
Котельников Ю. П
| Вид материала | Документы |
СодержаниеИсходные данные График моделирования |
- Ф. Попов, И. С. Гро-мека, П. С. Порецкий, П. С. Назимов, Ф. М. Су-воров, Д. М. Синцов,, 50.97kb.
- В. С. Котельников, Н. П. Алёшин, Э. А. Гладков, А. А. Шельпяков, В. Ф. Лукьянов,, 1128.77kb.
- В. С. Котельников, Н. П. Алёшин, Г. Г. Чернышов, А. А. Шельпяков, В. Ф. Лукьянов,, 1262.71kb.
- Г. П. Щедровицкий, С. И. Котельников, 511.11kb.
- Хххvii самарская областная студенческая научная конференция 12 22 апреля 2011 года, 1774.74kb.
- П. П. Котельников Не судимы, но осуждены книга, 2891.33kb.
- Технологический регламент, 1659.01kb.
- Пригласительный билет и программа часть 2 Гуманитарные дисциплины самара 2011 сопредседатели, 1127.78kb.
- С. И. Котельников Организационно-деятельностная игра как новая форма организации, 473.36kb.
- А. А. Котельников Проблемы российско-монгольского сотрудничества, 167.62kb.
Санкт-Петербургский Государственный Университет Информационных Технологий, Механики и Оптики
Кафедра Систем Управления и Информатики
Расчетная работа №1 (этап 2)
"Инженерные методы оптимизированной динамической настройки регуляторов"
по курсу "Основы системной автоматизации"
Вариант №27
| Выполнил: | Студент гр. 5147 Митриченко К.Е. |
| Проверил: | Котельников Ю.П. |
Санкт-Петербург
2008 г.
Исходные данные:
Настройка на симметричный оптимум подразумевает «пригонку» модуля частотной передаточной функции к 1, так же как и для модульного оптимума, только с разницей в виде передаточной функции замкнутой системы:
Дана статическая система:
 .
.Можно попробовать использовать регулятор с астатизмом первого порядка, например ПИ-регулятор:
Упрощенный ОУ:

ПФ разомкнутого контура:

ПФ замкнутой системы:

Вид ПФ замкнутой системы удовлетворяет виду замкнутой системы для которых применима настройка на СО:
Применим условие настройки на симметричной оптимум:
 ,
,Условие настройки симметричного оптимума для данной системы:
 ;
;Отсюда получаем постоянную времени Пи-регулятора и пропорциональный коэффициент:
Для проверки правильности расчетов введем нормирующую постоянную времени и параметр r:
Подставляя постоянную времени ПИ-регулятора, пропорциональный коэффициент, нормирующую постоянную времени и параметр r в передаточную функцию замкнутой системы, получим ПФ замкнутой системы, настроенную на симметричный оптимум:
Качественные показатели системы имеют значения при r=0.7
Схема моделирования:

График:
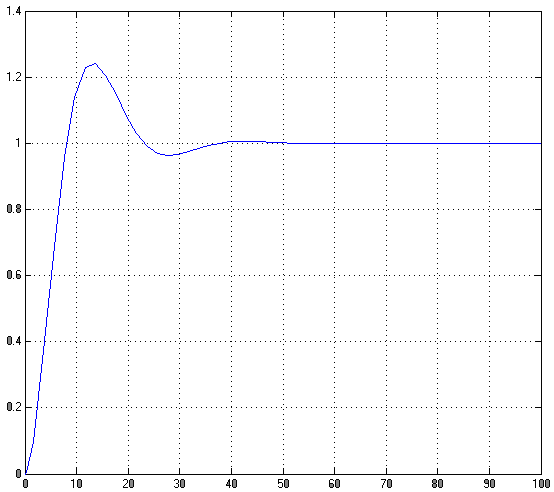
Полученные параметры:

