
 Авторефераты по всем темам >>
Авторефераты по техническим наукам
Авторефераты по всем темам >>
Авторефераты по техническим наукам
Методология создания локальной системы позиционирования подразделений пожарной охраны МЧС России на основе ретрансляции сигналов глобальной навигационной системы ГЛОНАСС
Автореферат докторской диссертации по техническим наукам
| Страницы: | 1 | 2 | 3 | |
Во второйа главе 2 Разработка методов обработки ретранслированных сигналов для определения координат мобильных объектов пожарной охраны МЧС России апредложены алгоритмы обработки ретранслированных сигналов для определения координат мобильных объектов. Показано, что организация приема прямых и ретранслированных сигналов ГНСС одновременно на несколько разнесенных в пространстве наземных измерительных пунктов (НИП) позволяет сократить число навигационных космических аппаратов (НКА), необходимых для определения координат потребителя.
Основным содержанием навигационной задачи (НЗ) в ГНСС является определение вектора состояния потребителя. В качестве компонент этого вектора обычно рассматривают пространственные координаты ![]() апотребителя, временная поправка
апотребителя, временная поправка ![]() ашкалы времени потребителя, относительно системной шкалы, а также составляющие вектора скорости
ашкалы времени потребителя, относительно системной шкалы, а также составляющие вектора скорости ![]()
![]() . Существенно, что перечисленные величины не могут быть непосредственно измерены радиотехническими методами. Поэтому в навигационной аппаратуре потребителя (НАП) ГНССа реализован косвенный метод: измеряются некоторые параметры принятого радиосигнала - время его прихода t, фаза j или разность фаз
. Существенно, что перечисленные величины не могут быть непосредственно измерены радиотехническими методами. Поэтому в навигационной аппаратуре потребителя (НАП) ГНССа реализован косвенный метод: измеряются некоторые параметры принятого радиосигнала - время его прихода t, фаза j или разность фаз ![]() , доплеровский сдвиг частоты Fд, которым сопоставляются функционально связанные с ними величины: дальность
, доплеровский сдвиг частоты Fд, которым сопоставляются функционально связанные с ними величины: дальность ![]() адо НКА, его радиальная скорость Vr, разность дальностей
адо НКА, его радиальная скорость Vr, разность дальностей ![]() адо нескольких НКА, угол визирования f, угловая скорость W и т.п., по которым и рассчитываются искомые компоненты вектора состояния.
адо нескольких НКА, угол визирования f, угловая скорость W и т.п., по которым и рассчитываются искомые компоненты вектора состояния.
В системах ГЛОНАСС и GPS используются в основном дальномерный (псевдодальномерный) и радиально-скоростной методы измерений. В качестве подвижных опорных радионавигационных точек (ОРНТ) используются НКА. В этом случае радионавигационными параметрами являются время распространения (задержка) ![]() асигнала на трассе НКА - потребитель и доплеровское смещение частоты (ДСЧ)
асигнала на трассе НКА - потребитель и доплеровское смещение частоты (ДСЧ) ![]() . Соответствующая им дальность НКА - потребитель R или радиальная скорость потребителя относительно НКА Vr - являются навигационными параметрами, а связывающие их навигационные функции в данном случае имеют вид:
. Соответствующая им дальность НКА - потребитель R или радиальная скорость потребителя относительно НКА Vr - являются навигационными параметрами, а связывающие их навигационные функции в данном случае имеют вид:
![]() ,аа
,аа ![]() .аа а(1)
.аа а(1)
В качестве основных позиционных методов определения координат в ГНСС второго поколения в НАП обычно используются псевдодальномерный или разностно-дальномерный методы, а для получения составляющих вектора скорости потребителя применяют псевдорадиально-скоростной (псевдодоплеровский) метод. Использование более простого дальномерного метода навигационных определений нецелесообразно из-за отсутствия в большинстве моделей НАП ГНСС компактных и дешевых высокостабильных эталонов времени (частоты).
Использование ретрансляции сигналов НКА расширяет число позиционных методов, подходящих для решения НЗ, по сравнению с традиционными методами решения задач координатно-временных определений в ГНСС.
