
Сводный научный отчет за 2010 г по совместному проекту «Разработка объектно-ориентированных программных моделей и баз данных для систем планирования и осуществления интеллектуальных динамических миссий подводных роботов»,
| Вид материала | Отчет |
- Ландшафт области управления данными: аналитический обзор, 531.27kb.
- Развитие объектно-ориентированных систем управления базами данных, 122.52kb.
- Концепция баз данных уже давно стала определяющим фактором при создании эффективных, 293.58kb.
- Реферат "Принципы проектирования и использования многомерных баз данных" Введение, 295.28kb.
- Учебной дисциплины «Базы данных» для направления 010200. 62 «Математика и компьютерные, 55.58kb.
- Учебной дисциплины «Базы данных» для направления 010400. 62 «Прикладная математика, 50.44kb.
- Дипломная работа студента, 601.76kb.
- Учебное пособие Допущено Министерством образования Российской Федерации в качестве, 2582.59kb.
- Проектирование базы данных, 642.58kb.
- Программа учебной дисциплины " публикация баз данных в интернете, 81.35kb.
УЧРЕЖДЕНИЕ РОССИЙСКОЙ АКАДЕМИИ НАУК
ИНСТИТУТ ДИНАМИКИ СИСТЕМ И ТЕОРИИ УПРАВЛЕНИЯ
СИБИРСКОГО ОТДЕЛЕНИЯ РАН
УТВЕРЖДАЮ
Директор ИДСТУ СО РАН
чл.-к. РАН
И.В. Бычков
СВОДНЫЙ НАУЧНЫЙ ОТЧЕТ
за 2010 г.
по совместному проекту «Разработка объектно-ориентированных программных моделей и баз данных для систем планирования и осуществления интеллектуальных динамических миссий подводных роботов», №45
| Одобрен Учёным Советом ИДСТУ СО РАН протокол № 13 от 16.11.2009 г. | |
Научный координатор проекта:
чл.-к. РАН И.В. Бычков
ИРКУТСК 2010 г.
(промежуточный, 2 этап)
- Раздел конкурса – Совместные проекты ДВО РАН – СО РАН.
- Название проекта: «Разработка объектно-ориентированных программных моделей и баз данных для систем планирования и осуществления интеллектуальных динамических миссий подводных роботов», №45
- Объявленные в исходной заявке цели проекта:
В рамках проекта ИДСТУ СО РАН - ИПМТ ДВО РАН продолжаются совместные исследования по проблемам разработки интеллектуальных систем управления и навигации автономных необитаемых подводных аппаратов (АНПА) – автономных подводных роботов, и построения геоинформационных систем АНПА. На данном этапе проблема состоит в разработке объектно-ориентированных моделей и алгоритмов планирования и осуществления интеллектуальных динамических миссий в сложной среде
Планом проекта предусмотрены исследования по следующим направлениям:
- Исследование возможности автоматизации процессов управления системами движущихся объектов и расширения потенциала управления путем использования некоторых известных и новых методов представления и обработки знаний (исчисления позитивно-образованных формул). Модификации исчисления ПО-формул для применения в задачах удовлетворения ограничений (constraint satisfaction problems) и логического программирования в ограничениях (constraint logic programming) с приложениями в интеллектном управлении движущимися объектами.
- Разработка специальных логических средств и исследование принципиальных вопросов применения этих средств для моделирования функционирования и управления движущимися объектами, в том числе к АНПА.
- Разработка новых алгоритмов для распараллеливания логических выводов в исчислении ПО-формул, что позволит более эффективно реализовывать исчисления на вычислительных кластерах.
- Исследование свойства дискретно-событийной модели взаимодействия основных подсистем АНПА, представляющей смешанное произведение ДСС-моделей подсистем АНПА.
- Построение ДСС-модели группы АНПА на основе ДСС-представления каждого из них. Моделирование поведения группы аппаратов. Формализация и исследование динамических свойств типа живучести группы аппаратов в процессе выполнения поставленной задачи. Применение логико-алгебраического метода получения условий сохранения свойств многоосновных алгебраических систем для исследования поведения отдельных АНПА и групп АНПА при возможных изменениях структуры формации и других возмущениях.
- Адаптация разработанного на первом этапе подхода к планированию динамических миссий для группы АНПА, основанного на генетическом алгоритме, для решения задач патрулирования местности и защиты акватории на трехмерной модели рельефа.
- Разработка алгоритма интеллектуальной расстановки целей при различных постановках подводных миссий для группы АНПА, в т.ч. создания «мнимых целей», ускоряющих поиск решений при жестких ограничениях на связь между аппаратами.
- Доработка комплекса "ВФЛ-РЕДУКТОР" в следующих направлениях:
Расширение класса исследуемых динамических систем -
- непрерывно-дискретные системы с многочастотным асинхронным квантованием (с децентрализованным цифровым управлением);
- системы с полиномиальными и полиноминально ограниченными нелинейностями, а также нелинейностями, ограниченными полуоднородными функциями.
- Автоматизация процедуры преобразования исходных нелинейных уравнений динамики формаций в типовые представления моделей пакета “ВФЛ-РЕДУКТОР”.
