2007
январь
- К
 омпания iRobot представила программируемого робота iRobot Create. Create ориентирован на студентов, профессиональных разработчиков и энтузиастов. Новинка построена на базе роботизированного пылесоса Roomba. iRobot Create оснащен набором интерфейсов для подключения дополнительных внешних устройств и имеет широкие возможности программирования. омпания iRobot представила программируемого робота iRobot Create. Create ориентирован на студентов, профессиональных разработчиков и энтузиастов. Новинка построена на базе роботизированного пылесоса Roomba. iRobot Create оснащен набором интерфейсов для подключения дополнительных внешних устройств и имеет широкие возможности программирования.
- Японская компания Tomy продемонстрировала "самого маленького двуногого робота в мире". Рост i-SOBOT составляет всего 165 мм, при этом весит малыш примерно 350 г. i-Sobot оснащен 17 сервоприводами, сенсором для равновесия, балансировки. Робот способен выполнять до 200 различных движений, самостоятельно подниматься на ноги при падениях, знает 180 слов и реагирует на несложные голосовые команды.
- В Японии представлен первый в мире робот-скейтер. Зовут его Plen. Кроме катания на скейте, он умеет кататься на коньках с четырьмя колёсами и носить небольшие предметы. Робот имеет высоту около 23 см. и работает под управлением 32-битного CPU ARM7 на частоте 33 MHz.
- И
 гровую приставку Nintendo Wii подключили к промышленному роботу-манипулятору фирмы Kuka. гровую приставку Nintendo Wii подключили к промышленному роботу-манипулятору фирмы Kuka.
Благодаря этому с роботом можно играть не только в теннис, но и сражаться на мечах.
Технологии, заложенные в Wii, начинают серьезно рассматриваться в качестве одного из возможных интерфейсов управления роботами.
- Биолог Барри Триммер (Barry Trimmer) и инженер Дэвид Каплан (David Kaplan) из американского университета Тафтс (Tufts University) представили уникальный проект "Технологии биомиметики для роботов с мягким телом". Под мягким телом подразумеваются не просто гибкость или мягкость внешней оболочки, а действительно мягкие машины, не содержащие твёрдых элементов. Первый образец робота-гусеницы из силикона с синтетическими мышцами был назван Softbot.
февраль
- В НАСА объявили об успешном завершении процесса удаленного обновления программного обеспечения марсианских роботов Spirit и Opportunity. Наиболее существенным добавлением является способность марсоходов узнавать уже раз виденный пейзаж, несмотря на изменение угла зрения и перспективы. До этого для корреляции полученных изображений марсоходам требовалась помощь с Земли. На момент обновления аппараты НАСА работали на Красной планете уже более трех лет.
- Специалисты из Университета Южной Калифорнии под руководством Вей-Мин Шина (Wei-Min Shen) разработали модульного робота, который может принимать различные формы. Superbot похож на части конструктора Lego, которые можно соединять вместе для получения самых разнообразных фигур. Разработчики смогли создать несколько систем, в том числе в форме колеса, паука, многоножки, змеи, длинных конечностей. Каждый модуль представляет собой законченную роботизированную систему, имеющую источник энергии, контроллеры, сенсоры и средства коммуникации.
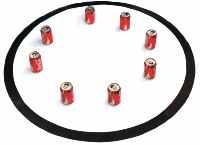
- Разработка самособирающихся роботов swarm-bots осуществлена под руководством профессора Марко Дориго (Marco Dorigo). Множество идентичных, небольших по размеру мини-роботов могут присоединяться друг к другу с помощью специальных зажимов без участия внешнего командного центра. Мини-роботы способны к самоорганизации: каждый робот-модуль (s-bot) взаимодействует с такими же модулями в непосредственной близости от него. Если в каких-то модулях возникают неполадки, это никак не скажется на работе всего сообщества.
- Специалистами Швейцарского федерального института технологий и Университета Лозанны продемонстрированы миниатюрные роботы-коллективисты, способные взаимодействовать друг с другом и обмениваться информацией. В экспериментах использовали два типа объектов - "пища" и "яд". Задачей каждого бота являлся поиск пищи. У каждого бота имелся произвольный набор параметров - "генов", определявших поведение. В процессе исследований ученые отбирали роботов, наиболее эффективно отыскивающих пищу. Их "геномы" затем смешивались, что приводило к постепенной эволюции ботов. В результате были получены колонии ботов-коллективистов, информирующих друг друга об обнаружении пищи или яда при помощи голубых огоньков. Некоторые роботы эволюционировали в индивидуалистов, старающихся ввести своих сородичей в заблуждение и тем самым отвадить их от пропитания.
- В китайском исследовательском центре роботостроения при Шаньдунском научно-техническом университете в мозг голубя был имплантирован электронный микрочип, позволяющий управлять птицей. С помощью радиокоманд ученые стимулировали отделы мозга голубя-киборга, и тот послушно выполнял команды - менял направление полета и приземлялся на заранее выбранное место.
март