Очевидно, что основными методами для решения НЗ по ретранслированным сигналам НКА ГНСС останутся различные варианты дальномерных измерений.
Для случая совместного использования прямых и ретранслированных сигналов НКАа общий вид системы уравнений для псевдодальномерных совместных измерений по прямым и ретранслированным сигналам НКА имеет вид:
![]() ,
,
![]() ; аа а(2)
; аа а(2)
![]() ,
, ![]() .
.
Когда система (2) решается относительно координат j-го ретранслятора ![]() , то прямые измерения
, то прямые измерения ![]() , не зависящие от положения потребителя, в принципе могут не проводиться. Однако включение в НИП каналов приема сигналов непосредственно от НКА позволяет эффективно использовать их в качестве независимого источника вспомогательных данных. Например, для выделения служебной информации от НКА, синхронизации нескольких НИП, определения координат подвижного НИП, а также для организации режимов относительных (дифференциальных) измерений.
, не зависящие от положения потребителя, в принципе могут не проводиться. Однако включение в НИП каналов приема сигналов непосредственно от НКА позволяет эффективно использовать их в качестве независимого источника вспомогательных данных. Например, для выделения служебной информации от НКА, синхронизации нескольких НИП, определения координат подвижного НИП, а также для организации режимов относительных (дифференциальных) измерений.
Организация приема прямых и ретранслированных сигналов ГНСС одновременно на несколько разнесенных в пространстве НИП позволяет сократить число НКА, необходимых для определения координат потребителя, например суммарно-дальномерным методом, а также применять дополнительно угломерные методы определения линии положения без использования направленных антенн. При этом каждые два НИП можно рассматривать в качестве одной базы фазового интерферометра, когерентность приемников которого обеспечивается путем обработки прямых сигналов НКА.
Если погрешность взаимной синхронизации навигационных приемников, установленных на разнесенных НИП, недостаточна для обработки фазовых измерений, то целесообразно использование в качестве радионавигационного параметра (РНП) разностей доплеровских частот ретранслированных сигналов одного НКА, принятых разными НИП. В этом случае градиент разностно-доплеровского метода существенно больше, чем его значение при обработке сигналов от разных НКА. Это позволяет применять разности доплеровских частот для совместного определения координат и скорости потребителя. Совместное использование разностно-доплеровского метода и суммарно-дальномерного при приеме сигналов на разнесенные НИП позволяет сократить минимально необходимое число ретранслируемых сигналов НКА до одного, что особенно важно в случае необходимости ретрансляции сигналов только ГНС ГЛОНАСС.
Дополнительную информацию о положении потребителя может дать применение в антенной системе НИП нескольких разнесенных в пространстве антенн, т.е. интерферометра с малой базой из двух или трех антенн. При измерении интерферометром разности фаз любых сигналов, принятых от потребителя, такая антенная система позволяет определять пеленг на объект с пункта расположения одного НИП. Совместная обработка данных пеленгования от нескольких НИП может дать оценку положения источника излучения на плоскости или в пространстве.
В главе проведен сравнительный анализ способов определения координат по прямым и ретранслированным сигналам ГНСС. При анализе и сравнении точностных свойств различных позиционных методов используются понятия и выражения градиентов навигационного параметра (НП). Модуль градиента НП ![]() ав прямоугольной системе координат имеет выражение:
ав прямоугольной системе координат имеет выражение:
 аа а(3)
аа а(3)
Для связи ошибки поверхности (линии) положения ![]() ас погрешностью измерения НП
ас погрешностью измерения НП ![]() аиспользуется формула:
аиспользуется формула:
![]() , аа аа(4)
, аа аа(4)
из которой видно, что в позиционных методах местоопределения необходимо стремиться к увеличению градиента поля НП.
Общими позиционными методами навигационных определений как по сигналам только НКА ГНСС, так и при использовании ретрансляторов этих сигналов являются: псевдодальномерный и разностно-дальномерный методы для координат и соответствующие им псевдодоплеровский и разностно-доплеровский методы для определения составляющих вектора скорости.