- Расчет управления и исследование устойчивости для формаций с движением вблизи заданного маршрута.
- Программная реализация базы данных точечных ориентиров с информацией о точности определения их координат. Разработка структуры данных, позволяющие представить информацию о положении обнаруженных объектов и точности определения этого положения, поступающую от других подсистем АНПА
- Степень выполнения поставленных в проекте задач.
План первого года научных исследований по всем разделам проекта выполнен.
Составлены и согласованы планы совместных работ исполнителей проекта: ИПМТ ДВО РАН, ИДСТУ СО РАН по разделам и конкретным задачам проекта. В результате совместных обсуждений выработано направление исследований.
Проведены научные семинары по обмену информацией в части выполнения совместных работ. Представители ИПМТ ДВО РАН и ИДСТУ СО РАН принимали участие с совместными докладами на конференциях по тематике проекта.
ИПМТ ДВО РАН предоставлена информация для проведения исследований по соответствующим разделам и планам работ.
Определены актуальные нерешенные теоретические и технические проблемы создания групп интеллектуальных АНПА.
- Количество основных исполнителей проекта (в том числе студентов, аспирантов, молодых ученых) – ИПМТ ДВО РАН - 11, ИДСТУ СО РАН - 12 чел.
- Полученные за отчетный период важнейшие результаты.
Институт динамики систем и теории управления СО РАН
Разработано новое правило вывода для расширенного (с функциональными символами) исчисления ПО-формул. Доказана корректность и полнота исчисления с новым правилом вывода. Разработана новая, полная стратегия поиска логических выводов в полученном исчислении, которая позволяет сократить комбинаторное пространство поиска.
Разработан подход к решению задачи эффективной охраны морской акватории группой автономных необитаемых подводных аппаратов (АНПА). Под охраной понимается совокупность таких подзадач, как патрулирование периметра, распределение аппаратов группы по зонам особого внимания с заданными приоритетами, расчет маршрутов распределения, построение миссий АНПА обследования рельефа дна акватории с заданной частотой.
В задаче патрулирования периметра акватории группой АНПА с ограниченными зонами видимости найдены параметры движения (в плоском варианте), обеспечивающие гарантированное обнаружение посторонних динамических объектов, пересекающих охраняемый периметр при известных соотношениях скоростей нарушителя и патрулей.
Развивается подход к моделированию и исследованию свойств групп АНПА на основе дискретно-событийного представления. Рассмотрено свойство живучести группы АНПА в процессе выполнения поставленной задачи, которое трактуется как свойство неблокирования супервизора, управляющего действиями группы.
Зоны видимости
АНПА


Р
max D()
ис. 1. К подзадаче патрулирования периметра акватории.
В рамках подзадачи охраны морской акватории предложена ДСС-модель, на основе которой разработаны алгоритмы распределения АНПА между заданными областями исследуемой акватории. Исследована устойчивость этих алгоритмов управления. При этом изменение структуры формации - изменение численности АНПА в группе, временный выход из строя или отсутствие связи с АНПА вследствие различных причин - выступает в качестве новых начальных данных и запускает новый процесс распределения АНПА.
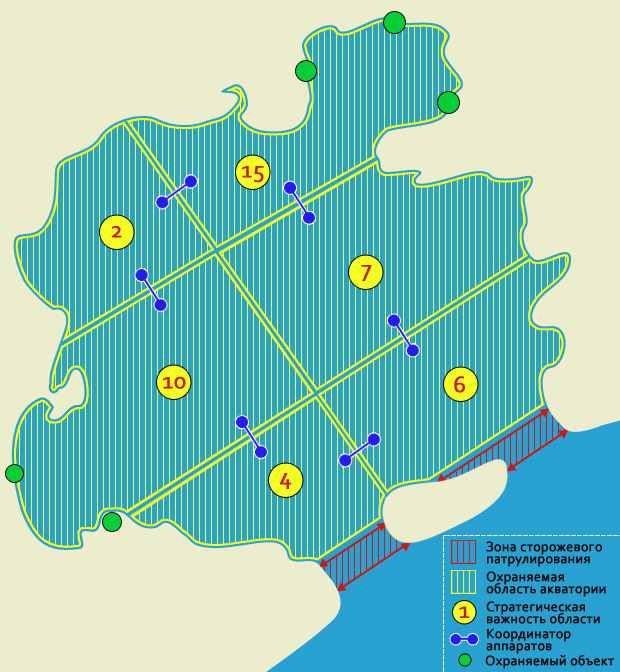
Рис. 2. Схема охраны акватории.
Планирование миссий отдельных АНПА происходит на основе генетического алгоритма, позволяющего решать задачи большой комбинаторной сложности и обеспечивающего получение приемлемого решения (удовлетворяющего основным ограничениям) в любой момент остановки вычислений.