- Японские разработчики представили окончательный вариант гуманодного робота HRP-2. Промет (Promete) - так назвал робота аниматор Ютака Изубучи - умеет двигаться со скоростью 2 км в час, в том числе по неровной поверхности, а также самостоятельно подниматься на ноги в случае падения. Руки робота способны удерживать предметы массой до 2 кг. Promete с легкостью может налить и подать чашку с жидкостью, причем не пролив на пол ни капли.
- Американская независимая исследовательская группа Anybots представила робота-гуманоида, который сам учится ходить. Робот Декстер сделал свои первые шаги лишь несколько дней спустя после того, как научился стоять. Его конструкторы утверждают, что их детище может учиться на своих ошибках. Цель проекта - сконструировать робота, который бы смог адаптироваться к различным условиям, подобно людям, а не строго подчиняться определенным программам.
- В Южной Корее разработали специальную этическую хартию, регулирующую отношения между людьми и роботами. Новые нормы будут отражать три правила робототехники Айзека Азимова. Хартия призвана закрепить контроль человека над роботами и предотвратить незаконное использование роботов.
- Два автономных спутника были запущены с мыса Канаверал, Флорида. Спутники построены для программы Orbital Express, чтобы протестировать возможность автономной дозаправки и ремонта спутников на орбите. Аппарат ASTRO предназначен для автономных транспортных операций и снабжен манипулятором для ловли спутников. Второй спутник, NextSat, является прототипом следующего поколения орбитальных сервисных спутников. Эти автономные роботы-спутники должны позволить разведывательным спутникам держаться над областями, представляющими интерес, необходимое для них время.
- Новый израильский боевой робот VIPeR создан для ведения боя в городской местности и войны с терроризмом. Робот имеет уникальные гусеницы-колеса и способен подниматься по лестницам. Специалисты из израильской компании Galileo Mobility Instruments придумали и запатентовали колесо ссылка скрыта. В необходимый момент система рычажков внутри колеса раскрывается в разные стороны. Каждый рычажок оканчивается роликом, который давит изнутри на резиновый обод колеса. Под действием этой силы меняется конфигурация покрышки, которая "превращается" в обычную гусеницу. VIPeR управляется дистанционно и вооружен специально сделанным для него мини-вариантом пистолета-пулемета "Узи" калибром 9 мм, на котором установлен лазерный прицел.
- В Новосибирске открылась вторая всероссийская конференции по нанотехнологиям - НАНО 2007. В работе форума приняли участие ведущие ученые России и Беларуси. На конференции было представлено более 400 докладов. В России полным ходом идет раскрутка идеи нанотехнологического прорыва и воспитания нового поколения инженеров. Некоторые аналитики полагают, что это очередной проект по отмыванию денег из государственной казны.
- Самая маленькая в мире рука для робота, поперечник кисти которой (когда она сжата в кулак) насчитывает один миллиметр, создана профессором Чан-Цзинь Ким (Chang-Jin Kim) и его лабораторией микромеханических систем университета Калифорнии в Лос-Анджелесе (UCLA Micromanufacturing Laboratory). Микроскопический манипулятор Microhand оснащён четырьмя очень гибкими пальцами, каждый из которых сделан из шести кремниевых пластин с воздушными полимерными камерами, играющими роль мускулов.
- М
 арек Михайловски (Marek Michalowski) из Университета Карнеги Меллона совместно с Хидеки Козимой (Hideki Kozima) из японского Национального института коммуникационных технологий разработали небольшого, похожего на цыпленка робота, который способен чувствовать ритм и танцевать в такт музыке. Робот, названный Keepon, совершает очень находчивые танцевальные движения. Этот небольшой желтый робот является частью большого проекта по созданию роботов, которые могут синхронизировать свое поведение с человеческим партнером. Например, синхронизация темпа голоса и жестов докладчика со слушателем считаются залогом для гладких и комфортабельных взаимодействий. арек Михайловски (Marek Michalowski) из Университета Карнеги Меллона совместно с Хидеки Козимой (Hideki Kozima) из японского Национального института коммуникационных технологий разработали небольшого, похожего на цыпленка робота, который способен чувствовать ритм и танцевать в такт музыке. Робот, названный Keepon, совершает очень находчивые танцевальные движения. Этот небольшой желтый робот является частью большого проекта по созданию роботов, которые могут синхронизировать свое поведение с человеческим партнером. Например, синхронизация темпа голоса и жестов докладчика со слушателем считаются залогом для гладких и комфортабельных взаимодействий.
- Представлена новейшая разработка российского ВПК - беспилотный авиационный комплекс "Типчак". Летающий робот-разведчик способен несколько часов барражировать над землей и в режиме реального времени передавать видеоинформацию в любую погоду, в том числе и ночью. Российские конструкторы также сообщили о новой секретной разработке - ударном комплексе Ту-300.
апрель
- С