Известно, что при одинаковых погрешностях измерения РНП точности оптимальных по методу наименьших квадратов оценок координат псевдодальномерного и разностно-дальномерного методов совпадают. Поскольку градиенты псевдодальномерного и псевдодоплеровского, а также разностно-дальномерного и разностно-доплеровского методов одинаковые, при таких же условиях совпадают и соответствующие оценки составляющих вектора скорости, найденные с помощью псевдодоплеровского и разностно-доплеровского методов.
Таким образом, потенциальная точность по критерию минимальной погрешности определения поверхностей положения для указанных выше методов одинакова, как для измерений РНП непосредственно по сигналам НКА, так и при приеме только ретранслированных сигналов.
Значения градиентов суммарно-дальномерного (суммарно-доплеровского) и угломерного методов для определения координат и скорости потребителя должны определяться с учетом возможного на практике положения потребителя относительного НКА и одного или нескольких НИП.
Достаточно просто оценить значения градиентов суммарно-дальномерного и суммарно-доплеровского методов при использовании одного НИП. В большинстве практических приложений ретрансляторов сигналов НКА выполняются условия ![]() аи
аи ![]() . Например, для внешнетраекторных измерений (ВТИ) можно принять значение
. Например, для внешнетраекторных измерений (ВТИ) можно принять значение ![]() 100 км. Для ГНСС GPS значение
100 км. Для ГНСС GPS значение ![]() 20000Е26000 км. Тогда значение
20000Е26000 км. Тогда значение ![]() 19900Е26100 км.
19900Е26100 км.
Таким образом, выполняются следующие соотношения:
![]() аа(5)
аа(5)
Выразим ![]() ачерез величины
ачерез величины ![]() , используя известное выражение для косинуса угла в треугольнике:
, используя известное выражение для косинуса угла в треугольнике:
![]() . а(6)
. а(6)
Тогда с учетом известного преобразования для косинуса половинного угла можно записать следующее
![]() . а(7)
. а(7)
Обозначим через ![]() . Очевидно, что значение этой разности лежит в пределах
. Очевидно, что значение этой разности лежит в пределах ![]() . С учетом введенной величины
. С учетом введенной величины
 а (8)
а (8)
Пренебрегая двумя последними слагаемыми внутри скобок ввиду их малости, получим:
 а аа(9)
а аа(9)
Отсюда легко получить условия, при которых суммарно-дальномерный метод для потребителя сигналов ГНСС потенциально не уступает по точности определения координат дальномерному, что соответствует следующему соотношению градиентов указанных методов ![]() . Это соотношение всегда выполняется, когда
. Это соотношение всегда выполняется, когда ![]() . При этом условии значение градиента
. При этом условии значение градиента ![]() аи стремится к максимуму (
аи стремится к максимуму (![]() ) при расположении и потребителя, и НКА низко над горизонтом относительно наземного НИП. Наихудшие условия для использования суммарно-дальномерного метода для потребителя сигналов ГНСС получаются при
) при расположении и потребителя, и НКА низко над горизонтом относительно наземного НИП. Наихудшие условия для использования суммарно-дальномерного метода для потребителя сигналов ГНСС получаются при ![]() , т.е. в случае расположения потребителя близко к линии визирования НКА с пункта расположения НИП.
, т.е. в случае расположения потребителя близко к линии визирования НКА с пункта расположения НИП.
В третьейа главе Методологические основы построения локальной системы позиционирования подразделений пожарной охраны МЧС России и особенности их применения рассмотрены особенности построения локальной системы позиционирования на базе ретрансляторов и псевдоспутников. Структура локальных систем позиционирования (ЛСП), использующей ретранслированные сигналы НКА, может рассматриваться как результат замены в эталонной точке псевдоспутника на ретранслятор (Р). Поэтому этот вариант обеспечивает те же преимущества, что и ЛСП с псевдоспутником (рисунок 3).