Проведена модификация генетического алгоритма планирования многоцелевых миссий группы АНПА, для работы на трехмерном рельефе в задаче патрулирования акватории. Маршруты аппаратов при перемещении между целями (дуги в графе целей миссии и их вес) просчитываются при помощи модификации алгоритма А*, позволяющей учитывать ограничения на передвижение аппаратов в пространстве. В связи с появлением третьего измерения был изменен алгоритм определения наличия связи внутри группы, разграничены понятия препятствия и запретной зоны. Так как некоторые цели исследования невозможно задать в виде одной пары координат (например, протяженные объекты), была добавлена возможность построения маршрутов аппаратов в окрестности фиксированной миссии одного или нескольких АНПА из этой подгруппы.
Для генерации маршрутов движения АНПА при обследовании рельефа дна используются алгоритмы, основанные на построении минимального остовного дерева и соответствующего ему гамильтонова цикла (контура) на регулярной сетке. Эта сетка получается как результат разбиения акватории на равные квадратные участки, размер которых определяется измерительными возможностями АНПА. Движение группы АНПА по траектории, соответствующей построенному гамильтонову циклу, можно задавать различными способами: 1) все объекты циклически движутся с постоянной скоростью вдоль траектории на некотором расстоянии друг от друга; 2) для каждого АНПА выделяется участок траектории, по которому он должен курсировать из одной его крайней точки в другую.
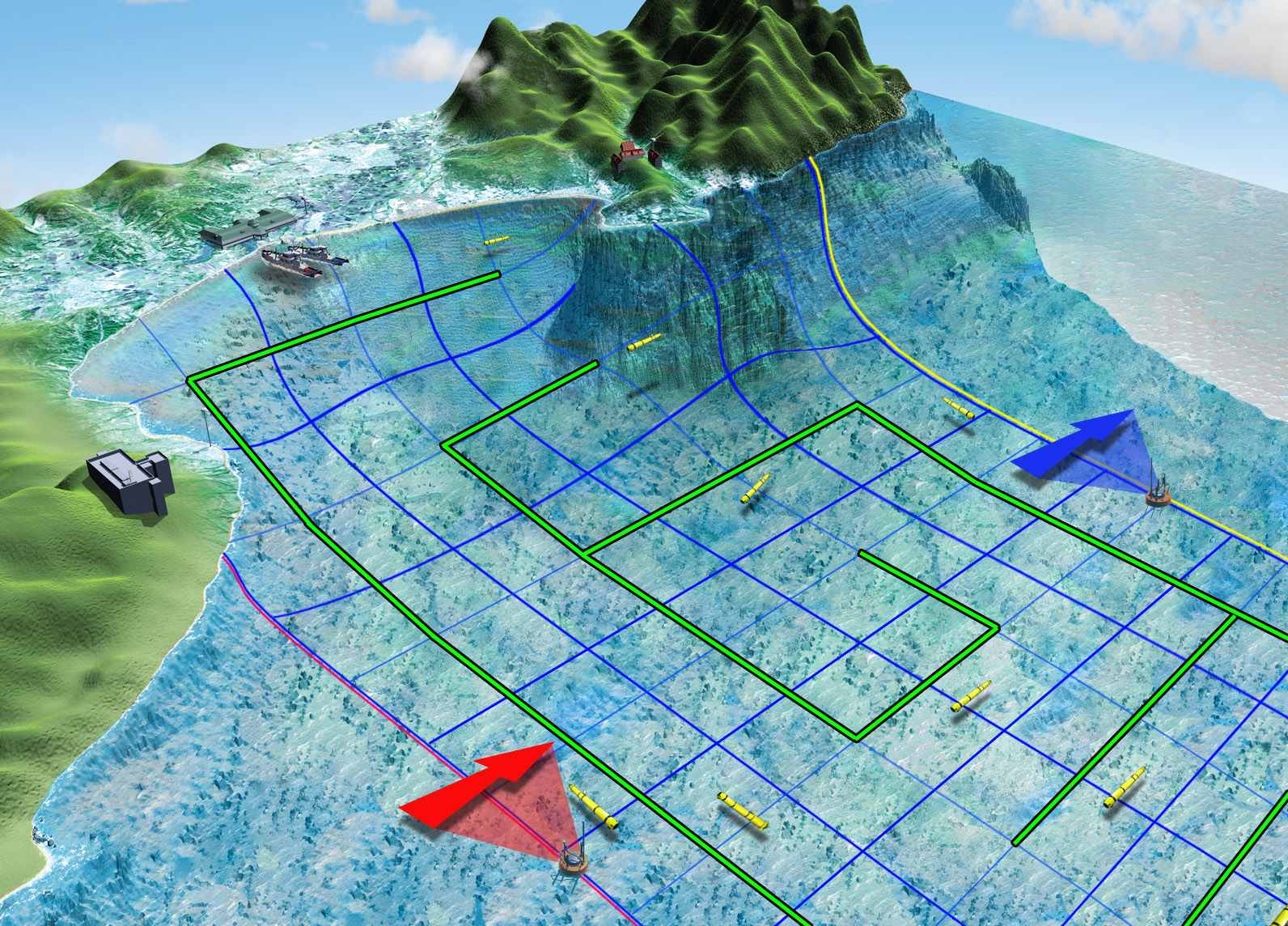
Рис. 3. Пример построенного остовного дерева для одной области с заданным
приоритетом.
