у обычных машин, момент инерции, простые, легко сменяемые катушечные обмотки статора, большие моменты при низких скоростях, гибкое управление скоростью и моментом, достаточно простая реализация тормозных режимов и т.п. - делают этот привод весьма привлекательным как для широких общепромышленных и транспортных применений, так и для специальных высокоскоростных или высокомоментных электроприводов. Особенность ВИП состоит в применении индукторного двигателя с различным числом полюсов статора и зубцов на роторе (как правило в пределах 4.*..12). ВИП, судя по зарубежным публикациям, обладает комплексом свойств, выгодно отличающих его от существующих аналогов и определяющих возможность его использования в качестве массового регулируемого электропривода нового поколения. Из прогноза фирмы Motorola на развитие приводов разных типов на ближайшие годы следует, что тенденция развития ВИП резко возрастает, АД ЧР возрастает, но в меньшей степени, а тенденция развития ДПТ убывает. Простота исполнения ВИП, высокая технологичность, низкая стоимость и надежность машины, возможность создания простого и надежного коммутатора на современной элементной базе, функциональная гибкость и высокие энергетические показатели делают этот привод весьма перспективным для широкого применения в различных отраслях современной техники, в том числе и на автономном транспорте. Литература: 1. Электрические машины в тяговом автономном электроприводе/Андреев Ю.М., Исаакян К.Г., Машихин А.Д., и др.; Под ред. А.П. Пролыгина. М.: Энергия, 1979. 240 с. ил. 2. Бычков М.Г. Вентильно-индукторный электропривод - электропривод будущего // Энергоменеджер. Зима, 1997. Вып. 5. С. 27-29. РОБОТОТЕХНИКА СЕГОДНЯ И ЗАВТРА Ющенко Аркадий Семенович, доктор технических наук, профессор, заведующий кафедрой «Робототехнические системы» МГТУ им. Н.Э.Баумана Робототехника как научное и техническое направление формировалось начиная с середины шестидесятых годов прошло века и прошло несколько этапов в своем развитии. Начало внедрения роботов сопровождалось эйфорией исследователей и инженеров. Казалось, что уже скоро промышленность будет полностью роботизирована, промышленные роботы повсеместно заменят человека при выполнении тяжелых и опасных работ. Человеку же останутся лишь творческие задачи, в том числе, связанные с разработкой новых интеллектуальных систем. В 60 – 70 х г.г. были созданы многочисленнее образцы промышленных роботов, получившие значительное распространение в промышленности. К числу первых можно отнести американские роботы Юнимейт, Версатран (1962 г.), которые применялись, в основном, для загрузки станков, прессов. В дальнейшем роботы непрерывно совершенствовались, появились такие модели как «Puma» (финская фирма NOKIA), роботы шведской фирмы АBB (ASEA), которые можно было применять уже для более тонких операций, таких как металлообработка и сборка. Получили широкое внедрение в автомобильной промышленности сварочные роботы немецкой фирмы «KUKA». К концу 90-х г.г. парк промышленных роботов в мире превысил 1 млн. шт., причем на первое место по производству и применению роботов уверенно заняла Япония. Заметим, что в СССР также уделялось большое внимание развитию робототехники. В конце 80-х г.г. существовала государственная программа роботизации производства. В Москве, в Минске, в Смоленске были развернуты проектные институты и производства промышленных роботов. Были созданы образцы роботов, не уступающие западным аналогам. В 80-х г.г. складывается отечественная школа научной робототехники, в создание которой внесли значительный вклад и ученые МВТУ им. Н.Э.Баумана – академик РАН Е.П.Попов, профессора Н.А.Лакота, В.С.Кулешов. В 1982 г. в нашем университете был создан Научно-учебный центр и кафедра робототехники, которую возглавил Е.П.Попов. Несмотря на очевидный прогресс в роботизации промышленности, ожидаемой революции в этой области не произошло. Успешно автоматизировать удалось только простые, монотонно выполняемые операции, такие как загрузка станков, сварка кузовов автомобилей, покраска и т.п. При выполнении более сложных операций, например, при вытачивании сложной детали на токарном станке, или при сборке узла человек проявляет качества, которые не были заложены в робототехническую систему – глазомер, опыт, тактильные ощущения, наконец, способность принимать мгновенные решения, как-то корректировать свои движения в зависимости от текущей ситуации. Здесь находился первый серьезный рубеж, для преодоления которого робототехнике понадобилось десятилетие. Новым этапом стали адаптивные робототехнические системы, способные самостоятельно приспосабливаться к конкретным особенностям работы. В их основе лежат информационно-сенсорные системы роботов, включающие датчики и компьютерные системы обработки сигналов. Прежде всего, это системы технического зрения, затем системы силового очувствления, системы тактильного очувствления, информационные системы, позволяющие мобильному роботу ориентироваться в окружающем пространстве и находить нужный путь к цели. Иными словами, второй этап развития робототехники – это обретение роботами «чувств», или, по крайней мере, ощущений. Сегодня промышленные роботы обычно оснащаются системами технического зрения, позволившими существенно расширить круг выполняемых операций. Используются малогабаритные телекамеры, ультразвуковые датчики