Возможный вариант реализации расчета дифференциальной коррекции НП в программном обеспечении НАП при приеме сигналов от ретранслятора с известными координатами (т.е. от эталонной точки (ЭТ)) нагляднее может быть представлен для разностно-дальномерного метода (РДМ) в виде выражения:
![]() аа а(10)
аа а(10)
где ![]() ;
; ![]() а - искомая поправка к НП в НАП применительно к РДМ; а
а - искомая поправка к НП в НАП применительно к РДМ; а![]() - измеренные в НАП значения псевдодальностей от НКА и через 1-й ретранслятор;
- измеренные в НАП значения псевдодальностей от НКА и через 1-й ретранслятор; ![]() а - вычисленные в НАП значения истинных дальностей от НКА до 1-го ретранслятора с известными координатами.
а - вычисленные в НАП значения истинных дальностей от НКА до 1-го ретранслятора с известными координатами.
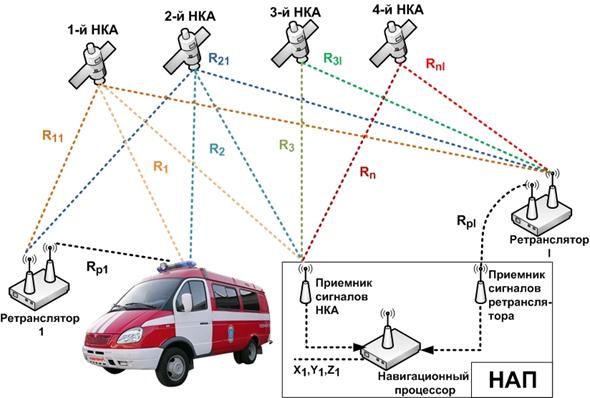
Рисунок 3 - Метод дифференциальной коррекции по сигналам наземного ретранслятора ГНСС
Дополнительные преимущества этого варианта ЛСП заключаются в следующем.
1. Значительно упрощается аппаратура контрольно-корректирующей станции (ККС) при использовании в передатчиках ретрансляторов дециметрового диапазона. При этом доработка бортовой НАП выливается в установку дополнительной антенны и доработкуа программного обеспечения НАП. При организации передачи ретранслированных сигналов на частотных литерах, незанятых сигналами НКА, необходимость в установке дополнительной приемной антенны НАП отпадает.
2. Наличие сильной корреляции погрешностей измерений первичных НП по прямым и ретранслированным сигналам для каждого наблюдаемого НКА позволяет в значительной степени устранять эти погрешности на уровне первичной обработки, т.е. при фильтрации измерений НП в НАП.
3. Простота организации режимов относительных измерений (ОИ) для группы (комплекса) наземных и/или воздушных объектов в местной системе координат, связанной с точкой установки Р. Возможность организации совместных ОИ по сигналам ГНС ГЛОНАСС и GPS, а в будущем и ГНСС Galileo (для НАП следующих поколений, способной работать с сигналами этих ГНСС).
4. Возможность организации локальных рабочих зон с гарантированными уровнями надежности и точности НВО при обеспечении радиовидимости для НАП сигналов хотя бы одного НКА и сети из трех ретрансляторов, как это показано на рисунке 3.
Существует возможность организовать несколько вариантов алгоритмов вторичной обработки РНП, отличающихся разным составом привлекаемых в обработку измерений для псевдодальномерного и разностно-дальномерного методов обработки прямых и ретранслированных сигналов НКА.
Большее количество вариантов РДМ по сравнению с числом вариантов псевдодальномерного метода (ПДМ) связано с отличиями в значениях составляющиха суммарной погрешности измерения РНП при формировании разностных измерений по сигналам от НКА и ретрансляторов.
Для обозначения вариантов псевдодальномерных и разностнодальномерных методов обработки прямых и ретранслированных сигналов НКА используются сокращения, например ПДМ13 или РДМ22. В этих сокращениях цифры показывают количество НКА и ретрансляторов (первая и вторая цифры соответственно), сигналы от которых используются при обработке данным методом.
Основные недостатки локальных систем позиционирования на базе ретрансляции аналогичны недостаткам, свойственным системам с псевдоспутниками. Прежде всего, это ограничение рабочей зоны ретранслятора дальностью прямой видимости, что требует организации относительно густой сети из ретрансляторов для обеспечения непрерывной зоны поддержки. Кроме этого, возникают технические сложности разделения сигналов передаваемых от разных ретрансляторов, а также организация своевременного доведения до потребителей эталонных координат этих ретрансляторов.