 пециалисты Массачусетского технологического института (MIT) разработали робота Domo, способного взять у хозяина тарелки и положить их на полку. Аарон Эдсингер (Aaron Edsinger), занимающийся разработкой робота, сообщил, что Domo является следующим поколением роботов, спроектированных в MIT, предшественниками которых были Kismet и Cog. Мозг Domo - 12 компьютеров, которые анализируют окружающий мир и решают, на чём сосредоточить своё внимание. пециалисты Массачусетского технологического института (MIT) разработали робота Domo, способного взять у хозяина тарелки и положить их на полку. Аарон Эдсингер (Aaron Edsinger), занимающийся разработкой робота, сообщил, что Domo является следующим поколением роботов, спроектированных в MIT, предшественниками которых были Kismet и Cog. Мозг Domo - 12 компьютеров, которые анализируют окружающий мир и решают, на чём сосредоточить своё внимание.
- Первые в России соревнования Национальной Лиги Международного Молодежного Чемпионата роботов Eurobot прошли в Большом зале Дома культуры МГТУ имени Н.Э. Баумана.
- В университете Мэйдзи создали робота Kansei, который выражает эмоции в зависимости от того, какие слова ему предлагают "прочитать". При слове "Буш" машина демонстрирует страх и ненависть, а "лимон" вызывает у нее радость. При этом робот реагирует на смысл текста. В его программу заложены 50 тыс. английских слов и их возможные логические связки. Все прилагательные разделены на шесть эмоциональных групп. При вводе слова автоматически выстраиваются логические цепочки и его связь с теми или иными прилагательными. В зависимости от этого выбирается эмоция. Логические цепочки для одного и того же слова каждый раз получаются с вариациями, и эмоции также меняются.
- Учёные из университета Джона Хопкинса (Johns Hopkins University) сообщили, что создали первый в мире "полностью интегрированный протез руки, которым можно управлять естественным образом и получать сенсорную обратную связь". Протез использует для связи с человеком прямое соединение с нервной системой, обеспечивающее интуитивное использование руки и передачу человеку ощущения захвата предмета.
- Мозг мыши удалось смоделировать группе американским ученых, в которую входили сотрудники IBM Almaden Research Lab и исследователи из университета Невады (University of Nevada). Компьютерная модель содержала 8000 рейронов, каждый из которых имел 6300 синапсов. Суперкомпьютер IBM BlueGene/L, на котором была успешно смоделирована эта сложнейшая система, состоял из 4096 процессоров, каждый из которых использовал 256 Мб памяти.
май
- Исследователи из Университета Пардью (Purdue University) разрабатывают новый алгоритм, который поможет роботам лучше ориентироваться в пространстве и предполагать особенности неизвестной местности, основываясь на предыдущем опыте. Алгоритм строится на базе так называемых "пограничных областей", следующих сразу за территорией, известной роботу. Если робот ориентируется в комнате и натыкается на стену, то он, основываясь на предположении, что стена может иметь завершение, попытается обойти ее. Каждое такое предположение робота получает степень значимости. В том случае, если оно оказалось верным, его вес повышается. В итоге робот получит базу данных предположений, основываясь на которых можно будет относительно точно ориентироваться в сложных условиях.
- Глубоководный робот DEPTHX, созданный американской компанией Stone Aerospace в сотрудничестве с рядом университетов США, спустился на дно озера Закатон (El Zacaton) в центральной Мексике (самого глубокого на Земле естественного колодца), составив полную трёхмерную карту отвесных стен этого провала. Важность рекордного погружения DEPTHX заключается в проверке робота, обладающего системой искусственного интеллекта, помогающей ему передвигаться под водой, составлять карту местности, брать образцы пород, выбирать маршрут движения и возвращаться наверх. DEPTHX является прототипом машин, которые смогут исследовать подлёдные океаны спутников Юпитера.
- Гай Хоффман (Guy Hoffman) и его коллеги из исследовательской группы «Робототехническая жизнь» медиалаборатории Массачусетского технологического института (MIT's MediaLab "Robotic Life") создали настольную лампу-робота AUR. AUR имеет встроенную систему отслеживания движений и аккуратно направляет свет в нужное место. Он может «озираться» и реагировать на различные действия своего хозяина. Лампа, названная "светящимся помощником", была создана для исследования отношений между работами и людьми.
июнь
- На Петербургском экономическом форуме был представлен отечественный андроидный робот AR-100 «Добрыня». Робот является измененным аналогом популярных роботов Robonova-1 и Kondo KHR-2.
- Германская компания KUKA Roboter представила самого большого и сильного робота в мире - серийный промышленный манипулятор KUKA KR 1000 "Titan". Робот-манипулятор может поднимать на вытянутой "руке" одну тонну и в одиночку перемещать и поворачивать автомобильный кузов.
