
Автоматическое управление зенитным углом искривления ствола скважины
| Вид материала | Автореферат |
- «гди-эффект» для массовой обработки данных гдис, 435.34kb.
- Вопросы для контрольных работ и экзамена по предмету, 30.02kb.
- «Гидродинамический расчет совместной работы пласта и скважины», 22.19kb.
- 7 тема: «Материалы и Реагенты для регулирования свойств буровых растворов», 792.13kb.
- Методика определения параметров продуктивного пласта и нефтяной скважины Обработка, 100.48kb.
- Инструкция по безопасности производства работ при восстановлении бездействующих нефтегазовых, 2818.35kb.
- Инструкция содержит организационные, технические и технологические требования, выполнение, 2764.24kb.
- «Гидродинамический расчет совместной работы пласта и скважины», 22.46kb.
- Программа-минимум по специальности 05. 13. 06 «Автоматизация и управление технологическими, 83.57kb.
- Преподаваемые дисциплины, 188.88kb.
На правах рукописи
Никульшин Иван Викторович
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ЗЕНИТНЫМ УГЛОМ ИСКРИВЛЕНИЯ СТВОЛА СКВАЖИНЫ
Специальность 05.13.06 –Автоматизация и управление технологическими процессами и производствами (по отраслям)
Автореферат
диссертации на соискание ученой степени
кандидата технических наук
Астрахань – 2010
Работа выполнена на кафедре Автоматизации технологических процессов и производств Астраханского Государственного Технического Университета.
| Научный руководитель: | доктор технических наук, профессор, Есауленко Владимир Николаевич |
| Официальные оппоненты: | доктор технических наук, профессор, Шевчук Валерий Петрович |
| кандидат технических наук, Филоненко Александр Васильевич | |
| Ведущее предприятие: | Российский Государственный Геолого-Разведочный Университет |
Защита состоится “20” декабря в 15_00 часов в аудитории 305, главного учебного корпуса на заседании диссертационного совета Д307.001.01 в Астраханском Государственном Техническом Университете по адресу: 414025, г. Астрахань, ул. Татищева 16.
С диссертацией можно ознакомиться в библиотеке Астраханского Государственного Технического Университета.
А
 втореферат разослан “19” ноября 2010 г.
втореферат разослан “19” ноября 2010 г.Ученый секретарь диссертационного совета
доктор технических наук, профессор Попов Г.А.
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность работы. С начала 80-х годов XX века в нашей стране внедряются новые технологии глубокого бурения скважин на нефть и газ с глубиной забоя от 5000 до 7000м. В ближайшие годы глубина скважин возрастет до 9000м. При этом условия строительства скважин значительно усложняются, в связи с этим совершенствуется технологии проводки скважин, обеспечивающие существенные изменения ряда показателей процесса бурения.
Особое значение приобретает бурение наклонно направленных и горизонтальных скважин. Важнейшей задачей при строительстве скважин является автоматизация всех технологических процессов бурения, так как отклонение текущих значений технологических параметров от проектных создает ряд осложнений и серьезных аварий, преодоление которых требует значительных затрат времени и материальных средств на всех этапах строительства скважин. Эти обстоятельства выдвигают на первый план необходимость получения достоверной информации о протекании чрезвычайно сложного технологического процесса бурения скважин и оперативное управление этим процессом.
Практика бурения в различных регионах страны показывает, что повышение технико-экономических показателей строительства скважин неразрывно связано с проблемой оптимального управления бурением.
Повышение скоростей бурения и увеличение глубин, бурение наклонно направленных скважин еще более усложняет процесс управления, при этом управление процессом бурения по наземным параметрам существенно усложняется. В связи с этим становится практически невозможным поддержание оптимального режима бурения и предупреждения различных аварий и осложнений.
Определенные успехи достигнуты в области разработки приборов и средств контроля наземных параметров процесса бурения нефтяных и газовых скважин. В области же создания промышленных средств контроля и регулирования забойных параметров до настоящего времени наблюдается значительное отставание от требований современной технологии проводки скважин. Еще многие вопросы этого направления нуждаются в разработке и изучении. Решение этих проблем может быть ускорено с применением надежных и точных средств контроля забойных параметров и автоматизации процесса бурения на этой основе путем создания автоматизированных систем управления процессом бурения скважин. До настоящего времени в практике бурения используется информация о косвенном измерении забойных параметров. Очевидно, эффективно управлять процессом бурения на такой основе нельзя.
Все сказанное выше показывает, насколько актуальна проблема создания технических средств и методов контроля и автоматического управления процессом бурения скважин на основе информации, полученной на забое. Также необходимо обеспечить оперативную передачу забойной информации на поверхность для своевременного оказания управляющего воздействия на процесс и реализовать алгоритмы для вычисления управляющего воздействия.
Особое значение здесь приобретает контроль и регулирование пространственного положения ствола бурящейся скважины, так как он обеспечивает повышение технико-экономических показателей бурения на 20-30%.
Таким образом, создание системы автоматического регулирования пространственным положением ствола скважины, позволяющей повысить точность проходки и минимизировать возможность возникновения аварийных ситуаций и осложнений, является актуальной проблемой.
Основание для выполнения работы. Работа выполнена по планам НИР Астраханского государственного технического университета (номера государственной регистрации 01.20.0005849, 06.22.06ХТ, 01.49.07).