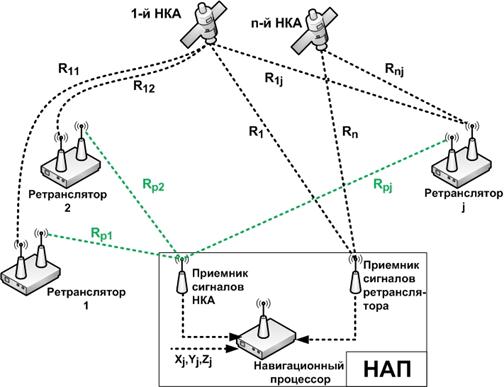
Рисунок 4а - Средство функционального дополнения ГНСС
на основе использования ретрансляторов сигналов
Необходимое количество ретрансляторов для обеспечения гарантированного приема переизлучаемых сигналов НКА может быть найдено в зависимости от высоты антенны передатчика этих сигналов и заданных размеров рабочей зоны ЛСП.
При использовании ЛСП на базе псевдоспутников или ретрансляторов для наземных потребителей необходимо учитывать возможность увеличения погрешностей, обусловленных интерференцией в точке приема прямой волны и волны, переотраженной местными предметами (эффект многолучевого распространения).
Для снижения этого фактора в НАП ГНСС обычно используют специальные типы антенн, которые имеют минимальное усиление диаграммы направленности для углов визирования менее 10 градусов, что позволяет уменьшитьа влияние сигналов НКА, переотраженных местными предметами. Очевидно, что для ретрансляции сигналов НКА в интересах наземных потребителей такая форма диаграммы направленности не подходит, т.к. наиболее вероятным является расположение приемной антенны НАП ниже уровня передающей антенны ретранслятора. В этом случае необходимо, по аналогии с сотовыми системами связи, применять направленные антенны, формирующие максимум диаграммы излучения вдоль поверхности Земли. Очевидно, что при расположении передающей антенны ретранслятора и приемной антенны НАП относительно близко от подстилающей поверхности следует ожидать, что распространение сигнала будет сопровождаться сильными переотражениями от местных предметов, как это и происходит в сотовых системах связи.
Для компенсации переотраженных сигналов в таких условиях необходимо применение специальных алгоритмов сигнальной обработки, теория которых достаточно развита в настоящее время. Однако для стационарных наземных потребителей возможно использование и другого способа компенсации многолучевого распространения ретранслируемых сигналов. Если считать, что интерференционная картина прямых и отраженных сигналов от передатчика ретранслятора для наземного потребителя стационарна, то эффект интерференции проявится в виде дополнительной погрешности в измеряемом времени распространения сигнала на трассе НКА-Р-НАП. Данную случайную погрешность можно представить в виде неизвестной дополнительной задержки сигнала, возникающей на трассе Р-НАП и постоянной на интервале наблюдения для стационарных ретранслятора и объекта. Указанное обстоятельство позволяет исключить данный вид погрешности на этапе вторичной обработки результатов измерений в многоканальной НАП, в частности при использовании разностно-дальномерных методов определения НП по ретранслированным сигналам.а Для практической реализации этого способа необходимо ретранслировать сигналы как минимум двух НКА, что несколько снижает возможности сети ретрансляторов как средства дополнения ограниченной орбитальной группировки ГНСС. С другой стороны, разностный способ обработки измерений НП ретранслированных сигналов позволяет использовать их при ограничении прямой радиовидимости, т.е. в условиях приема только после переотражения местными предметами. Эта возможность расширяет рабочую зону передатчика каждого ретранслятора, особенно в условиях пересеченной местности.
