
Telecommunication technologies телекоммуникационные технологии ( 1, 19 марта 2008 года)
| Вид материала | Документы |
Содержание2.1.1 Влияние шумов и помех 2.2 Представление электрических сигналов в цифровой форме Высокую надежность |
- V международная научно-практическая конференциЯ «информационные и коммуникационные, 290.79kb.
- Спецкурс Java-технологии и практики создания приложений в многоуровневой архитектуре., 81.97kb.
- Lucent technologies, 173.65kb.
- Самостоятельная работа 2 часа в неделю всего часов, 42.09kb.
- Нажмеденова Алтын Габдрешовна Адрес кафедры Толеби, 94, intro 2, корпус 1 Образование, 33.88kb.
- Название проекта, 183.48kb.
- Принят Государственной Думой 4 марта 1998 года Одобрен Советом Федерации 12 марта 1998, 2099.71kb.
- Принят Государственной Думой 4 марта 1998 года Одобрен Советом Федерации 12 марта 1998, 494.6kb.
- Мониторинг по состоянию на 7 апреля 2008 года, 67.86kb.
- Iso 9001-2008 Telecommunication Network Systems Interface Technology, 45.25kb.
2.1.1 Влияние шумов и помех
Семенов Ю.А. (ГНЦ ИТЭФ)

| | Прекрасна благодушная язвительность, с которой в завихрениях истории хохочет бесноватая действительность над мудрым разумением теории. Игорь Губерман |
Шумы определяют емкость канала и задают частоту ошибок при передаче цифровых данных. Шум по своей природе нестабилен и можно говорить лишь о том, что его величина с некоторой вероятностью лежит в определенном интервале значений. Плотность вероятности p(x) определяет вероятность того, что случайный сигнал X имеет значение амплитуды в интервале между x и x+x. При этом вероятность того, что значение х лежит в интервале между x1 и x2 определяется равенством:
 , условием нормировки при этом является равенство
, условием нормировки при этом является равенство  . P(x) – вероятность, а p(x) – плотность вероятности. Вероятность того, что x меньше некоторой величины y равна
. P(x) – вероятность, а p(x) – плотность вероятности. Вероятность того, что x меньше некоторой величины y равна  , откуда следует, что P{x1 <>2} = P(x2) – P{x1}, а
, откуда следует, что P{x1 <>2} = P(x2) – P{x1}, а 
Так называемый белый шум подчиняется непрерывному нормальному (Гауссову) распределению
 , где а – среднее значение x, а – среднеквадратичное отклонение х от a. В случае шумов среднее значение х с учетом полярности часто принимает нулевое значение (а=0).
, где а – среднее значение x, а – среднеквадратичное отклонение х от a. В случае шумов среднее значение х с учетом полярности часто принимает нулевое значение (а=0).В этом случае, если мы хотим знать вероятность того, что амплитуда шумового сигнала лежит в пределах v, то можно воспользоваться выражением

Для вычисления P{x1
 и
и  . Тогда P{x1
. Тогда P{x1 =
=  .
.Распределение P(x) обычно называется функцией ошибок (erf(x) = -erf(-x)). Полезной с практической точки зрения является вероятность
P{-k
 , которая позволяет оценить возможность того, что шумовой сигнал превысит некоторый порог, заданный значением k.
, которая позволяет оценить возможность того, что шумовой сигнал превысит некоторый порог, заданный значением k.Из числа дискретных распределений наиболее часто используемым является распределение Пуассона.
 , где n = 0, 1, 2, …; mP, m – число испытаний. Распределение Пуассона описывает вероятность процессов, где P<<1. При большом значении m отношение n/m приближается к значению вероятности P.
, где n = 0, 1, 2, …; mP, m – число испытаний. Распределение Пуассона описывает вероятность процессов, где P<<1. При большом значении m отношение n/m приближается к значению вероятности P.Среднее значение x
 , а для дискретного распределения
, а для дискретного распределения  . Среднеквадратичное отклонение случайной величины х определяется как:
. Среднеквадратичное отклонение случайной величины х определяется как:  , то же для дискретного распределения
, то же для дискретного распределения 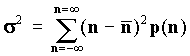 .
.Как уже говорилось, во многих случаях шум имеет гауссово распределение с нулевым средним значением амплитуды. В этих случаях среднее значение мощности шумового сигнала равно вариации функции плотности вероятности. В этом случае отношение сигнал-шум будет равно
 . Если шум носит чисто тепловой характер, то 2=kTB. В общем случае 2 = EnB [Вт], где полоса B измеряется в Гц, En энергия шума.