Цели и задачи диссертации. Целью диссертации является, разработка и исследование адаптивной системы автоматического регулирования зенитного угла искривления ствола скважины, обеспечивающей бурение по заданной траектории под влиянием различных возмущений.
В соответствии с поставленной целью в работе ставятся и решаются следующие задачи:
- Патентный анализ систем автоматического регулирования зенитного угла искривления ствола скважины.
- Выбор забойного датчика зенитного угла искривления ствола скважины и канала связи, построение математической модели датчика.
- Построение математической модели процесса искривления.
- Синтез структуры системы автоматического регулирования зенитного угла искривления ствола скважины
- Разработка алгоритма адаптации параметров регулятора с использованием выбранных критериев оптимальности проводки ствола скважины.
- Имитационное моделирование адаптивной системы автоматического регулирования зенитного угла искривления ствола скважины
Методы исследований. Научные положения, представленные в диссертационной работе, обоснованы теоретическими и экспериментальными исследованиями с применением методов теории автоматического управления, физики, технологии бурения, математического анализа, моделирования систем, цифрового моделирования на ЭВМ с использованием пакета Matlab 7 и других.
Основные теоретические положения и выводы подтверждены результатами экспериментальных исследований в лабораторных условиях на этапах разработки. Исследования проводились на кафедре «Автоматизация технологических процессов» Астраханского государственного технического университета.
На защиту выносятся:
- Математическая модель процесса искривления ствола скважины.
- Критерий оптимальности, позволяющий осуществлять выбор оптимальных режимов бурения.
- Структура системы автоматического регулирования зенитного угла искривления ствола скважины
- Адаптивная система автоматического регулирования зенитного угла искривления скважины.
Научная новизна работы:
- Построена математическая модель изменения зенитного угла искривления ствола скважины в процессе бурения под воздействием осевой нагрузки на долото.
- На основе предложенных критерия оптимальности и алгоритма адаптации, синтезирована адаптивная система автоматического регулирования зенитного угла искривления стволов бурящихся скважин.
Личный вклад:
- Разработка математической модели процесса искривления ствола бурящейся скважины
- Предложены критерии оптимальности, учитывающие точность проводки ствола скважины.
- Синтезирована адаптивная система автоматического регулирования зенитного угла искривления скважин.
- Участие в разработке конструкции датчика зенитного угла искривления скважин.
- Разработка макета датчика зенитного угла искривления скважин, проведение экспериментальных исследований.
Практической ценностью обладают:
- Система автоматического регулирования зенитного угла искривления ствола скважины,
- Математическая модель процесса искривления
- Алгоритм адаптации параметров регулятора САР зенитного угла искривления ствола скважины
- Система автоматического регулирования зенитного угла искривления скважины.
- Результаты экспериментального исследования датчика, позволяющие разработать рекомендации по выбору геометрических параметров и режима работы аэродинамического генератора в составе забойного датчика.
Материалы диссертационной работы используются в учебном процессе: при чтении лекций по курсам «Технические средства автоматизации» и «Моделирование систем». На основе полученной модели разработаны и внедрены в учебный процесс методические указания по курсу «Моделирование систем»
Апробация работы. Основные вопросы, составляющие содержание диссертации, докладывались и обсуждались на научно-практических конференциях профессорско-преподавательского состава Астраханского государственного технического университета (2007, 2008, 2009, 2010 г.г.), I открытой научно-практической конференции молодых работников ООО «Газпром Добыча Астрахань» «Наука и молодежь в развитии газовой промышленности - 2009», межрегиональной научно-практической конференции «Моделирование и создание объектов энергосберегающих технологий»(г. Волжский, 2009), всероссийской научно-практической конференции «Ресурсо-энергосбережение и эколого-энергетическая безопасность промышленных городов» (г. Волжский, 2010).
Публикации. Основные положения диссертации опубликованы в 7 печатных работах, в том числе в двух патентах, 5 статьях в центральных специализированных журналах «Строительство нефтяных и газовых скважин на суше и на море», «Автоматизация, телемеханизация и связь в нефтяной и газовой промышленности», «Известия ВУЗов». Кроме того, автором разработаны методические указания по курсу «Моделирование систем», которые используются в учебном процессе студентами специальности «Автоматизация технологических процессов» Астраханского государственного технического университета.
Структура и объем работы. Диссертационная работа состоит из введения, пяти глав, заключения, списка использованной литературы, изложенных на 121 странице машинописного текста и приложений, содержит 12 рисунка и 2 таблицы. Список использованной литературы содержит 82 наименования.
СОДЕРЖАНИЕ РАБОТЫ
Во введении приводится обоснование актуальности проблемы создания системы автоматического регулирования процесса искривления ствола бурящейся скважины, сформулирована цель, определена научная новизна и практическая ценность результатов данной работы.
В первой главе выполнен сравнительный анализ систем автоматического контроля за наклонно-направленным бурением, а также рассмотрены средства и системы автоматического регулирования пространственного положения. Показано, что важной задачей является автоматическое управление непосредственно во время бурения с использованием забойных параметров.
Рассмотрены известные системы, произведен выбор элементов для разработки систем автоматического регулирования зенитного угла искривления скважины в процессе бурения.
Анализ имеющихся систем наклонно-направленного бурения выявил, что все они обладают существенными недостатками, не позволяющими эффективно решать задачу точной проводки ствола скважины непосредственно во время бурения.