Теоретические значения и значения полученные из графика совпадают с допустимой погрешностью.
Исследуем влияние изменения параметров настройки в широких пределах.
 | 0.1 | 1 | 5.44 | 10 | 50 |
 | 2,12 | 2,12 | 2,12 | 2,12 | 2,12 |
 | неуст | неуст | 34 | 21 | 185 |
 | 24,26 | 5 | 0 |
| | 5.44 | 5.44 | 5.44 | 5.44 | 5.44 |
| | 0.1 | 1 | 2,12 | 10 | 30 |
| | 188 | 38 | 34 | 28 | 25 |
| | 0 | 14,4 | 24,26 | 47 | 60 |
Использование фильтров
Для переходных характеристик систем, настроенных на ОСО характерно значительное перерегулирование, что в ряде случаев может быть недопустимо
Значительное перерегулирование связано с наличием
 в числителе передаточной функции замкнутой системы. Для того, чтобы компенсировать влияние этого значения в числителе необходимо использовать фильтр и, поскольку, фильтр будет располагаться на входе системы по задающему воздействию, то будем говорить о сглаживании задающего сигнала.
в числителе передаточной функции замкнутой системы. Для того, чтобы компенсировать влияние этого значения в числителе необходимо использовать фильтр и, поскольку, фильтр будет располагаться на входе системы по задающему воздействию, то будем говорить о сглаживании задающего сигнала.Выбирая фильтр с передаточной функцией:
можно добиться следующих качественных показателей:
Схема моделирования:

График:
Полученные параметры:
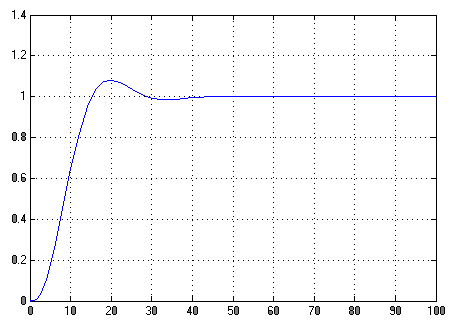
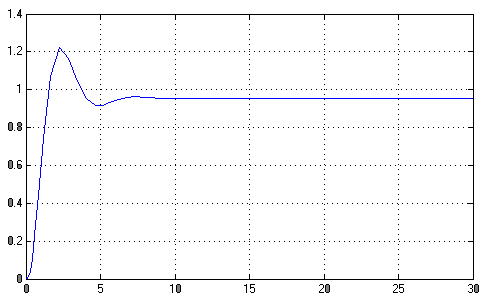
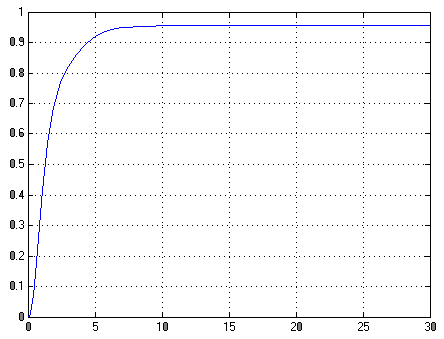
Как видно из графика качественные показатели соответствуют теоретическим, поэтому если требуется уменьшить перерегулирование до 0, необходимо применить фильтр сглаживания-дифференцирования:


Параметры фильтра:

Тогда передаточная функция системы примет вид:
 , a фильтр примет вид:
, a фильтр примет вид: 
Соответствующие качественные показатели системы:
Схема моделирования:

График моделирования:
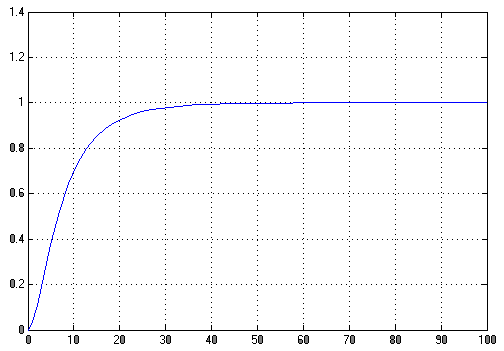
Полученные параметры:
Из графика видно, что перерегулирование уменьшилось до нуля, хотя время регулирования немного возросло.
Полученное время переходного процесса не укладывается в допустимые пределы (30с>18,4), попробуем использовать ПД-регулятор.
ПД-регулятор имеет вид:

Упрощенный ОУ:

ПФ разомкнутого контура:

ПФ замкнутой системы:

Применим условие настройки на симметричной оптимум:
,Условие настройки симметричного оптимума для данной системы:
 ;
;Вводя нормирующую постоянную времени
получаем соотношения для выбора параметров регулятора:
Получаем ПФ замкнутой системы, настроенную на симметричный оптимум:
График моделирования:
Полученные параметры:
Перрегулирование нас не устраивает, значит применим фильтр сглаживания-дифференцирования:
Параметры фильтра:
Тогда передаточная функция системы примет вид:
, a фильтр примет вид: 
Схема:

График:
Вывод: Настройка на симметричный оптимум в сочетании со сглаживанием-дифференцированием по достигаемым качественным показателям практически не уступает настройке на модульный оптимум.