. Если шум носит чисто тепловой характер, то 2=kTB. В общем случае 2 = EnB [Вт], где полоса B измеряется в Гц, En энергия шума.Шум определяет вероятность ошибки при передаче сообщения по каналу связи и, в конечном итоге, пропускную способность канала (см. теорему Шеннона; раздел 2.1 ссылка скрыта).
2.2 Представление электрических сигналов в цифровой форме
Семенов Ю.А. (ГНЦ ИТЭФ)
Прогресс последних лет в области повышения пропускной способности каналов в заметной мере связан с развитием технологии передачи цифровых данных. Здесь нужно решить проблемы синхронизации, эффективного кодирования и надежной передачи. Чем шире импульс, тем большую энергию он несет, тем лучше отношение сигнал/шум, но тем ниже и предельная скорость передачи. Раньше каждому двоичному разряду соответствовал импульс или перепад в кодовой последовательности. Сегодня перепад возникает лишь при смене последовательности нулей на последовательность единиц или наоборот. Цифровой метод имеет целый ряд преимуществ перед аналоговым:
- Высокую надежность. Если шум ниже входного порога, его влияние не ощущается, возможна повторная посылка кода.
- Отсутствие зависимости от источника информации (звук, изображение или цифровые данные).
- Возможность шифрования, что повышает безопасность передачи.
- Независимость от времени. Можно передавать не тогда, когда информация возникла, а когда готов канал.
На рисунке 2.2.1В представлена уже не последовательность импульсов, а последовательность переходов из одного состояния в другое. При этом уровень +V соответствует логической <1>, а -V - логическому <0>. Переключение из состояния <0> в состояние <1> и наоборот (бод) уже не соответствует передаче одного бита.
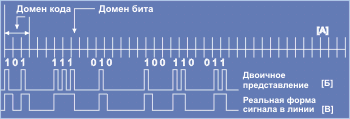
Рис. 2.2.1 Передача цифровых кодов по передающей линии
На практике число нулей или единиц следующих подряд не лимитировано. По этой причине на принимающей стороне при этом рано или поздно возникает проблема синхронизации временных шкал передатчика и приемника. Для решения этой проблемы существует два метода передачи данных: синхронный и асинхронный. Асинхронный метод используется для относительно низкоскоростных каналов передачи и автономного оборудования. Синхронный метод применяется в скоростных каналах и базируется на пересылке синхронизующего тактового сигнала по отдельному каналу или путем совмещения его с передаваемыми данными. При наличии синхронизации приемника и передатчика можно допустить более длинные последовательности нулей или единиц, что способствует повышению пропускной способности. На рис. 2.2.2 показана схема канала, использующая технику импульсно-кодовой модуляции. Импульсно-кодовая модуляция (ИКМ) была предложена в 30-ые годы 20-го века, но реализована лишь в 1962 году.

Рис. 2.2.2. Система коммуникаций с использованием кодово-импульсной модуляции (pcm)
Шаг квантования в АЦП должен быть много меньше диапазона вариации входного сигнала. Число уровней квантования n выбирается из соображений минимизации искажений сигнала и повышения уровня s/n. При разумных предположениях (биполярность сигнала (+V -V), однородность распределения уровня сигнала в рабочем диапазоне, ошибка квантования не более S/2, где S шаг квантования, и т.д.) [S/N]db = 10 log10(22n) = 6n (N - шум квантования при этом равен S2/12). Это означает, что при 2n уровнях квантования и при условии, что входной сигнал может варьироваться во всем рабочем диапазоне АЦП, отношение сигнал-шум (S/N), связанное с самим процессом квантования, будет равно 6n при n=8 это составит 48 дБ). Отсюда следует известное значение относительного расстояния между уровнями квантования, равное 6 дБ. Звуковой сигнал может иметь динамический диапазон 40 дБ, что создает определенные проблемы, которые преодолеваются путем прямого и обратного логарифмического преобразования (см. рис. 2.4.1).
Типичный кадр данных в асинхронном канале начинается со стартового бита, за которым следует 8 битов данных. Завершается такой кадр одним или двумя стоп-битами. Стартовый бит имеет полярность противоположную пассивному состоянию линии и переводит приемник в активное состояние. Пример передачи такого кадра показан на рис. 2.2.3.