Наиболее эффективным является использование системы автоматического регулирования процесса искривления, позволяющей учитывать сложные забойные условия, при наличии неизвестных параметров процесса и резко меняющихся возмущающих воздействий.
Имеющиеся отечественные и зарубежные разработки охватывают весь комплекс средств, необходимых для построения качественной системы автоматического регулирования процесса искривления ствола скважины. Присутствуют забойные измерительные системы, оперативно получающие сигнал об искривлении ствола. Проработаны способы передачи измерительной информации с забоя скважины на поверхность. Также проработаны электронные средства регулирования, которые размещаются на поверхности скважины и обеспечивают реализацию сложных законов регулирования.
Существуют системы автоматического управления отдельными параметрами процесса бурения (осевая нагрузка, частота оборотов, давление и плотность бурового раствора).
Однако, ни одна из рассмотренных систем, не обеспечивает оперативного непрерывного регулирования зенитного угла искривления ствола скважины. Необходимо создать АСР зенитного угла искривления ствола скважины, использующую забойную информацию о состоянии технологического процесса.
Во второй главе определяются принципы проектирования систем управления пространственным положением стволов скважин в процессе бурения.
Одной из основных технологических операций, осуществляемых в процессе бурения скважины, является контроль за отклонением оси ее ствола от проектного пространственного положения с целью обеспечения оптимальных режимов бурения, устранения возможности возникновения осложнений и аварий, пересечения продуктивного пласта в проектной точке, изучения геолого-технических закономерностей самопроизвольного искривления в конкретных геологических условиях, построения структурных карт, осуществления интерпретации скважинных геофизических данных и решения многих других задач. Не менее важной при бурении скважины является операция ориентирования породоразрушающего инструмента бурильной колонны при искусственном искривлении с целью изменения интенсивности самопроизвольного искривления до регламентируемых значений, проводки ствола скважины в заданном направлении либо удержания направления в конусе допустимых угловых отклонений.
Искривление скважин является сложным процессом и обуславливается совокупностью факторов влияющих на процесс бурения - геологических, технологических и технических:
- к геологическим факторам искривления относятся слоистость, сланцеватость, перемежаемость пород, их анизотропность, наличие пустот, более твердых включений, угол наклона пород к горизонту, пористость и т.д. При бурении по заданной траектории отсутствует возможность изменить геологические условия без отклонения траектории от проектной, следовательно, применительно к управлению процессом искривления, эти факторы можно считать константами или же (если неизвестны их числовые значения) – возмущениями. Именно геологические условия являются основной причиной искривления вертикальных скважин.
- технологические факторы определяются числом оборотов породоразрушающего инструмента и его типом, осевой нагрузкой на долото, параметрами бурового раствора. Технологические факторы можно варьировать в значительных пределах, однако следует отметить, что большинство из них являются взаимосвязанными.
- к техническим факторам принято относить ошибки, связанные с конструктивными особенностями КНБК: эксцентриситет при размещении переводников и долот, несоответствие диаметров БТ и породоразрушающего инструмента, изначальное отклонение бурильной колонны от вертикали.
В третьей главе происходит выбор компонентов системы автоматического регулирования зенитного угла искривления ствола скважины.
Для создания системы автоматического регулирования зенитного угла искривления скважины необходимо решить ряд задач:
- Измерение зенитного угла искривления ствола скважины непосредственно во время бурения
- Передача оперативной информации от датчика к вычислительному устройству
- Вычисление значения управляющего воздействия.
- Оказание управляющего воздействия на процесс бурения.
- Обеспечение отказоустойчивости и ремонтопригодности как системы в целом, так и отдельных ее узлов.
Традиционно, систему автоматического управления принято разбивать на три взаимосвязанные подсистемы – датчик, канал передачи данных и регулирующее устройство.
В работах отечественных авторов был проведен анализ существующих забойных инклинометров и показано, что наиболее перспективным является применение струйных аэродинамических датчиков пространственного положения.
В частности, устройство для измерения зенитного угла искривления ствола скважины является виброустойчивым, термобаростойким устройством для контроля непосредственно в процессе бурения скважины зенитного угла искривления ствола. Это позволит оперативно управлять проводкой скважин по оптимальным траекториям.
На рис.1 показано устройство для измерения зенитного угла искривления ствола скважины.