препятствий, лазерные сканирующие дальномеры. Манипулятор, оснащенный зрением, может найти нужную деталь и захватить ее, где бы она ни находилась на рабочем столе или конвейере. Манипулятор, снабженный датчиками сил, может осуществить сборку, например, вставить вал во втулку, не повредив детали. Мобильный транспортный робот «робокар» может самостоятельно перемещаться по цеху и доставлять детали и инструмент со склада к определенным станкам, причем он во время обнаружит неожиданное препятствие, например, человека, пересекающего его путь, и выполнит обходной маневр. Стало возможным создавать полностью роботизированные цеха, в которых человек стал наладчиком оборудования, программистом и контролером, наблюдающим за работой роботов. Именно так сегодня выглядят современные автомобилестроительные производства в Европе, США и Японии. Такие производства создаются и в России. Примером может служить автомобильное предприятие «Соллерс» в Набережных Челнах. К сожалению, большая часть робототехнического оборудования для таких предприятий сейчас либо закупается за рубежом, либо производится на филиалах предприятий зарубежных робототехнических фирм, развернутых в РФ. Задача сегодня состоит в том, чтобы восстановить место России на рынке промышленной робототехнической продукции, разрабатывать и производить свои роботы, учитывающие особенности применения и использующие свою элементную базу. А для этого нам нужно новое поколение специалистов в области робототехники, соответствующее сегодняшнему уровню науки и техники. МГТУ им. Н.Э.Баумана должен внести свой вклад в решение этой общегосударственной задачи. Возвращаясь к истории становления и развития робототехники, нужно сказать, что одновременно с появлением промышленных роботов начали применяться и дистанционно управляемые манипуляторы, которые не были роботами, так как управлялись человеком-оператором. Такие манипуляторы применялись, например, для работы с радиоактивными и химическими веществами, опасными для человека. При этом человек находился в одном помещении, а манипулятор – в другом, а именно в опасной зоне. Исполнительный механизм таких манипуляторов был сходен с механизмом промышленных роботов, хотя был более совершенен и скорее напоминал руку человека. Отметим, что первая книга по проектированию таких манипуляционных систем «Динамика систем управления манипуляторами» была написана учеными МВТУ им. Н.Э.Баумана Н.А.Лакотой и В.С.Кулешовым в 1971 г. В дальнейшем в нашем университете были разработаны и системы, позволяющие человеку-оператору ощущать силы и моменты, возникающие при взаимодействии дистанционно управляемого манипулятора с объектами рабочей зоны – так называемые системы двустороннего действия. Эти работы были первым этапом целого направления в истории робототехники, которое можно назвать дистанционно-управляемыми робототехническими системами. Такая система обычно представляет собой перемещающуюся платформу, снабженную манипулятором и дистанционно управляемую человеком, который контролирует ее движение либо при непосредственном наблюдении, либо с помощью телекамер, размещенных на самой платформе. В МГТУ им. Н.Э.Баумана было создано специальное конструкторско-технологическое бюро робототехники, основной продукцией которого и являются дистанционно управляемые робототехнические системы. Они нашли широкое применение при работе со взрывоопасными предметами, при ликвидации последствий аварий и катастроф, при спасательных операциях, выполняемых подразделениями МЧС. Подобные робототехнические системы разрабатываются и в ГосНИИ физико-технических проблем. Примером удачной конструкции, разработанной здесь, является робот «Богомол». В Институте проблем механики РАН разрабатываются дистанционно управляемые роботы, перемещающиеся по вертикальным поверхностям. В последнее время такие работы ведутся и в нашем университете. Одной из наиболее интересных разработок в области робототехники с нетрадиционными способами перемещения является шагающий робот, разработанный на кафедре гидравлики МГТУ им. Н.Э.Баумана. Еще одна область применения дистанционных роботов – подводные исследования. Это могут быть изыскания полезных ископаемых на морском шельфе, или спасательно-поисковые работы. И здесь нужно отметить значительный вклад ученых МГТУ им. Н.Э.Баумана в разработку подводных роботов. Разрабатываются манипуляторы космического базирования, которыми оснащаются долговременные космические станции. Эксплуатация дистанционно управляемых роботов выявила их серьезные недостатки. Строго говоря, эти технические системы вообще нельзя называть роботами. Обычно предполагается, что робот способен к самостоятельным действиям. В данном же случае, всеми перемещениями как манипулятора так и платформы управляет человек. Это очень сложная и трудоемкая работа. Она усложняется дефицитом информации, получаемым человеком, как правило, с помощью телекамеры, дающей плоское изображение сцены (в то время как работа происходит в трехмерном пространстве). Задача, которая сегодня стоит перед разработчиками подобных систем состоит в том, чтобы на базе хорошо отработанных конструкций дистанционно управляемых робототехнических систем создать действительно роботов, способных к самостоятельному поведению в заранее неизвестных условиях, целью которого является решение задач, поставленных человеком. Именно такие задачи решаются на кафедре «Робототехнические системы» МГТУ им. Н.