- 15-17 июня в Сан-Франциско прошли IV Международные Олимпийские игры роботов ROBOGAMES 2007. В соревнованиях участвовали свыше 800 роботов из 30 стран мира. RoboGames включали 61 вид соревнований. Игры роботов в Сан-Франциско зафиксированы в Книге рекордов Гиннеса как "самые большие в мире соревнования роботов".
- В
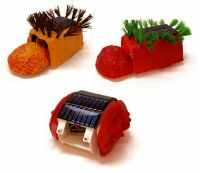 Португалии создан зоопарк для роботизированных существ. Автор проекта Robotarium X - художник Леонел Моура (Leonel Moura) - ранее уже прославился рядом работ на стыке робототехники и искусства. В новом зоопарке для роботов будут уживаться автономные механизмы различных "видов": многоножки, роботы на колесах и ползающие роботы. Португалии создан зоопарк для роботизированных существ. Автор проекта Robotarium X - художник Леонел Моура (Leonel Moura) - ранее уже прославился рядом работ на стыке робототехники и искусства. В новом зоопарке для роботов будут уживаться автономные механизмы различных "видов": многоножки, роботы на колесах и ползающие роботы.
- Робот-милиционер, разработкой которого занимался МГТУ имени Баумана, стал самым широко освещаемым в рунете робототехническим устройством. Скорость передвижения робота - 5-10 километров в час, время работы без подзарядки - 8 часов. Функционально робот предназначен в первую очередь для предупреждения граждан. Если человек совершает или пытается совершить преступление, робот выдает ему всю правовую информацию и говорит, что материалы съемки могут быть использованы в суде. Испытания робота проходили в г. Пермь.
июль
- Ф
 лорентин Вергеттер из Геттингенского университета и группа специалистов сделали робота Runbot, который ходит почти так же быстро, как человек. Робот воспроизводит механизм ходьбы человека и животных, как его описал в 1930-е годы физиолог Николай Бернштейн из России. Бернштейн указывал, что головной мозг включается в процесс регулирования ходьбы, только когда заданные параметры, такие как рельеф или наклон поверхности, меняются. Остальное время движением управляют локальные нервные цепочки. Ранее созданные шагающие роботы ходят только за счет того, что просчитывают каждый угол и каждую миллисекунду движения. "Runbot от них отличается, - говорит Вергеттер. - Технически можно ходить, как эти роботы, но очень неуклюже. Люди так не ходят. Половину цикла ходьбы мы ничего не делаем, просто заваливаемся вперед. Так мы продвигаем себя снова и снова, как пружина". лорентин Вергеттер из Геттингенского университета и группа специалистов сделали робота Runbot, который ходит почти так же быстро, как человек. Робот воспроизводит механизм ходьбы человека и животных, как его описал в 1930-е годы физиолог Николай Бернштейн из России. Бернштейн указывал, что головной мозг включается в процесс регулирования ходьбы, только когда заданные параметры, такие как рельеф или наклон поверхности, меняются. Остальное время движением управляют локальные нервные цепочки. Ранее созданные шагающие роботы ходят только за счет того, что просчитывают каждый угол и каждую миллисекунду движения. "Runbot от них отличается, - говорит Вергеттер. - Технически можно ходить, как эти роботы, но очень неуклюже. Люди так не ходят. Половину цикла ходьбы мы ничего не делаем, просто заваливаемся вперед. Так мы продвигаем себя снова и снова, как пружина".
- Врачи США начали использовать роботов с возможностью видеоконференции для обхода своих больных, находясь в нескольких километрах от госпиталя. Майкл Чан, исполнительный директор компании InTouch Technologies, считает, что их новинка позволяет врачам присутствовать сразу в нескольких местах, что повышает эффективность работы.
- В лабораториях Гарвардского Университета создан летающий робот размером с муху. Вес робота составляет 60 миллиграмм, размах его крыльев - 3 см. Траектория движения крыла напоминает траекторию движения настоящей мухи. Робот предназначен для ведения разведки и проведения экологических исследований. Пока гарвардская муха может летать, пользуясь только внешним источником энергии.
- В Технологическом центре робототехники будущего (Future Robotics Technology Center - fuRo) японcкого Технологического института города Чиба (Chiba Institute of Technology) создан восьминогий робот Halluc II. У Halluc II восемь ног, причём каждая из них заканчивается колесом, что позволяет перемещаться по разнообразным, даже очень неровным поверхностям и преодолевать препятствия. Если колесо наезжает на небольшую неровность, то нога, на которой оно находится, приподнимается, повторяя колёсиком контур поверхности. В другом режиме Halluc II выворачивает свои ноги так, что на землю он опирается их обратной стороной, а не колёсами. Соответственно, катиться он не может, а вместо этого ходит, переступая конечностями.
август
- ВМФ России принял на вооружение новейшие отечественные и зарубежные телеуправляемые подводные роботы "Пантера плюс", "Тайгер", "Фальков", "Обзор-150", "Веном". Они предназначены для поиска и обследования объектов, находящихся на грунте, и подводно-технических работ. Прошел государственные испытания мобильный поисковый комплекс "Кальмар", предназначенный для определения координат обнаруженных подводных целей. Этот глубоководный робот отлично показал себя во время поиска "черных ящиков" армянского самолета А-320, потерпевшего катастрофу в районе аэропорта Адлер.