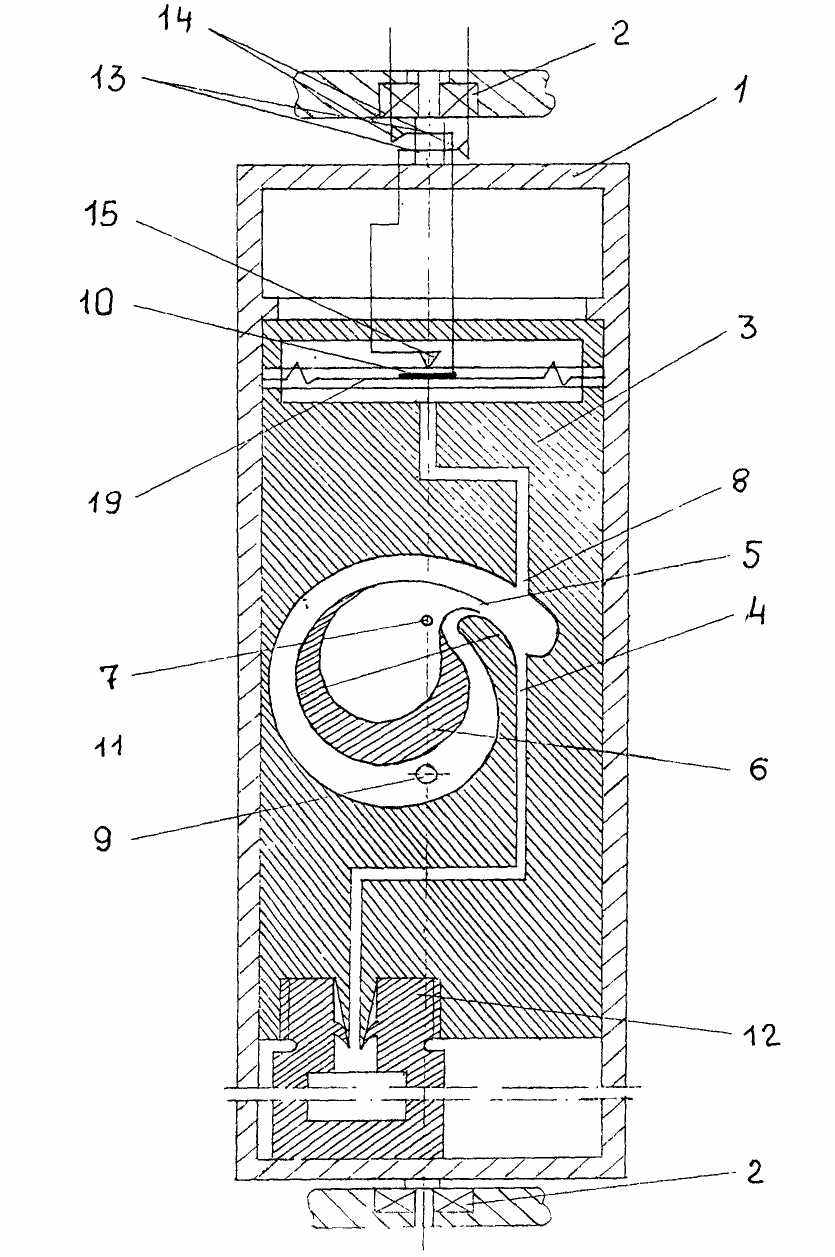
Рис. 1
Устройство для измерения зенитного угла искривления ствола скважины
Устройство, которое размещают над долотом в контейнере, содержит рамку 1, выполненную в виде герметичной камеры, свободно вращающуюся на опорах 2, струйный генератор 3, имеющий в своем составе сопло питания 4, приемное сопло 5, выполненное отвесе 6, дополнительное сопло 7, выполненное в полом отвесе, сообщающееся с отверстием 8, выполненном в профиле с обтекаемой поверхностью, размещенное в зоне пониженного давления у сопла питания, закрепленном на оси 9, выходное сопло 10, сообщающееся с полостью мембраны 11 с закрепленным на ней контактом 12, поверхность специального профиля 13, источник питания, выполненный в виде баллона со сжатым газом 14, закрепленный эксцентрично в рамке, сообщающийся с соплом питания, контактные кольца 15, контакты 16 съема информации, переключающий контакт 17.
Работа устройства основана на эффекте Коанда – свойстве струи изменять направление при наличии поверхности специального профиля путем прилипания струи жидкости или газа к расположенной вблизи твердой стенки.
Устройство работает следующим образом.
Поток газа из сопла питания 4 обтекает рабочую поверхность специального профиля 13 и заполняет полость отвеса 6 через отверстие приемного сопла 5. У обтекаемой поверхности в зоне пониженного давления создается противодавление, которое через дополнительное сопло 7 через сообщающееся с ним отверстие 8 отклоняет поток газа прилипшего к поверхности специального профиля. Это вызывает отрыв потока газа от нее и переход этого потока в выходное сопло 10 и далее в полость мембраны 11.
При этом давление в выходном сопле 8 возрастает скачкообразно и удерживается на максимальном уровне до тех пор, пока противодавление в приемном сопле 5 не снизится до величины, при которой поток вновь начнет обтекать поверхность специального профиля и, следовательно, заполнять полость отвеса 6.
Частота колебаний определяется по формуле:
 , где f – частота колебаний, Гц, С – постоянный коэффициент, зависящий от конструктивных особенностей генератора, V – свободный объем полости отвеса 6, см3.
, где f – частота колебаний, Гц, С – постоянный коэффициент, зависящий от конструктивных особенностей генератора, V – свободный объем полости отвеса 6, см3.С изменением угла искривления рамка 1 с эксцентрично закрепленным в ней баллоном 14 поворачивается под действием силы тяжести и полый отвес 6 располагается в плоскости искривления скважины. При этом приемное сопло 5 струйного генератора 3 перемещается относительно прилипшей к поверхности специального профиля струи, вытекающей из сопла питания 4 от оси струи к ее периферии, что приводит к уменьшению времени заполнения полости отвеса 6 (т.к. расход струи газа питания на периферии меньше, чем на ее оси) и в связи с этим уменьшению частоты колебаний струйного генератора. Таким образом, частота колебаний струйного генератора оказывается пропорциональной изменению зенитного угла искривления скважины. Далее серия пневматических импульсов, полученных на выходном сопле 6 струйного генератора 3 поступает в мембранную полость мембраны 11, мембрана прогибается и замыкает (размыкает) контакты 12, 17. Контакты 16 постоянно замкнутые с контактными кольцами 15 обеспечивают передачу, полученных в результате замыкания и размыкания контактов 12, 17 сигналов в проводную линию связи забоя с устьем скважины.