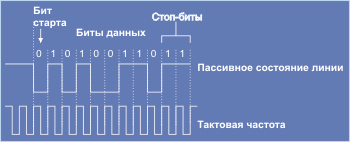
Рис. 2.2.3. Пример передачи кадра в асинхронном режиме
Одним из способов обеспечения надежной синхронизации является применение в приемнике частоты, например, в 8 раз больше частоты следования данных. При этом стробирование данных может производиться примерно в середине сигнала бита (см. рис. 2.2.4).
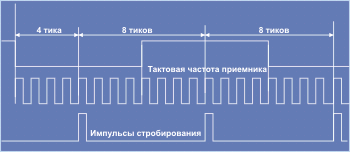
Рис. 2.2.4. Схема синхронизации и стробирования с 8-кратной тактовой частотой приемника
Начальный и стоп-биты на каждый байт данных снижают пропускную способность канала и по этой причине используются только для низких скоростей обмена. Увеличение же длины блока данных приводит к ужесточению требований к точности синхронизации. При использовании синхронного метода передачи необходимы специальные меры для выделения кадра в общем потоке данных. Для решения этой задачи используется специальная сигнатура. Если такая последовательность встретится внутри кадра, она видоизменяется путем ввода в нее двоичных нулей (bit stuffing). Синхронный приемник нуждается в синхронизирующем сигнале, передаваемом передатчиком. Обычно это реализуется путем введения определенного вида кодирования сигнала, например, биполярного кодирования. В этом случае используется три уровня сигнала: +v соответствует логической 1; -v - логическому нулю, а 0 вольт логическому нулю или единице. Пример такого типа кодирования показан на рис. 2.2.5.

Рис. 2.2.5. Пример биполярного кодирования сигнала (схема RZ - return-to-zero)
Другой разновидностью такого рода кодирования является использование манчестерского кода. В этой схеме логической единице и нулю соответствует не уровни напряжения, а перепады. Так логической единице поставлен в соответствие переход с низкого уровня на высокий, а логическому нулю - с высокого на низкий (схема NRZ - non-return-to-zero). Пример представления сигнала с использованием манчестерского кода показан на рис. 2.2.6.
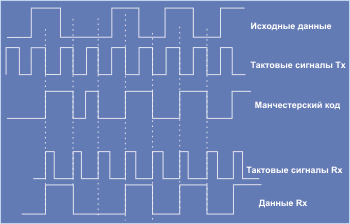
Рис. 2.2.6. Кодирование сигнала с использованием манчестерского кода.
Манчестерский код достаточно неэффективно использует пропускную способность канала. Оба описанные выше кода требуют удвоения полосы для передачи данных. Этого можно избежать, используя схему цифровой фазировки DPLL - Digital Phase Locked Loop). Эта схема предполагает применение кодирования NRZI (non-return-zero-inverted). Здесь сигнал сначала кодируется с использованием кода NRZ и только затем последовательность преобразуется в NRZI. В процессе такого преобразования логический нуль из NRZ вызывает определенную модификацию исходного кода, в то время как логическая единица не приводит ни к каким вариациям. Здесь создаются условия, при которых количество переходов 0/1 и 1/0 в единицу времени достаточно велико, чтобы обеспечить надежную синхронизацию. Схема NRZI кодирования с использованием DPLL проиллюстрирована на рис. 2.2.7.

Рис. 2.2.7. NRZI-кодирование
Симметричная скрученная пара проводов с волновым сопротивлением 120 Ом обеспечивает пропускную способность 2048 Мбит/с (система кодирования HDB3, длина проводов ~100м), а 100 Ом - 1544 Мбит/с (амплитуда сигналов 3 в, система кодирования B8ZS). Номинальное значение перепада обычно составляет 750 мВ.
Наиболее простая схема передача данных путем представления <0> и <1> с помощью двух уровней напряжения не применяется из-за того, что линия обычно используется для подачи на оконечное (терминальное) оборудование. Проблема может быть решена, если <0> характеризуется 0 вольт (приращение над постоянным уровнем), а <1> попеременно сигналами положительной и отрицательной полярности (AMI - Alternate Mark Inversion). Такая схема создает проблему синхронизации, когда подряд следует большое число нулей. Необходимо, чтобы было достаточное число переходов 0->1 и 1->0 в единицу времени. Существует также схема ADI (Alternate Digit Inversion), где инверсия полярности производится для каждого из передаваемых двоичных разрядов. Но эта схема менее эффективна.