- Маттиас Якобссон (Mattias Jacobsson) из лаборатории будущих приложений института Виктории (Viktoria Institute) в Гётеборге (Швеция) построил группу необычных роботов GlowBots, способных общаться друг с другом и своим владельцем благодаря смене картинок, составленных из огоньков на их круглых спинах. Когда два робота встречаются, они обмениваются информацией о своих огоньках и вместе создают более сложный образец. В результате со временем рисунки начинают отражать социальное взаимодействие машинок. Если коснуться робота или просто положить руку на стол неподалёку, то GlowBot в состоянии различить все эти взаимодействия и неким образом отразить свои "переживания" в рисунке на спине. Ещё интереснее, что GlowBot делится со своими сородичами тем, что пережил. Это изменяет образцы рисунков на спинках соседей и далее, по цепочке, затрагивает огоньки на следующих роботах.
- Американские войска ввели в Ирак роботов системы Talon Sword, которые оснащены автоматическим оружием. Это первый случай использования в боевых действиях машин, снабженных системой дистанционного управления. Новые роботы вооружены пулеметом М240 и предназначены для проведения рейдов на вражеской территории. Управление ими осуществляется с помощью специального лэптопа с джойстиком и кнопкой для самоликвидации робота в крайнем случае.
- Н
 акануне выхода на рынок робота-динозаврика Pleo, которого разработчики считают новой формой жизни, Ugobe представила собственные Три закона для роботов: форма жизни (робот) должна чувствовать и выражать эмоции; форма жизни (робот) должна сознавать себя и окружающую обстановку; форма жизни (робот) должна обучаться, развиваться и эволюционизировать. акануне выхода на рынок робота-динозаврика Pleo, которого разработчики считают новой формой жизни, Ugobe представила собственные Три закона для роботов: форма жизни (робот) должна чувствовать и выражать эмоции; форма жизни (робот) должна сознавать себя и окружающую обстановку; форма жизни (робот) должна обучаться, развиваться и эволюционизировать.
- Российский подводный робот "Клавесин" проверен во льдах Арктики, на глубине более полутора тысяч метров. "Клавесин" вооружен самой современной электроникой отечественного производства. Управлялся робот с судна сопровождения - атомного ледокола «Россия», команды отдавались через гидроакустический канал связи. Дальность использования робота - до 15 километров, но он может уходить и дальше, работать автономно от аппаратуры наблюдения, после чего возвращаться в заданную оператором точку.
сентябрь
- Инженер Дэннис Хун (Dennis Hong) и его коллеги из политехнического института Вирджинии создали трeхногого робота STriDER. Машина максимально полно использует гравитацию для совершения каждого шага, затрачивая на него минимум э
 лектричества, и требует для управления своим движением минимум «мозгов». Когда STriDER пытается сделать шаг, одна из его ног резко подгибается, а круглый корпус под действием силы тяжести опрокидывается вниз и переворачивается на 180 градусов, проскальзывая по инерции между стоящей на земле парой ног. Таким образом, машина оказывается вновь на трех конечностях. Хотя внешне этот робот не похож ни на одно живое существо, "походка STriDER", по словам создателя машины, "ближе к походке человека, чем ходьба большинства двуногих гуманоидных роботов, которые существуют сегодня". лектричества, и требует для управления своим движением минимум «мозгов». Когда STriDER пытается сделать шаг, одна из его ног резко подгибается, а круглый корпус под действием силы тяжести опрокидывается вниз и переворачивается на 180 градусов, проскальзывая по инерции между стоящей на земле парой ног. Таким образом, машина оказывается вновь на трех конечностях. Хотя внешне этот робот не похож ни на одно живое существо, "походка STriDER", по словам создателя машины, "ближе к походке человека, чем ходьба большинства двуногих гуманоидных роботов, которые существуют сегодня".
- Компания Boston Dynamics создала уникального четвероногого робота Little Dog, способного успешно преодолевать сложный маршрут по пересеченной местности, самостоятельно выбирая оптимальную траекторию.
- К
 омпания Omron представила новую технологию - "Программное обеспечение, измеряющее улыбку". 3D технология гарантирует точное измерение улыбки по шкале от 0% до 100%, даже если человек не смотрит непосредственно в камеру. омпания Omron представила новую технологию - "Программное обеспечение, измеряющее улыбку". 3D технология гарантирует точное измерение улыбки по шкале от 0% до 100%, даже если человек не смотрит непосредственно в камеру.
октябрь
- В Екатеринбурге успешно завершилась первая в России операция, выполненная при помощи робота-хирурга Да Винчи. Этот момент врачи первой областной клинической больницы назвали историческим. Робот способен выполнять так называемые операции «замочной скважины» - без больших разрезов, через миниатюрные проколы в теле пациента.