Предлагаемое устройство обеспечивает контроль зенитного угла искривления скважины непосредственно в процессе бурения, обладает высокой стабильностью переключения и за счет этого повышенной точностью измерения.
В связи с тем, что электронные вычислительные устройства не способны работать в условиях забоя, управляющий блок необходимо разместить на поверхности. Данное обстоятельство приводит к необходимости обеспечить канал связи между забоем и устьем скважины, для непрерывной передачи информации от измерительных устройств к вычислительным блокам.
Сформулируем требования к каналу связи применительно к нашим задачам: глубина исследования скважин (дальность передачи) – более 5000м; канал связи обеспечивает передачу информации непрерывно в процессе бурения; высокая надежность каналообразующей аппаратуры и линии связи; простота организации канала; пропускная способность канала связи должна обеспечивать циркулярную передачу как минимум трех параметров; высокая помехоустойчивость передачи.
Анализируя результаты исследования каналов связи забоя с устьем скважины, полученные рядом авторов и используя опыт построения каналов можно сделать вывод о том, что создать канал, удовлетворяющий сформулированным требованиям можно.
Это должен быть гибридный (комбинированный) канал, составленный из проводной и гидравлической частей. Проводная часть представляет собой канал по типу ЗИЛС-1, а гидравлическая связь - использованный в гидротурботахометре ГТН-3 . При этом проводная часть обеспечит передачу информации с глубины 3000м, а гидравлическая его часть с 6000-7000 до 3000м.
Четвертая глава посвящена построению моделированию процесса искривления ствола скважины.
Процесс бурения, как и любой другой производственный процесс является управляемым, причем число управляющих параметров зависит от ряда факторов: вида применяемой технология бурения, выбора режима и способа бурения, совершенство используемых технических средств.
Входными параметрами процесса бурения являются:
- Осевая нагрузка P, передаваемая на породоразрушающий инструмент
- Частота вращения породоразрушающего инструмента n или средняя окружная скорость вращения буровой коронки ω.
- Объемный расход промывочного агента V, подаваемого в скважину
- Качественные характеристики промывочного агента: плотность ρ, вязкость µ, состав C.
- Длительность работы t породоразрушающего инструмента на забое
- Степень износа породоразушающего инструмента η
- Постоянные величины, не зависящие от режима бурения – тип породоразрушающего инструмента, материал долота и бурильных труб, глубина скважины a1, a2, a3
- Возмущающие параметры f – физико-механические свойства пород (контактная прочность, абразивность, хрупкостные и плотностные параметры)
- Прочие возмущения.
К выходным параметрам, зависящим от входных воздействий, относятся –
- Скорость бурения v.
- Зенитный угол α, азимутальный угол искривления β и глубина l, характеризующие положение ствола в пространстве в каждый момент времени.
- Величина проходки L в данном рейсе.
- Показатель скорости износа инструмента da, показывающий интенсивность падения механической скорости проходки при бурении обычным (не самозатачивающимся) инструментом
- Интенсивность линейного износа db самозатачивающихся коронок.
- Степень износа γ породоразрушающего инструмента
На основании проведенного анализа построена математическая модель процесса искривления ствола скважины в апсидальной плоскости.
Предлагаемую модель можно представить в виде последовательного соединения трех звеньев, выход каждого из которых является входным сигналом для следующего.

Рис. 2. Ячеистая модель процесса искривления
На рис. 2 изображена ячеистая модель процесса искривления, на которой блок 1 представляет собой электродвигатель системы привода лебедки. Входным сигналом служит управляющее напряжение на обмотке статора, выходным – число оборотов ротора. Блок 2 - тормоз лебедки. Входным сигналом служит число оборотов на валу электродвигателя, выходным – осевая нагрузка, передаваемая на забой. Блок 3 - колонна бурильных труб с породоразрушающим инструментом. Входным сигналом служит осевая нагрузка на забой, выходным – зенитный угол искривления ствола скважины. W1, W2, W3 – передаточные функции соответствующих блоков.
 Получим математическое описание каждого из звеньев.
Получим математическое описание каждого из звеньев. 1. Дифференциальное уравнение, описывающее работу асинхронного электродвигателя выглядит следующим образом:
 ,
, где
 ,
,  ,
, 
где
 - диаметр ротора двигателя;
- диаметр ротора двигателя;  ,
,  ,
,  - коэффициенты, определяемые конструкцией электродвигателя,
- коэффициенты, определяемые конструкцией электродвигателя,  - индуктивность обмотки,
- индуктивность обмотки,  - ток якоря,
- ток якоря,  -напряжение внешней обмотки,
-напряжение внешней обмотки,  -число оборотов холостого хода,
-число оборотов холостого хода,  - номинальное число оборотов,
- номинальное число оборотов,  -сопротивление ротора.
-сопротивление ротора. 2. Зависимость осевой нагрузки, передаваемой на забой от числа оборотов привода была представлена уравнением:
 , или, в виде передаточной функции -
, или, в виде передаточной функции -  .
. 3. Для вывода математической модели процесса искривления рассмотрим дифференциальное уравнение процесса искривления, составленное на основе анализа физических процессов, происходящих при бурении (Рис. 3).