Для отладки и проверки эффективности высокоуровневых алгоритмов управления группой АНПА, отработки их миссий разработан моделирующий программный комплекс на основе принципа модульного построения программ и технологии трехмерной визуализации, базирующейся на библиотеке Irrlicht. Комплекс предоставляет удобные средства для описания миссий АНПА, интерфейс для подключения внешних программ планирования действий, написанных на языке Пролог; позволяет автоматически генерировать рельеф дна, в динамике отображать подводную обстановку. В комплексе реализована модель многолучевого гидролокатора бокового обзора (ГБО).
Предложена технология хранения и обработки картографических данных, которая основана на использовании регулярной сетки, в узлах которой хранятся оценки высот, вычисляемые по показаниям бортовых датчиков с учетом ограничений, обусловленных маневренностью АНПА.
Рис. 4. Рельеф дна реальный (вверху) и рельеф, восстановленный по данным ГБО.
Развивается пакет программ "ВФЛ-РЕДУКТОР" для анализа и синтеза непрерывно-дискретных управляемых систем.
С использованием пакета "ВФЛ-РЕДУКТОР" проведены расчеты децентрализованного автономного управления по принципу "лидер-ведомый" для группы подводных роботов с конфигурацией в виде дерева. Лидер группировки задает ее движение в целом и может совершать линейные и угловые маневры, заранее не известные всем остальным членам группы. Ведомые управляют своим вектором скорости так, чтобы удерживать заданную дистанцию до своего лидера и угол пеленга. Управление строится с использованием измерителей дистанций и углов пеленга, а также наблюдателей первого порядка для получения оценок скоростей (неполнота измерений). Рассмотрены различные варианты формирования стабилизирующих управлений, в том числе дискретных, учитывались неопределенности масс аппаратов и сил сопротивления, погрешности элементов системы и другие факторы, присущие реальной ситуации. Моделирование показало вполне приемлемое качество синтезированного управления.
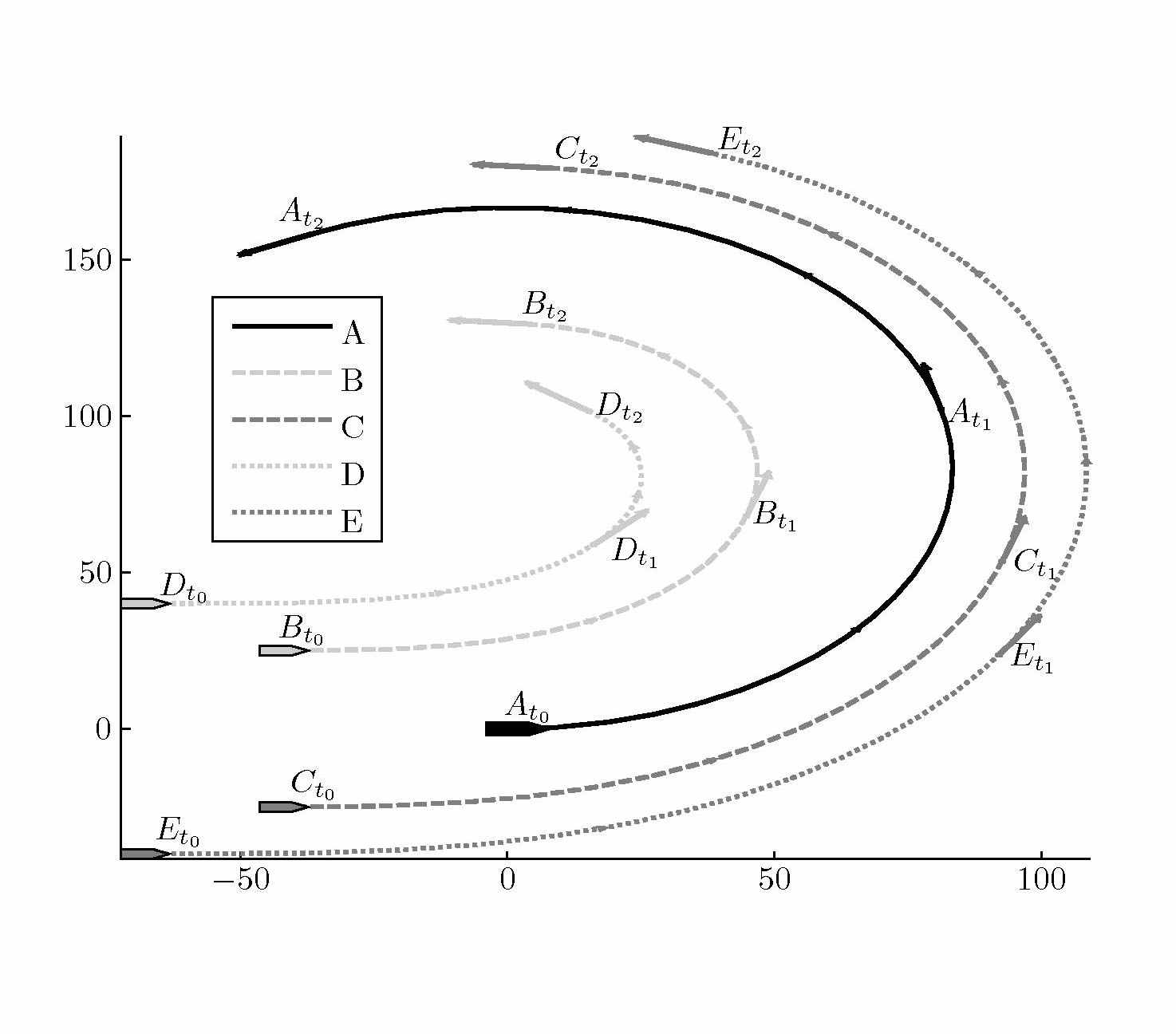
Рис. 5. Пример маршрутов группы АНА при стабилизации дистанций и углов пеленга между парами АНПА.