- Робот-нянька NANC-E Nannybot способен полностью взять на себя заботу о новорожденном. Конечно, чтобы рискнуть и доверить своего малыша няне-роботу, нужно обладать определенным мужеством.
- В рамках выставки-конгресса "Мехатроника и робототехника" (МиР-2007), проходившей в Санкт-Петербурге, состоялись международные соревнования «Евробот» ("Eurobot") с участием молодежных команд из России, Бельгии, Венгрии, Румынии, Франции и Чехии. Российский этап соревнований получил название «Северная звезда».
- Американский исследователь ДНК Крейг Вентер (Craig Venter), содействовавший декодированию человеческого генома, заявил о том, что ему удалось синтезировать в лаборатории искусственную комплексную хромосому, которая может стать основой для создания первой искусственной формы жизни на Земле. На основе соединений, изготовленных в лабораторных условиях, Крейг Вентер и его коллеги получили хромосому, содержащую 580 тыс. базовых пар генетического кода. Последовательность ДНК базируется на бактерии Mycoplasma genitalium, которую группа урезала вплоть до чистых основ необходимых для поддержания жизни.
- I
 II Российская олимпиада роботов прошла 17 октября в рамках выставки "Робототехника 2007". Олимпиада была организована интернет-порталом РобоКлуб и компанией Техновижн при поддержке Русской выставочной компании "Эксподизайн" - организатора V Международной специализированной выставки "Робототехника". Участники Олимпиады состязались в 4-х видах спортивных соревнований. Наибольшее количество участников собрали соревнования "Кегельринг". II Российская олимпиада роботов прошла 17 октября в рамках выставки "Робототехника 2007". Олимпиада была организована интернет-порталом РобоКлуб и компанией Техновижн при поддержке Русской выставочной компании "Эксподизайн" - организатора V Международной специализированной выставки "Робототехника". Участники Олимпиады состязались в 4-х видах спортивных соревнований. Наибольшее количество участников собрали соревнования "Кегельринг".
- На международной выставке "Милипол" представлены российские роботы "Скорпион", "Каракурт", "Гюрза" и "Варан" Ковровского электромеханического завода. Отечественные разработки продемонстрировали, что Россия реально способна противопоставить Западу технические средства собственного производства. Робот "Варан" сегодня стоит на вооружении всех российских антитеррористических центров ФСБ. Он может выполнять не только задачи обнаружения и обезвреживания взрывчатого вещества, но вести разведку и выполнять ударные функции. При необходимости его оборудуют пулеметами и автоматическими гранатометами.
- Специалисты из корейского университета Хоннам разработали робота для использования в медицине. Модель настолько мала, что она может легко путешествовать по сосудам. Диаметр микроробота составляет 1 мм при длине 10 мм. Модель автономна: она получает энергию из сахара, присутствующего в крови пациента.
- В японском Национальном институте информационных и коммуникационных технологий (NICT) разработан человекоподобный робот Sarcos, понимающий и использующий человеческий язык жестов. Робот оснащен интеллектуальной системой анализа языка тела и жестов. Например, он понимает значение жеста, когда люди указывают на что-либо пальцем.
ноябрь
- В Калифорнии завершилась гонка автомобилей-роботов DARPA Urban Challenge, стартовавшая 26 октября. В гонке участвовали 35 роботов, которые должны были продемонстрировать способность вождения по улицам, загруженным транспортом. Машины-роботы должны были соблюдать все дорожные правила. Победителем стал беспилотный внедорожник Boss, созданный в университете Карнеги-Меллона совместно с компанией General Motors. Приз победителя составил $2 млн. Второе место занял автомобиль TBA, разработанный командой Стенфордского университета при поддержке компании Intel. Приз за второе место - $1 млн. Третье место и $500000 получил автомобиль Odin, разработанный в Технологическом университете штата Вирджиния (Blacksburg, VA).
- Группа европейских ученых из University Libre de Bruxelles (Belgium) под руководством Хосе Холлоя (Jose Halloy) объявила о серии экспериментов с использованием миниатюрных роботов, запрограммированных на симуляцию поведения тараканов. Чтобы насекомые принимали роботов за «своих», они покрывались специальным ферментом. Насекомые вопреки инстинктам в 60% случаев следовали за своими механическими "собратьями".
- Компания Hitachi продемонстрировала робота EMIEW 2, который имеет инновационную особенность в конструкции своих конечностей. Он может передвигаться на двух оснащенных колесами ногах и при необходимости вставать на колени, а также перешагивать небольшие препятствия. Специалисты компании сообщили, что законченную модель EMIEW2 можно будет использовать не только дома, но и в офисе, например, для переноски документов, встречи гостей, уборки в помещении и ряда других не слишком сложных задач.