В четвертой главе Разработка локальной системы позиционирования подразделений пожарной охраны МЧС России в закрытых помещениях зданий и сооружений потенциально-опасных объектов промышленности исследованы факторы и закономерности, определяющие облик локальных систем позиционирования подразделений пожарной охраны МЧС России в закрытых помещениях зданий и сооружений. Существует ряд задач, выполнение которых осуществляется в закрытых помещениях, требует навигационной поддержки, но прием сигналов ГНСС в этих условиях проблематичен, а порой и невозможен. Примером может служить навигационное обеспечение на крупных объектах действий пожарных расчетов и антитеррористических подразделений, отслеживание спасателей внутри зданий в чрезвычайных условиях, решения задач транспортной логистики. В данных обстоятельствах для обеспечения навигационной поддержки необходимо наличие мобильных средств, функционально дополняющих ГНСС. Одним из перспективных вариантов подобного дополнения могут служить псевдоспутники, интегрированные в единую систему. С их помощью можно значительно повысить точность навигационного обеспечения потребителей, находящихся в сложной окружающей обстановке. Однако, наряду с этим имеются необходимость решения ряда проблем. Использование ПС при построении систем позиционирования в закрытых помещениях приводит к возникновению нескольких источников ошибок, что вызывает необходимость их устранения. Наиболее значительными источниками ошибок служат многолучевое распространение, эффект близости-дальности, погрешность синхронизации временных шкал псевдоспутников (псевдолитов) и неопределенность расположения псевдолитов. Перечисленные причины ведут ка срыву в помещении отслеживаемых сигналов.
Для борьбы со срывом отслеживаемых сигналов в помещении может быть использован метод, включающий адва подхода к решению этой проблемы: увеличение количества передатчиков, который известена как эффективный путь в случае использования GPS в помещении; увеличение количества приемников.
Как показали результаты экспериментов, увеличение количества приемников является более эффективным, чем увеличение количества передатчиков. Был сделан вывод, что оптимальным вариантом является использование 4-х передатчиков, а количество приемников зависит от условий приема.
Другим методома решения проблемы местоопределения в помещении, являются синхронизированные сети псевдоспутников, передающих сигналы системы GPS. Результаты статических экспериментов показали, что псевдоспутники могут быть успешно синхронизированы и, следовательно, использование предложенной схемы дает возможность реализовать недорогую автономную навигационную систему, обеспечивающую сантиметровую точность местоопределений в помещениях.
Рассмотрены типы навигационных систем на базе псевдоспутников, используемых в помещении. Показано, что в синхронной навигационной системе аппаратура пользователя может вычислять свое собственное местоположение без использования корректирующих данных от контрольной станции.
Исследованы характеристики асинхронных и синхронных навигационный систем с использованием псевдоспутников (рисунок 5).
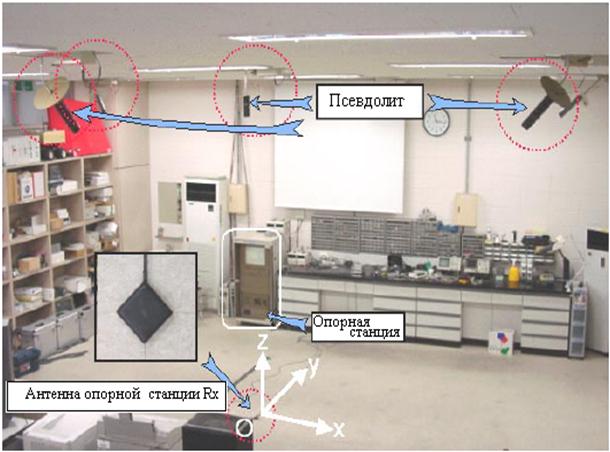
Рисунок 5 - Испытание навигационной системы на базе псевдоспутников
Для решения проблемы ближний/дальний применялась импульсная схема передачи сигнала псевдоспутника. Использовалась навигационная система координат - прямоугольная система координат, в которой исходная точка расположена на антенне приемника контрольной станции GPS.
Антенны GPS-приемника контрольной станции были установлены в первоначальной точке и накопили измерения в 37 откалиброванных точках на потолке, как показано на рисунке 6.
Для уменьшения шумов измерения, были накоплены данные 100-эпох в каждой откалиброванной точке и использованы их среднее значение. Для улучшения точности калибровки местоположения псевдоспутников, калиброванные точки были распределены очень широко, как показано на рисунке 6. Для сравнения характеристик асинхронных и синхронных навигационный систем на базе псевдоспутников, был выполнен анализ ошибок определения местоположения объекта в статике и динамике.