С целью создания эффективной бортовой ГИС АНПА разработан формат файлов MRG (Multi-Resolution Grid) для иерархического представления целочисленных растровых данных большого объёма. Были предложены и исследованы новые методы интерполяции и сжатия данных, в результате применения которых объём упакованных данных сократился на 20%. Предложенный формат может быть использован для работы с матрицами высот и растровыми данными дистанционного зондирования большого объёма.
Программно реализован алгоритм быстрой генерации модельных ГБО изображений, получаемых с ГБО в модели внешней среды АНПА с использованием возможностей графических ускорителей.
Алгоритм заключается в следующем:
1. Получение вспомогательное графическое изображение, поместив источник света и камеру в точку, в которой расположен ГБО. Изображение должно охватывать область, которую затрагивают акустические сигналы гидролокатора. При этом собирается информация об отражениях от всех объектов, расположенных в области действия прибора.
2. С использованием шейдеров графического ускорителя для каждого пиксела изображения вычисляется и сила отклика (яркость), и его расстояние до источника сигнала (формируется буфер глубины пикселов). При этом вычисленные величины могут быть закодированы в компонентах результирующего изображения. К сожалению, не удаётся представить таким образом ещё и процесс вычисления строки ГБО, но его удаётся максимально упростить.
3. При известном расстоянии от каждого пиксела вспомогательного изображения до камеры вычисляется, в значение какого элемента строки ГБО изображения вносит вклад этот пиксел. Таким образом, результирующая строка вычисляется, как взвешенная гистограмма буфера глубины, в которой весом пиксела является его яркость на вспомогательном изображении.
Рис.6. Модельное ГБО изображение.
Институт проблем морских технологий ДВО РАН
Разработан алгоритм идентификации искусственных протяженных объектов (ИПО) по данным гидролокатора бокового обзора. К достоинствам алгоритма следует отнести низкую ресурсоемкость (эхограмма гидролокатора обрабатывается построчно по мере поступления новой информации), что позволяет идентифицировать ИПО в реальном масштабе времени на борту АНПА.
Разработаны алгоритмы управления подводным роботом при решении задач инспекции подводных протяженных объектов (кабелей, трубопроводов) на основе распознавания гидролокационных изображений, включающий следующие этапы: поиск и обнаружение ИПО, отслеживание ИПО, обследование потенциально опасных мест, возвращение АНПА и съемка окрестности инспектируемого объекта.
Разработана система моделирования и постобработки данных бортового навигационного комплекса АНПА, основанная на алгоритмах навигационной коррекции и использовании пакетов прикладных программ, допускающих представление в визуальной среде.
Р
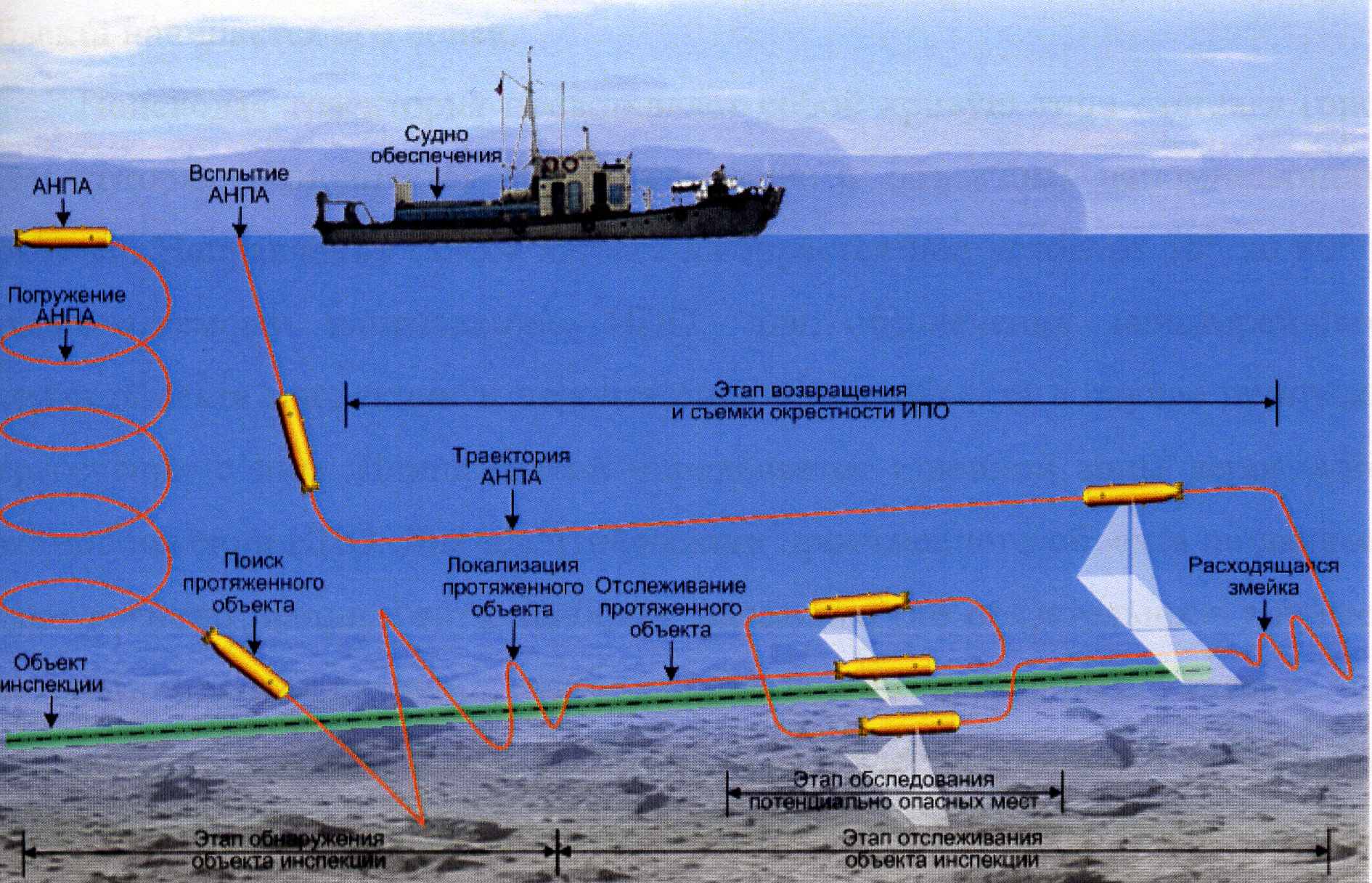
ис.7. Инспекция протяженного объекта.
Исследованы на вычислительных моделях алгоритмы обработки пространственной информации, необходимой для управления АНПА при планировании и осуществлении оптимальных маршрутов в условиях малоизвестного рельефа дна.