По этой причине система кодирования AMI была модифицирована в HDB3 (High Density Bipolar 3). Цифра 3 указывает на максимально возможное число последовательных нулей в кодовой последовательности. AMI требует, чтобы <1> передавались попеременно сигналами противоположной полярности, так последовательность 11011 должна быть передана как +-0+-. HDB3 заменяет любую группу из 4 нулей последовательностью из 3 нулей, за которой следует нарушение последовательности отображения единиц. Таким образом, последовательность 11000001 будет отображена как +-000-0+ (возможен инверсный вариант, когда символы + заменяются на - и наоборот). Дальнейшего улучшения балансировки сигнала можно достичь, если заменить код, содержащий 4 нуля подряд, последовательностью b00v (b - обычный биполярный сигнал, v - нарушение последовательности). В США используют схему кодировки B8ZS (Bipolar with 8 Zeros Substitution), где 8 нулей кодируются как 00b0vb0v. В 1986 году ansi принял решение о введение схемы кодирования 2B1Q (2 Binary into 1 Quaternary). При этой схеме каждая пара бит преобразуется в четверичные элементы +3 +1 -1 -3. Код синхронизации (SW - Synchronization Word) при этом содержит 9 четверичных элементов, повторяющихся каждые 1.5 мс:
+3 +3 -3 -3 -3 +3 -3 +3 +3 (+3 соответствует +2.5 В)
В Германии используется схема кодировки 4B3T (4 двоичных разряда кодируются в 3 циклических кода).
Двоичная информация передается блоками, обычно зазываемыми кадрами (или пакетами). В рамках системы 2B1Q для передачи 144 кбит/с требуется частота модуляции не менее 72 кбод. На практике для передачи кадров и выполнения функций управления необходимо создать дополнительные виртуальные каналы. Это доводит требуемую частоту модуляции до 80 кбод. Сводные данные по наиболее популярным схемам кодирования приведены в табл. 2.2.1.
Таблица 2.2.1.
| Название метода | Расшифровка | Описание |
| 1B2B | | Один бит исходной последовательности кодируется комбинацией из 2 бит половинной длительности |
| B3ZS B6ZS B8ZS | bipolar with 3/6/8 zero substitution | Биполярный код с заменой 000/000000/00000000 на последовательности 00v/0vb0vb/000vb0vb (или b0v для B3ZS) |
| HDB2 (/3) | High density bipolar code of order 2 (/3) | Биполярный код высокой плотности второго (третьего) порядка. Эквивалентен коду с возвратом к нулю (RZ) и с инверсией для логических 1. Последовательность 000 (соответственно 0000) заменяется на 00v или b0v (соответственно 000v или b00v). Число b сигналов между v-сигналами всегда нечетно. В результате возникает трехуровневый код. |
| CMI | coded mark inversion | Двухуровневый двоичный код (класса 1B2B) без возвращения к нулю. Используется инверсия полярности для каждой логической 1 (единице ставится в соответствие 11 или 00), а для каждого логического нуля вводится смена полярности в середине интервала. |
Кадр содержит 120 пар бит (quats), что соответствует 240 бит, 8 кадров образуют мультифрэйм. Первый кадр мультифрэйма выделяется путем посылки Inverted Synchronization Word (ISW). В конце каждого кадра всегда присутствуют специальные биты, которые служат для целей управления (бит активации, бит холодного старта, биты состояния питания, биты управления синхронизацией и т.д.). Структура кадра выглядит следующим образом:
| |
|
Кадры следуют каждые 1.5мс. Здесь нужно следить за тем, чтобы не было корреляции между сигналами, следующими в противоположных направлениях. Для этого используются скрэмблеры.
В традиционной телефонной сети для соединения с требуемым клиентом используются аппаратные коммутаторы. Если коммутатор имеет n входов и n выходов, то одновременно можно реализовать не более n связей. Реально это число всегда меньше и клиент слышит в трубке “короткие гудки” сигнала “занято”. В случае комбинирования традиционного коммутатора с m-канальными мультиплексорами пакетов по времени можно осуществить до m*n связей одновременно. При этом становится возможным объединить нескольких клиентов так, что они все одновременно могут говорить друг с другом. Схема такого переключателя каналов показана на рис. 2.2.8.
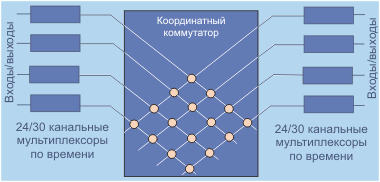
Рис. 2.2.8. Схема переключателя каналов с мультиплексированием по времени.