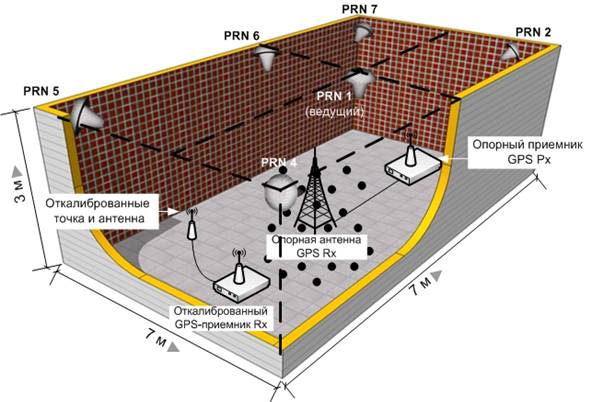
Рисунок 6 - Откалиброванные точки для калибровки местоположения псевдоспутников
Характеристики, полученные в асинхронной навигационной системе псевдоспутников, оказалисьа лучше, чем в синхронной. Это вызвано тем, что существуют ошибки синхронизации часов псевдоспутников (1Ц2 см) в синхронной навигационной системе псевдоспутников.
Однако ошибки часов синхронизации могут быть улучшены, если использоватьа рубидиевые и цезиевые атомные часыа в точныха вторичныха часах. Таким способом можно уменьшить ошибки определения местоположения с использованием навигационной синхронной системы псевдоспутников до уровня аналогичного, получаемого с использованием асинхронной навигационной системы псевдолитов.
Исследованы вопросы теории распространения сигналов в закрытых помещениях, дана предварительная оценка параметров сигнала системы позиционирования, разработаны требования к параметрам сигнала локальных систем позиционирования подразделенийа пожарной охраны МЧСа России в закрытых помещениях зданий и сооружений.
Рассматриваются методы ограничения влияния многолучевого распространения сигналов. Сигналы ГНСС, интенсивно отражаясь от поверхности земли и близко расположенных сооружений, значительно ухудшают условия их приема и отслеживания.
При одновременном приеме сигналов псевдоспутника и сигналов спутников всё пространство в зоне действия псевдоспутника условно может быть разделено на три зоны: ближнюю, промежуточную и дальнюю. В пределах ближней зоны, расположенной непосредственно у псевдоспутника, уровень его сигналов значительно превосходит уровень сигналов спутников.
Это приводит к перекрестным искажениям сигналов, принимаемых от других псевдоспутников или спутников ГНСС. В дальней зоне возникает обратная ситуация: вследствие низкого уровня невозможен прием сигналов псевдоспутника, и только в промежуточной зоне, где мощности сигналов соизмеримы, возможен прием и сопровождение, как сигналов спутников, так и сигнала псевдоспутника.
Для решения проблемы многолучевого распространения в системах позиционирования в закрытых помещенияха зданий и сооружений потенциально-опасных объектов промышленности используется сверхширокополосная (или ultra-wide band (UWB)) технология обработки сигнала. Благодаря большой полосе сверхширокополосные системы (СШП) характеризуются очень маленькой длительностью сигнала, обычно порядка наносекунд. Таким образом, СШП система излучает сверхкороткие импульсы с низкой периодичностью. В качестве СШП импульсов могут использоваться производные гауссовского импульса, импульсы на основе модифицированных полиномов Эрмита, вайвлет-импульсы. Для СШП систем, работающих при жестких ограничениях, важно использовать оптимальные формы импульсов, чтобы в полной мере утилизировать доступные полосу и мощность. В дополнение к СШП системам с низкой периодичностью возможно построение СШП систем с непрерывной передачей.
Для обоих вариантов СШП систем, как с малой периодичностью, так и непрерывным излучением, общее свойство очень большой полосы предоставляет множество преимуществ в таких приложениях как позиционирование, связь и локация.
Основные из них могут быть сформулированы следующим образом: проникновение через препятствия; высокая точность определения дальности, а значит, и позиционирования; высокоскоростная передача данных; низкая стоимость реализации и энергоемкости.