- Европейские ученые ведут работу над проектом I-SWARM, в ходе которого планируется создание организованного "коллектива" микро-роботов. Проект координируется Йоргом Сейфридом (Jorg Seyfried) из университета Карлсруе (University of Karlsruhe) в Германии. Габаритные размеры каждого робота 2 x 2 x 1 мм, при этом планируется, что одновременно поставленную задачу будут решать сразу тысяча подобных аппаратов. Коллективное взаимодействие должно обеспечить не только возможность решения очень широкого круга задач, но и высочайшую "живучесть" всего "коллектива", когда потеря одного мини-робота не сказывается на работоспособности всей системы.
- Представлен первый в мире андроид, имитирующий боль и реагирующий на нее. Данная технология является первым шагом на пути создания "живых" искусственных конечностей, которые наделены физическими ощущениями. Андроид получил имя Aiko и является созданием Ли Трунга (Le Trung), который разработал программное обеспечение, управляющее Aiko, ее способностями к чтению и математике, а также отвечающее за ее зрение, цветовое восприятие и слух.
- В Токио продемонстрирован робот Twendy-One. У робота достаточно силы, чтобы поддержать человека, а гибкие руки позволяют ему взять со стола ломтик хлеба и сделать тост. В результате регулировки силы захвата Twendy-One способен удерживать бумажные стаканы и соломинки, не сминая их. Руки робота обладают четырьмя пальцами для захвата предметов. Внутренняя часть рук изготовлена из мягкого пластика и оснащена 240 сенсорами, которые способны определять твердость объектов. Эти сенсоры предоставляют роботу возможность регулировать силу захвата рук для того, чтобы удерживать предметы.
- Компания Boeing объявила об успешном проведении испытаний автономного подводного аппарата, выстреливаемого из торпедного аппарата и способного по завершении задания самостоятельно вернуться в него.
декабрь
- Калифорнийская компания Ugobe объявила о выпуске робота-динозавра Pleo. Разработка игрушки заняла 21 месяц. Динозавр управляется системой Ugobe Life OS. Мозгом Pleo служат два 32-битных процессора. Ugobe считает Pleo новой формой жизни.
- Корейский государственный институт науки и технологий (KAIST) представил мобильного робота Securo, способного ориентироваться в городских условиях без помощи оператора. Робот оснащен встроенной системой глобального позиционирования (GPS), лазерным сканером, компасом и системами контроля движений. До сих пор городская среда была практически недоступна для роботов в силу ее извилистости, массы посторонних объектов, пешеходов и машин. Новый робот способен даже в случае потери спутникового сигнала GPS полагаться на собственные алгоритмы действия, память и камеры, необходимые для оценки текущей ситуации.
- Хироши Ишигуро (Hiroshi Ishiguro) из Осакского университета представил новую версию своего знаменитого андроида Repliee. Робот получил имя Repliee Q1Expo. Repliee Q1Expo выглядит, как настоящая женщина. Он может дышать, морщиться и двигаться как человек. Сами движения андроида по пластике практически неотличимы от человеческих.
- П
 обедителем конкурса «Японский робот года» стал робот M-430iA производства Fanuc, способный благодаря особым пластиковым манипуляторам захватывать с конвейера до 120 объектов в минуту. Лауреатом в номинации "Лучший робот" стал больничный робокурьер компании Matsushita. Лауреатом конкурса в номинации Small- To Medium-Sized Venture Award стал робот Miuro от ZMP, который проигрывает музыку, перемещаясь за хозяином. обедителем конкурса «Японский робот года» стал робот M-430iA производства Fanuc, способный благодаря особым пластиковым манипуляторам захватывать с конвейера до 120 объектов в минуту. Лауреатом в номинации "Лучший робот" стал больничный робокурьер компании Matsushita. Лауреатом конкурса в номинации Small- To Medium-Sized Venture Award стал робот Miuro от ZMP, который проигрывает музыку, перемещаясь за хозяином.
- Сильвен Калинон (Sylvain Calinon) и его коллеги в Швейцарском федеральном технологическом институте в Лозанне разработали программное обеспечение, которое позволяет им обучать человекподобного робота новым заданиям просто вручную, перемещая его конечности в рамках необходимых движений. Ребенка обучают схожим образом, например, когда показывают, как держать ложку. Калинон надеется, что разработанное программное обеспечение позволит пользователям самостоятельно обучать домашних роботов новым обязанностям.
- Британские специалисты из лондонского Имперского колледжа создали хирурга-робота i-Snake, благодаря которому врачи смогут осуществлять сложнейшие процедуры. Прибор, созданный учеными, представляет собой длинную трубку, в которую помещены датчики, микромоторы и инструменты для видеонаблюдения. Лорд Ара Дарзи, заместитель министра здравоохранения Великобритании и известный хирург, пояснил, что доступность и чувствительность i-Snake позволят достичь несравненных высот в диагностике и терапевтических процедурах.
- Продемонстрирован российский зенитный ракетный комплекс ТОР-М2. По оценкам военных, установка ТОР-М2 является фактически "боевым роботом", способным принимать решения при ведении боевых действий. В отличие от зарубежных образцов, ТОР-М2 способен эффективно вести борьбу с высокоточным оружием, в частности крылатыми и противорадиолокационными ракетами.
|
|