Модифицирована разработанная на предыдущем этапе программа-симулятор, выполняющая следующие функции:
- моделирование миссий одиночных и групп АНПА;
- визуализацию процесса поиска решения;
- генерацию форм рельефа, распределение точек-целей, поиск и визуальный вывод кратчайших путей между ними,
- симуляцию движения аппарата, а также ряд других функций по имитационной отладке систем и средств управления.
6. Степень новизны полученных результатов:
Исследования выполнены в соответствие с планом, в котором были отражены задачи, требующие новых и развития ранее пронятых решений. Результаты, полученные на данном этапе исследований, рассматриваются как следующий шаг в совершенствовании средств и методов построения объектно-ориентированных систем планирования и осуществления интеллектуальных динамических миссий подводных роботов. В этом отношении можно особо отметить новизну и актуальность следующих исследований:
Развитие средств высокоточного навигационного обеспечения и ориентирования в среде, расширение объема и информативности средств поиска и визуального представления данных для управления автономным аппаратом.
Развитие методов «интеллектуального» управления, имеющих ряд существенных особенностей по сравнению с другими управляемыми объектами. Сюда можно отнести, например, разработку алгоритмических и программных средств моделирования и анализа изображений подводных объектов.
Непосредственная связь проводимых исследований с практическими работами ИПМТ ДВО РАН по созданию и использованию АНПА для решения различных задач поиска и обследования объектов на дне океанов и морей, геологической разведки, мониторинга водной среды. Разработанная структура систем АНПА, алгоритмы управления с учетом новых задач и функциональных требований позволяют повысить надежность и точность навигационно-управляющего комплекса при обследовании морской среды, природных и инженерных объектов.
Разработанные совместно в ИПМТ ДВО РАН и ИДСТУ СО РАН модели систем пространственных наблюдений и формирования на их основе специализированной ГИС является новыми для решения задач планирования движения АНПА. Полученные результаты нашли применение при организации управления группировками АНПА.
- План на 2011 г.
1. Разработка программной системы для автоматического доказательства теорем в новом расширенном исчислении ПО-формул.
2. Разработка обратного вывода в новом исчислении и его реализация в виде программной системы; для внедрения в программный комплекс для отладки и проверки эффективности высокоуровневых интеллектуальных алгоритмов управления группой АНПА.
3. Постановки и математическая формализация некоторых типовых задач устойчивости формаций движущихся автономных объектов с изменениями состава и реконфигурацией (вследствие отказов и (или) вхождения новых агентов). Разработка подходов к исследованию сформулированных динамических свойств на основе метода ВФЛ и программного комплекса "ВФЛ-РЕДУКТОР".