Для проверки возможностей построения системы позиционирования внутри помещений с применением СШП технологии был произведен предварительный расчет энергопотенциала радиоканала и получены оценки точностных характеристик.
Экспериментальные результаты показали, что при прохождении сигнала через одну стену сигнал ослабляется на 10Е15 дБ. То есть в случае присутствия на трассе распространения трех (или четырех) стен и d = 100 м получим ![]() адБ.
адБ.
Для сигналов СШП систем скважность (отношение длительности сигнала к периоду повторения) определяется числом возможных временных кадров, в которых может излучаться импульсы одного передатчика. В зависимости от номера канала это значение варьируется от 2 до 32.
Система позиционирования с СШП сигналом и с характеристиками радиоканала, приведенными выше, обеспечивает навигационную поддержку потребителей, находящихся на удалениях от ПС от 50 до 1000 метров.
Проведено моделирование сигнала ПС с учетом переотражений радиоволн.
В ходе исследования проведено моделирования влияния многолучевости распространения на структуру принимаемого сигнала. Проведено исследование влияния многолучевости распространения радиоволн на точность позиционирования. Рассмотрены четыре варианта распространения сигнала при отражении от различных зданий.
В модели задержка сигнала принимается случайной величиной, распределенной по равномерному закону, а амплитуда сигнала определяется случайной величиной, распределенной по нормальному закону с математическим ожидание равным 0 и среднеквадратичным отклонением - 1.
Для количественной оценки влияния искажений выполнен спектральный анализ для импульсов двух длительностей с различными формами искажений. Из сравнительной оценки следует, что при различных начальных условиях амплитуда основной гармоники может изменяться в пять и более раз. Уменьшение длительности исследуемого импульса приводит к увеличению влияния искажений сигнала на его спектр.
Для оценки влияния искажения сигнала на величину ошибки определения местоположения объекта необходимо знать величину изменения времени фиксации начала импульса в приемнике. Для решения этой задачи смоделирован линейный стационарный фильтр, настроенный на частоту основной гармоники исследуемого сигнала. В данном случае необходимо учитывать, что выходной сигнал на выходе фильтра появляется спустя некоторое время вследствие нулевых начальных условий самого фильтра как динамического звена. Однако этот фактор не мешает определять величину относительного сдвига начала импульса.
При учете отражений от внутренних элементов зданий задержка переотраженных сигналов уменьшится. Это снова вызовет необходимость учета искажения начала импульса.
Таким образом, натурные эксперименты и результаты теоретических исследований показали, что основными техническими проблемами, которые необходимо решать при построении локальной системы позиционирования в закрытых помещениях, являются селекция прямого сигнала ПС на фоне отраженных сигналов и реализация динамического диапазона в системе, обеспечивающего покрытие требуемой зоны обслуживания.
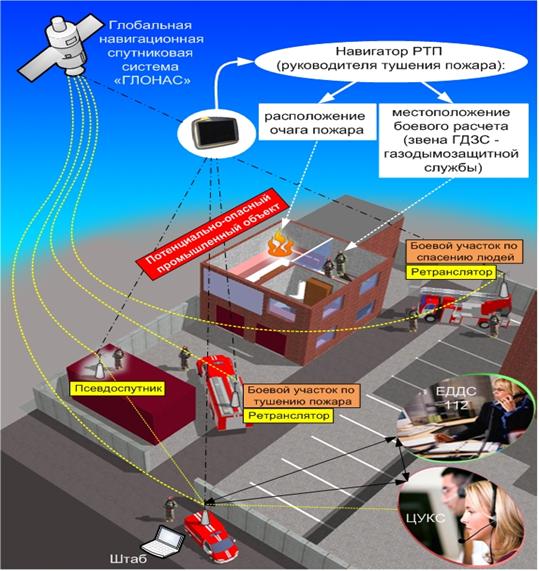
Рисунок 7 - Локальная система позиционирования подразделений пожарной охраны МЧС России
| Страницы: | 1 | 2 | 3 | |
Авторефераты по всем темам >>
Авторефераты по техническим наукам