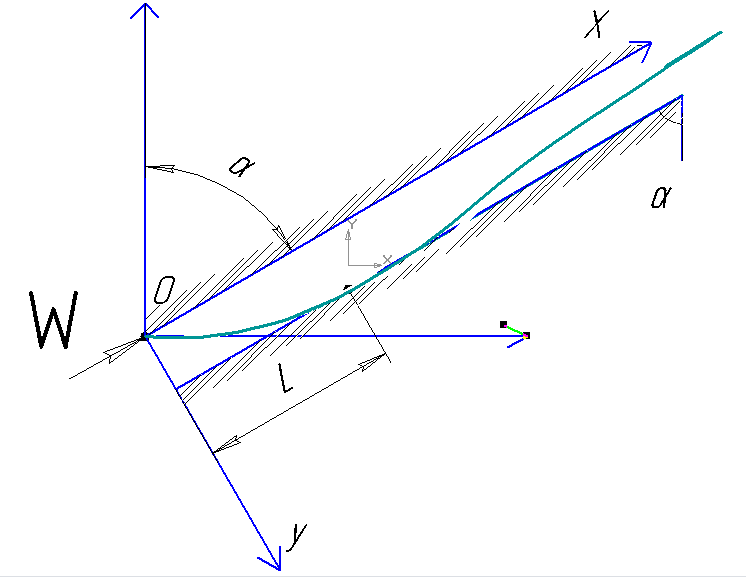
Рис. 3. Расчетная схема процесса искривления
Основное дифференциальное уравнение задачи –
 , где
, гдеW – осевая нагрузка на долото, А – точка касания УБТ со стеной скважины, О – долото, L – расстояние от долота до точки касания УБТ со стенкой скважины, α - угол наклона скважины, EJ – жесткость при изгибе УБТ, p – вес единицы длины УБТ в буровом растворе.
Примем следующие обозначения:
 - удельный вес УБТ,
- удельный вес УБТ,  - удельная осевая нагрузка на долото,
- удельная осевая нагрузка на долото,  - радиальный зазор между УБТ и стенками скважины,
- радиальный зазор между УБТ и стенками скважины,  - удельная длина УБТ,
- удельная длина УБТ,  - наружный диаметр УБТ,
- наружный диаметр УБТ,  - диаметр скважины.
- диаметр скважины.С учетом выбранных начальных условий, решение дифференциального уравнения выглядит следующим образом:
Для удобства дальнейших преобразований заменим арктангенс первыми двумя членами разложения степенного ряда.
Рассмотрим движение объекта управления около номинального режима (
 ).
).  , W(t) и r(t) - малые отклонения от номинальных значений.
, W(t) и r(t) - малые отклонения от номинальных значений.Раскроем скобки и приведем подобные. Пpенебpегая членами уравнения, содержащими малые величины выше первого порядка, получим:
Перейдем к безразмерной форме
Введем обозначения:
 - относительное изменение зенитного угла искривления скважины,
- относительное изменение зенитного угла искривления скважины,  - относительное изменение радиального зазора скважины,
- относительное изменение радиального зазора скважины,  - относительное изменение осевой нагрузки на долото.
- относительное изменение осевой нагрузки на долото. Окончательно уравнение объекта принимает следующий вид:
 ,
,Передаточная функция по каналу управления
Пятая глава посвящена разработке адаптивной системы автоматического регулирования зенитного угла искривления ствола скважины.
В начале главы приводится математическая модель аэродинамического датчика зенитного угла, позволяющая установить однозначную зависимость между показаниями забойного датчика и величиной зенитного угла искривления ствола скважины.
 где V – объем приемной камеры, м3; μ – коэффициент истечения (0,8 – 0,4); тm – показатель политропы; К – показатель адиабаты (для двухатомных газов и воздуха K=1,4); ε0 – относительное давление газа в приемной камере (ε0=Рi/Рi0, здесь Рi давление газа в приемной камере, Рi0 – начальное давление); F – площадь сечения приемного сопла, м2; ε0нач – относительное давление газа в приемной камере, при котором происходит отрыв струи газа от профильной стенки и переключение ее в выходное сопло генератора;
где V – объем приемной камеры, м3; μ – коэффициент истечения (0,8 – 0,4); тm – показатель политропы; К – показатель адиабаты (для двухатомных газов и воздуха K=1,4); ε0 – относительное давление газа в приемной камере (ε0=Рi/Рi0, здесь Рi давление газа в приемной камере, Рi0 – начальное давление); F – площадь сечения приемного сопла, м2; ε0нач – относительное давление газа в приемной камере, при котором происходит отрыв струи газа от профильной стенки и переключение ее в выходное сопло генератора; ε0кон – относительное давление газа в приемной камере, при достижении которого процесс опорожнения приемной камеры заканчивается и струя газа вновь обтекает профилированную стенку, в результате чего начинается процесс заполнения приемной камеры; ε0.а – относительное давление газа в приемной камере к атмосферному.
Р
ис. 4. Схема системы автоматического регулирования зенитного угла
Далее описывается структурная схема и принцип действия САР зенитного угла искривления ствола скважины .