4. Программная реализация в пакете программ "ВФЛ-РЕДУКТОР" разработанных в 2010 г. модификаций алгоритмов, позволяющих расширить классы исследуемых нелинейных динамических объектов, повысить эффективность анализа многокомпонентных систем с каскадной структурой, полнее учитывая особенности задач управления и устойчивости конфигураций группового движения автономных подводных роботов в условиях неопределенности.
5. Разработать алгоритм моделирования работы ГБО в модели внешней среды АНПА. Для моделирования работы ГБО должны быть использованы возможности графического ускорителя. В результате должны формироваться модельные ГБО-изображения, позволяющие выполнять отладку алгоритмов анализа таких изображений.
6. Разработать структуры данных, предназначенные для анализа информации, получаемой от одного или нескольких ГБО изображений и, возможно, других источников информации о состоянии внешней среды АНПА.
7. Развитие и применение методов супервизорного управления дискретно-событийными системами для обеспечения выполнением группой АНПА поставленной перед нею миссии. Формализация и исследование динамических свойств группировки, необходимых в задаче охраны и исследования акватории.
8. Развитие метода логико-алгебраических уравнений и получение с его помощью теорем о свойствах группировки АНПА при изменении ее структурных характеристик.
9. Адаптация генетических алгоритмов нахождения миссий группы АНПА в задаче покрытия морской акватории.
8. Список публикаций
Совместные публикации:
1. Р.И.Козлов, Н.Н.Максимкин, Л.В.Киселев, С.А.Ульянов. Устойчивость
конфигураций группового движения автономных подводных роботов в условиях
неопределенности // Подводные исследования и робототехника, N 1(9), 2010,
с. 40-46.
4. Козлов Р.И., Максимкин Н.Н., Киселев Л.В., Ульянов С.А. Устойчивость
группировок движущихся объектов с децентрализованным дискретным управлением
// Тезисы докладов Международной конференции "Системный анализ, управление
и навигация", Евпатория, 2010, с.74-75.
3. И.В. Бычков, А.В. Давыдов, М.Ю. Кензин, Н.Н. Максимкин, Н.В. Нагул, А.В. Инзарцев, Л.В. Киселев. Интеллектуальное управление группой подводных роботов в
задаче охраны акватории // Тезисы докладов Международной конференции "Системный анализ, управление и навигация", Евпатория, 2010, с.70-71.
4. Бычков И.В., Максимкин Н.Н., Кензин М.Ю., Нагул Н.В., Киселев Л.В. Управление группой подводных роботов при патрулировании морской акватории // Материалы XXVII конференции памяти Н.Н. Острякова – Санкт-Петербург, 2010 – С.39
ИДСТУ СО РАН
- Давыдов А.В., Ларионов А.А., Черкашин «Об исчислении позитивно-образованных формул для автоматического доказательства теорем» //"Моделирование и анализ информационных систем" №4 — спец. выпуск посвященный Международному семинару PSSV-2010, 2010, принято к печати.
- Нагул Н.В. Сохранение свойств расписания движения в одной модели сети общественного транспорта // Современные технологии, системный анализ, моделирование. - 2010, принято к печати.
- Нагул Н.В. О классах свойств, сохраняющихся при морфизмах некоторых обобщений многоосновных алгебраических систем // Тезисы докладов международной конференции «Мальцевские чтения», г. Новосибирск, 2-6 мая 2010 г., С. 139.
- Нагул Н.В. О применении в динамике некоторых обобщений многоосновных алгебраических систем // Тезисы докладов международной конференции «Алгебра, логика и ее приложения», г. Красноярск, 19 – 25 июля 2010 г., С. 66-67.
- Р.И.Козлов, С.А.Ульянов. Синтез робастного управления с использованием сублинейных ВФЛ // Тр. конференции "Управление в технических системах" (УТС-2010), С.-Петербург, 2010, с. 17-21.
- Р.И.Козлов, С.А.Ульянов. Устойчивость движущихся формаций с дискретным управлением в условиях неопределенности // Устойчивость и колебания нелинейных систем управления. Тезисы докладов XI Международной конференции. Москва, ИПУ РАН, 2010, с. 174-176.
- Р.И.Козлов, С.А.Ульянов. Toolbox для исследования динамики нелинейных непрерывно-дискретных управляемых систем с неопределенностями // Тезисы докладов X Крымской международной математической школы "Метод функций Ляпунова и его приложения" (MFL-2010), Крым, Алушта, 2010, с. 13-14.
- Бычков И. В., Новицкий Ю. А., Ружников Г. М., Хмельнов А. Е. Генерализация площадных объектов векторной карты с использованием алгоритмов обработки триангуляции // Горный информционно-аналитический бюллетень (научно-технический журнал). — 2009. — № отдельный выпуск 17. — С. 158 – 162.
- Бычков И. В., Фереферов Е. С., Новицкий Ю. А., Ружников Г. М., Хмельнов А. Е. Организация работы с электронными картами исключающая утечку векторной информации // Горный информационно-аналитический бюллетень (научно-технический журнал). — 2009. — № Отдельный выпуск 18. — С. 220 – 224.