Кружочки на пересечениях линий представляют собой ключи, замыкая которые можно соединить i-й входной канал с j-м выходным. На каждой линии может быть только один замкнутый ключ. Такая схема коммутации называется TST (Time-Space-Time). Именно она преобладает сегодня при построении сетей ISDN. Магистральные каналы ISDN строятся в соответствии со стандартом T1.
Такая схема при числе входных и выходных каналов равном N=1000 требует миллиона элементарных переключателей. Можно рассмотреть вариант когда используются коммутаторы с n входами и k выходами. Схема коммутатора с N=16, n=4 и k=2 показана на рис. 2.2.9. Число элементаных переключателей в таком коммутаторе М равно:
M = 2kN + k(N/n)2
Первое слагаемое характеризует число элементарных переключателей во входной и выходной секциях системы, а второе - число элементарных переключателей в k внутренних модулях При N=1000, n=50 и k=10 требуется 24000 элементарных переключателей вместо миллиона (но и число одновременно формируемых каналов становится много меньше 1000).
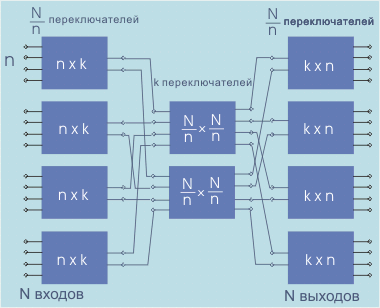
Рис. 2.2.9. Каскадный переключатель-мультиплексор.
Совершенно другим типом коммутатора является переключатель с разделением по времени. Будем считать, что такой коммутатор имеет n входных и столько же выходных каналов. В данном методе входные каналы последовательно сканируются и формируется входной кадр из n доменов. Каждому домену соответствует k бит. Для переключателей на потоки Т1 k = 8, а скорость обработки составляет 8000 кадров в секунду. Центральным узлом такого устройства является коммутатор с разделением по времени, который воспринимает входные кадры и генерирует выходные кадры с измененным порядком временных доменов. Этот коммутатор имеет встроенный буфер для n k-битных слов. На рис. 2.2.10 показана структура такого коммутатора. Во входном кадре временные домены пронумерованы от 0 до 5 (n = 5). Последовательность бит с i-го входного канала с помощью мультиплексора TDM (изображен в левой части рисунка) помещается в i-й временной домен входного кадра. Входной кадр заносится в буфер коммутатора. В коммутаторе формируется таблица перекодировки (lookup-таблица), которая определяет, какому временному домену в выходном потоке будет соответствовать тот или иной домен во входном кадре. В сущности, эта таблица решает, на какой выходной канал попадут данные, пришедшие по заданному входному каналу. Если вы думаете, что ранее не сталкивались с такого рода таблицами, то это заблуждение.
| Первая lookup-таблица, с которой вы познакомились в вашей жизни, была таблицей умножения. Ведь она является таблицей соответствия, и вы реально не производите никаких арифметических действий, пользуясь ей. Когда нужно определить, чему равно 5×5, мы не производим умножение, а извлекаем результат непосредственно из памяти. |

Рис. 2.2.10. Коммутатор с разделением по времени.
С помощью таблицы перекодировки формируется выходной кадр.На рис. 2.22 коммутатор связывает нулевой входной канал с 4-м выход- ным каналом, первый входной канал с 5-м выходным и т.д. Выходной демультиплексор (изображен справа) преобразует номер временного домена выходного кадра в номер выходного канала. Так, временной домен с номером 4 попадет в 4-й выходной канал. В сущности, здесь с помощью пакетной методики осуществляется коммутация каналов.
В процессе работы коммутатор должен запоминать n кодов, соответствующих временным доменам, а затем считывать их снова в пределах одного периода, равного по длительности 125 мкс. Если каждая ячейка памяти имеет время доступа t мкс, то для всей этой процедуры потребуется 2nt мкс (2nt = 125, что означает n = 125/2t). По этой причине с 100-наносекундной памятью можно реализовать коммутатор на 625 каналов. На основе данной схемы можно реализовать многокаскадный коммутатор на много большее число каналов.
При цифровой передаче данных желательно максимально эффективно использовать имеющуюся полосу пропускания. Одним из способов повышения эффективности является сжатие данных (архивация) на входе канала и обратное преобразование со стороны приемника.