Выходной сигнал с датчика 1 зенитного угла искривления скважины подается на вход гидравлического канала связи 2 забоя с устьем скважины. На устье скважины сигнал с выхода канала связи поступает на устройство съема 3, с него на вход приемника 4, где фильтруется от помех и усиливается. Сигнал с датчика глубины 5 поступает на приемник 6, где фильтруется от помех и усиливается. Выделенные и усиленные полезные сигналы, пропорциональные величине зенитного угла и глубине скважины, подаются на блок вычисления траектории 7, в котором определяется текущее положение ствола скважины в пространстве. Полученные данные заносятся в буфер запоминающего устройства 8 и передаются на один из входов вычислительного блока 10. На второй вход передается информация о проектной траектории и свойствах породы из блока хранения 9. Данные о требуемом угле искривления и свойствах пород на текущем участке передаются на вход задатчика 11, который и формирует текущее задание.
По величине полученного сигнала в блоке 12 формируется сигнал рассогласования и подается на входы пропорционального блока 13 и интегрирующего блока 14, где формируются соответственно пропорциональные и интегральные составляющие управляющего воздействия. Сигналы с выходов пропорционального и интегрального блоков передаются на сумматор 15, где и формируется итоговое управляющее воздействие, передающееся затем на вход регулируемого привода 16, связанного с тормозом буровой лебедки 17, в результате чего изменяется осевая нагрузка на забой в соответствии с законом регулирования и величиной зенитного угла. Это обеспечивает требуемую величину угла искривления скважины.
Если разбить проектную траекторию скважины на участки, на каждом из которых свойства горных пород и проектный зенитный угол неизменны, то процесс автоматического регулирования можно представить следующим образом:
- По проектным данным и значению глубины скважины определяется момент перехода с одного участка на другой.
- Задание на данном участке
 складывается из задания, необходимого для набора данного угла искривления
складывается из задания, необходимого для набора данного угла искривления и поправки на литологические свойства породы
и поправки на литологические свойства породы  :
: 
- По показаниям датчика зенитного угла определяется текущий угол искривления скважины
 .
.
- Вычисляется угол рассогласования
- По заданному закону регулирования вычисляется управляющее воздействие
 , подаваемое на забой
, подаваемое на забой  , где
, где  - пропорциональный коэффициент настройки регулятора,
- пропорциональный коэффициент настройки регулятора,  - интегральный коэффициент настройки регулятора.
- интегральный коэффициент настройки регулятора.
Для определения степени соответствия реальной и проектной траекторий, предлагается следующий критерий оптимальности:
отклонение ствола скважины на заданной глубине можно оценить по формуле:
 ,
, где
 - рассматриваемая глубина,
- рассматриваемая глубина,  - проектные пространственные координаты на данной глубине, - действительные пространственные координаты на данной глубине.
- проектные пространственные координаты на данной глубине, - действительные пространственные координаты на данной глубине.Общее отклонение по длине скважины составляет
 . Минимизация данного критерия достигается при повышении точности проходки. Данный критерий предлагается использовать в системе адаптивного управления процессом искривления.
. Минимизация данного критерия достигается при повышении точности проходки. Данный критерий предлагается использовать в системе адаптивного управления процессом искривления. Скважина должна быть пробурена в кратчайший срок, что учитывают критерии максимальной рейсовой скорости, механической скорости, технической скорости бурения. Для отражения этого условия, в критерий вводится дополнительная составляющая, отражающая максимальную механическую скорость бурения

В реальных производственных условиях управляющее воздействие всегда конечно. Кроме того, его значение не должно превышать некоторые пределы, зависящие от конструкции бурового станка, его прочностных характеристик, параметров бурового раствора. Для математического отражения данных ограничений вводят краевые и граничные условия, заданные в виде неравенств и равенств. Наличие граничных условий позволяет выбрать одно решение, минимизирующее критерий оптимальности.
При бурении скважины на нефть и природный газ наиболее важно достичь проектной точки окончания скважины. Для этого важно обеспечить максимальную точность проводки на финальном этапе бурения. При отклонении ствола скважины в средней части бурения есть возможность изменить управляющее воздействие и вернуться на проектный курс. Таким образом, критерий должен отражать усиление требований к точности проводки на финальном этапе, в то время как средней части ствола скорость бурения можно увеличить. Данное предложение можно реализовать введением переменных коэффициентов пропорциональности K1 и К2. Для отражения этого, предложен следующий критерий:

Форма представления параметров К влияет на степень точности проводки. Возможно несколько вариантов:
- Линейная пропорциональность

- Экспоненциальная зависимость
- Гармоническая пропорциональность.
 Для реализации системы регулирования в условиях недостаточной информации об объекте предлагается алгоритм настройки параметров регулятора.
Для реализации системы регулирования в условиях недостаточной информации об объекте предлагается алгоритм настройки параметров регулятора. Установлено наличие зависимости коэффициента передачи регулятора К от величины А:
 ,
, где
 .
.Используется ПИД закон регулирования с подстройкой коэффициента пропорциональности регулятора:
 ,
, где n=0,1,2… - номер шага коррекции коэффициента передачи.
 - коэффициент, учитывающий качество регулирования,
- коэффициент, учитывающий качество регулирования,  ,
,  - коэффициент пропорциональности регулятора
- коэффициент пропорциональности регулятораВ предложенном законе регулирования постоянные интегрирования и дифференцирования не меняются. Для более точной подстройки параметров предложен следующий алгоритм:
Введем переменные
 :
: 
где y(T) – значение выходной величины в момент времени T от начала переходного процесса. Значение Т влияет только на скорость настройки параметров, но не влияет на качество переходного процесса.