- Бычков И. В., Ружников Г. М., Хмельнов А. Е., Гаченко А. С., Фёдоров Р. К. Технологии формирования и ведения базовых пространственных данных // Геоинформатика: технологии, научные проекты, Тезисы II международной конференции — Барнаул: АРТ, 2010. — С. 26 – 26.
- Хмельнов А. Е., Хмельнова Т. Ф. Форматы файлов и алгоритмы сжатия без потерь для иерархического представления целочисленных растровых данных большого объёма // Системный анализ, управление и навигация — Крым, Евпатория: МАИ-ПРИНТ, 2010. — С. 79 – 79.
ИПМТ ДВО РАН:
1.А.В.Инзарцев, Л.В.Киселев, Ю.В.Матвиенко. Навигация и управление автономных подводных роботов // Известия ЮФУ.Технические науки, №3, 2010, с.164-169.
2. Р.И.Козлов, Н.Н.Максимкин, Л.В.Киселев, С.А.Ульянов. Устойчивость конфигураций группового движения автономных подводных роботов в условиях неопределенности // Подводные исследования и робототехника, N 1(9), 2010, с. 40-46.
3. Л.В.Киселев. Приоритеты подводной робототехники//Наука в России, №4, 20010 (в печати).
4. Inzartsev A.V, Kiselyov L.V, Medvedev A.V, Pavin A.M. Autonomous Underwater Vehicle Motion Control during Bottom Objects and Hard-to-Reach Areas Investigation/In book "Motion Control", InTech, Vienna, Austria, 2010. P.207-228.
5. Inzartsev A.V, Kiselyov L.V, Matviyenko Yu.V and all. Integrated Positioning System of Autonomous Underwater Robot and Its Application in High Latitudes of Arctic Zone /In book "Motion Control", InTech, Vienna, Austria, 2010. P.229-244.
6. Ю.В.Ваулин, Ю.Р. Дубовой. Система моделирования и постобработки данных бортовых навигационных систем АНПА // Подводные исследования и робототехника, N 1(9), 2010, с. 22-28.
7. А.М.Павин. Разработка методов инспекции искусственных протяженных объектов с помощью автономного необитаемого подводного аппарата. Канд.диссертация, 2010.
8. Инзарцев А.В., Киселев Л.В., Матвиенко Ю.В., Рылов Н.И. Навигационно-управляющий комплекс многоцелевого автономного подводного робота и особенности его применения в высоких широтах Арктики // Сб.докладов Всероссийской научно-технической конференции «Научное и техническое обеспечение исследований и освоения шельфа Северного Ледовитого океана», Новосибирск, 2010, с.13-18.
9. Участие в научных мероприятиях по тематике проекта.
Результаты работ по проекту докладывались на международных и отечественных научно-технических конференциях:
1. XI Международная конференция "Устойчивость и колебания нелинейных систем управления" (Stab-10). Москва, ИПУ, 1-4 июня 2010 г. Р.И.Козлов, С.А.Ульянов. Устойчивость движущихся формаций с дискретным управлением в условиях неопределенности (30-минутный ключевой доклад).
2. Международная конференция «Системный анализ, управление и навигация»,
Евпатория, 2010, 27 июня – 4 июля 2010 г.
Козлов Р.И., Максимкин Н.Н., Киселев Л.В., Ульянов С.А. Устойчивость
группировок движущихся объектов с децентрализованным дискретным
управлением.
3. Конференция "Управление в технических системах" (УТС-2010),
С.-Петербург, ЦНИИ "Электроприбор", 12 по 14 октября 2010 г.
Р.И.Козлов, С.А.Ульянов. Синтез робастного управления с использованием
сублинейных ВФЛ.
4. X Крымская международная математическая школа "Метод функций Ляпунова и
его приложения" (MFL-2010), Крым, Алушта, 13-18 сентября 2010 г.
Р.И.Козлов, С.А.Ульянов. Toolbox для исследования динамики нелинейных
непрерывно-дискретных управляемых систем с неопределенностями
5. XXVII Конференция памяти Н.Н. Острякова,
С.-Петербург, ЦНИИ "Электроприбор", 12 по 14 октября 2010 г.
И.В. Бычков, М.Ю. Кензин, Н.Н. Максимкин, Н.В. Нагул, Л.В. Киселев. Управление группой подводных роботов при патрулировании морской акватории.
6. Международный семинар «Семантика, спецификация и верификация программ: теория и приложения» г.Казань, 14-15.06.2010 г.
Давыдов А.В., Ларионов А.А. Об исчислении позитивно-образованных формул для автоматического доказательства теорем.
7. Пятая Всероссийская научно-практическая конференция«Перспективные системы и задачи управления». Россия, Карачаево-Черкесская Республика, п. Домбай. 5 - 9 апреля 2010 г.
8. Международная конференция «Системный анализ, управление и навигация»,
Евпатория, 2010, 27 июня – 4 июля 2010 г.
9. Всероссийская научно-техническая конференция «Научное и техническое обеспечение исследований и освоения шельфа Северного Ледовитого океана», Новосибирск, август, 2010 г.
10. 17-я Международная конференция по автоматическому управлению (Автоматика-2010), Украина, Харьков, 27-29 сентября 2010 г.