Э.Баумана факультета «Робототехника и комплексная автоматизация». Какие проблемы стоят перед разработчиками автономных роботов сегодня? Прежде всего, это задачи, которые относят к проблемам искусственного интеллекта. Робот, используя собственную сенсорную систему (техническое зрение, дальномеры, локаторы, тактильные датчики и т.п.), должен правильно оценить окружающую обстановку, определить собственное положение на электронной карте. Для решения последней задачи в робототехнике все чаще используются системы космической навигации – ГЛОНАС и GPS. После этого робот должен составить план своих действий с учетом текущей обстановки и задачи, поставленной оператором. Это как бы «верхний», стратегический уровень управления. Далее управление осуществляется на «нижнем», тактическом уровне, который реально управляет движением, используя информационно-сенсорную систему для адаптации к текущей обстановке – обходя препятствия, преодолевая спуски и подъемы, реагируя на подвижные объекты в поле зрения робота. При этом предполагается, что контакт с человеком осуществляется на уровне сообщений на профессионально-ориентированном языке, близком к естественному. Сообщения передаются как от человека к роботу, так и в обратном направлении. Например, с целью уточнения команд, с сообщениями о предполагаемых планах действий, об изменении ситуации и т.д. Таким образом, управление приобретает форму диалога между человеком и роботом. Заметим, что основатель отечественной научной робототехники академик Е.П.Попов сформулировал принципы диалогового управления 20 лет тому назад. Только сегодня мы подошли к их практической реализации. Мы преодолеваем второй рубеж робототехники – создание автономных, интеллектуальных роботов. Как и много лет тому назад нам кажется, что этот рубеж - последний, роботы уже завтра войдут в нашу жизнь, начнут реально помогать нам в выполнении всех видов работ, которые мы им можем доверить. При этом мы сможем общаться с роботами на естественном языке без всякой предварительной подготовки. Однако практика показывает, что возникнут и третий и четвертый барьеры, которые придется преодолевать уже новому поколению исследователей. Единственно, в чем можно быть уверенным, это в том, что прогресс неизбежен и мечта человечества об искусственных людях-помощниках рано или поздно будет осуществлена в полной мере. В последнее время возникло несколько новых направлений в робототехнике. Прежде всего, это направление микромеханики и микроробототехники. Современная технология позволяет реализовать все элементы робота в миниатюрном исполнении. Так, могут быть изготовлены электродвигатели с внешним диаметром статора 1-2 мм, таких же размеров гироскопические датчики, датчики давления и температуры и другие элементы. При этом размеры робота могут измеряться несколькими сантиметрами. Это обстоятельство позволяет использовать робототехнику в совершенно новых областях. Важнейшей из них является медицина. Например, вводя микроробототехническое устройство в кровеносный сосуд, можно провести диагностику его внутреннего состояния и, при необходимости, провести хирургическую операцию внутри сосуда, не разрушая окружающие его ткани. Микророботы могут быть летающими; группа таких роботов может проводить мониторинг окружающей среды, например, при опасности возникновения лесных пожаров или химического загрязнения воздушной среды. Аналогичные задачи могут быть возложены на плавающих роботов. Здесь мы приходим еще к одной новой проблеме, которую можно определить как распределенное, или используя современный термин, «многоагентное» управление роботами, т.е. управление группой робототехнических устройств, решающих одну задачу и при этом взаимодействующих между собой. Наиболее простым примером такого управления может быть игра роботов в футбол, когда роботы взаимодействуют между собой, но у каждого из них своя тактика достижения общей цели – забить мяч в ворота противника. В настоящее время проходят как национальные, так и международные соревнования по виртуальному футболу, в которых целью, конечно, является не сам футбол, а именно возможности организации группового управления роботами. В более серьезной простановке это может быть задача коллективного управления группой роботов, занятых ликвидаций техногенной аварии, спасательными работами. В последнее время начала складываться и научная база многоагентного управления. На нашей кафедре начата подготовка специалистов по этой специализации. Обратим внимание на тот факт, что так или иначе любая робототехническая система ориентирована на взаимодействие с человеком. Для того чтобы обеспечить «взаимопонимание» между человеком и роботом, система знаний робота, способы его логического «мышления» должны быть, в известной степени, подобны системе знаний и логике человека для того, чтобы между ними мог поддерживаться диалог в процессе работы. В свою очередь, восприятие внешнего мира роботом должно быть согласовано с так называемыми психофизиологическими шкалами органов чувств человека. Таким образом, возникает еще одно направление, которое можно обозначить как «эргономика робототехнических систем», затрагивающая такие аспекты как «чувства», «эмоции» и, в более широком смысле, психологию как человека, взаимодействующего с роботами, так и самих роботов. |