Закон настройки постоянных времени выглядит следующим образом:


Критерий останова процесса подстройки - сходимость коэффициентов:

Проведено имитационное моделирование адаптивной системы автоматического регулирования . При изменении параметров системы с ПИД регулятором на 20%, снижаются показатели регулирования, при уменьшении плотности бурового раствора на 43% система становится неустойчивой.
Использование алгоритма адаптации возвращает объект в устойчивое положение за 23, 24 и 19 итерации. Переходные процессы представлены на рис. 5.
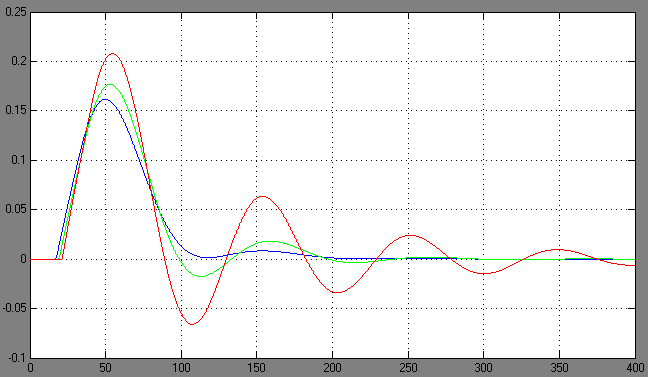

Рис. 5. Переходные процессы в адаптивной АСР
На рисунке 5 – переходный процесс при изменении плотности бурового раствора на 35% при использовании ПИД регулятора, на графике 2 – адаптивный регулятор после 5 итераций, на графике 3 – после 23 итераций.
Данная адаптивная система регулирования может быть использована для управления бурением наклонно-направленных скважин, а также для предотвращения естественного искривления.
В заключении приводятся результаты и выводы приведенной работы.
Основные выводы
- Проведен анализ систем автоматического контроля и регулирования пространственного положения ствола скважины. Установлено, что в настоящее время не существует единого решения, позволяющего автоматически управлять зенитным углом искривления ствола бурящейся скважины в процессе бурения при воздействии возмущений.
- На основании анализа систем контроля забойных параметров, установлено, что наибольшей точностью измерения обладают забойные средства измерения.
- Разработан принципиально новый датчик зенитного угла искривления ствола скважины (патент РФ № 2349750).
- Проведен выбор канала связи между забоем и поверхностью скважины, определены параметры комбинированного электро-гидравлического канала связи.
- На основе выбранных технических средств разработана система автоматического регулирования зенитного угла искривления ствола скважины (№ RU 2380537С1)
- Проведен анализ процесса бурения, как объекта автоматического управления, выделены основные управляющие, управляемые и возмущающие воздействия.
- Построена математическая модель процесса искривления ствола скважины в зенитной плоскости. Показано, что можно использовать осевую нагрузку на долото для управления зенитным углом. Проведена проверка адекватности по критерию Фишера, доверительная вероятность составляет 95%.
- Представлен критерий оптимальности для управления траекторией ствола бурящейся скважины, учитывающий разницу в проектных и реальных координатах ствола, и общую протяженность скважины.
- Синтезирована адаптивная система автоматического регулирования зенитного угла искривления ствола скважины, проведено имитационное моделирование. Показано, что алгоритм адаптации увеличивает точность регулирования при воздействии возмущений на объект управления. Время регулирования сократилось в 1.8 раза, колебательность снизилась на 49%, перерегулирование уменьшилось на 14%.
Список основных работ по теме диссертации
- Никульшин И.В.. Анализ существующих разработок в области автоматизации наклонно направленного бурения. НТЖ строительство нефтяных и газовых скважин на суше и на море. ВНИИОЭНГ. №7, 2010.-29-30с.
- Есауленко В.Н., Погуляева А.М., Никульшин И.В. Экспериментальное исследование типового струйного преобразователя перемещение-частота для контроля забойных параметров. НТЖ Автоматизация, телемеханизация и связь в нефтяной промышленности. ВНИИОЭНГ. №6, 2008.- 2-4с.
- Есауленко В.Н., Никульшин И.В., Погуляева А.М., Математическая модель аэродинамического датчика зенитного угла искривления ствола скважины. Известия высших учебных заведений. Северо-Кавказский регион. Технические науки. №1, 2009г. 110-113 с.
- Никульшин И.В. Система автоматического регулирования зенитного угла искривления ствола скважины. НТЖ Автоматизация, телемеханизация и связь в нефтяной промышленности. ВНИИОЭНГ. №10, 2010.- 37-38с.
- Никульшин И.В., Есауленко В.Н., Григулецкий В.Г. Построение математической модели процесса искривления ствола бурящейся скважины. НТЖ Автоматизация, телемеханизация и связь в нефтяной промышленности. ВНИИОЭНГ. №11, 2010.- 32-35с
- Патент РФ № 2349750. Есауленко В.Н., Дегтярева А.М., Есауленко Н.В., Никульшин И.В. Устройство для измерения зенитного угла искривления скважины.
- Патент № RU 2380537С1 2008г. Есауленко В.Н., Никульшин И.В., Есауленко Н.В., Григулецкий В.Г.. Устройство автоматического регулирования зенитного угла искривления скважины. Опубл. 27.01.10. Бюл.№29.
Подписано в печать Формат 60x90/16.
Тираж 100 экз. Заказ № 919 от 16.11.2010 г.
Отпечатано в типографии издательства АГТУ.
г
 .Астрахань, ул. Татищева, 16.
.Астрахань, ул. Татищева, 16.