Tomy продемонстрировала "самого маленького двуногого робота в мире". Рост i-SOBOT составляет всего 165 мм. ссылка скрыта
|
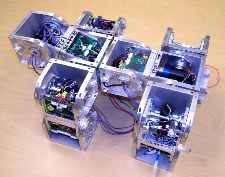
Модульный робот Superbot может принимать различные формы. Разработчики смогли создать несколько систем, в том числе в форме колеса, паука, многоножки, змеи, длинных конечностей. ссылка скрыта

|

Множество мини-роботов могут присоединяться друг к другу с помощью специальных зажимов без участия внешнего командного центра. Мини-роботы способны к самоорганизации. ссылка скрыта
|

:: Роботы-коллективисты ::
|
Миниатюрные роботы-коллективисты способны взаимодействовать друг с другом и обмениваться информацией. У каждого бота имеется произвольный набор параметров - "генов", определяющих поведение. В процессе исследований отбирали ботов, наиболее эффективно отыскивающих пищу. Их "геномы" затем смешивались, что приводило к постепенной эволюции. ссылка скрыта
|

HRP-2 Promete умеет двигаться со скоростью 2 км в час, в том числе по неровной поверхности, а также самостоятельно подниматься на ноги в случае падения. Promete может налить и подать чашку с жидкостью, причем не пролив ни капли. ссылка скрыта
|

Робот-гуманоид Декстер сам учится ходить. Его конструкторы утверждают, что их детище может учиться на своих ошибках. ссылка скрыта
|

Израильский боевой робот VIPeR создан для ведения боя в городской местности. Робот имеет уникальные гусеницы-колеса и способен подниматься по лестницам. ссылка скрыта
|

Самая маленькая в мире рука для робота, поперечник кисти которой (когда она сжата в кулак) насчитывает один миллиметр, создана в лаборатории микромеханических систем университета Калифорнии. ссылка скрыта
|

Новейшая разработка российского ВПК - беспилотный авиационный комплекс "Типчак". Летающий робот-разведчик способен в режиме реального времени передавать видеоинформацию в любую погоду, в том числе и ночью. ссылка скрыта
|

Робот Kansei выражает эмоции в зависимости от того, какие слова ему предлагают "прочитать". При этом робот реагирует на смысл текста. В его программу заложены 50 тыс. слов и их возможные логические связки. ссылка скрыта
|

:: Алгоритм ориентирования ::
|
Новый алгоритм поможет роботам лучше ориентироваться в пространстве и предполагать особенности неизвестной местности, основываясь на предыдущем опыте. Если робот ориентируется в комнате и натыкается на стену, то он, основываясь на предположении, что стена может иметь завершение, попытается обойти ее. Каждое такое предположение робота получает степень значимости. В том случае, если оно оказалось верным, его вес повышается. ссылка скрыта
|

Глубоководный робот DEPTHX спустился на дно озера Закатон в центральной Мексике, составив полную трёхмерную карту отвесных стен провала. Важность рекордного погружения DEPTHX заключается в проверке робота, обладающего системой искусственного интеллекта, помогающей ему передвигаться под водой, составлять карту местности, брать образцы пород, выбирать маршрут движения и возвращаться наверх. DEPTHX является прототипом машин, которые смогут исследовать подлёдные океаны спутников Юпитера. ссылка скрыта
|

В медиалаборатории MIT создали настольную лампу-робот. AUR имеет встроенную систему отслеживания движений и аккуратно направляет свет в нужное место. Он может «озираться» и реагировать на различные действия своего хозяина. ссылка скрыта
|

На Петербургском экономическом форуме был представлен отечественный андроидный робот AR-100 «Добрыня». ссылка скрыта
|

Германская компания KUKA представила самого большого и сильного робота в мире - промышленный манипулятор KUKA KR 1000 "Titan". ссылка скрыта
|

Робот-милиционер стал самым широко освещаемым в рунете робототехническим устройством. Функционально робот предназначен в первую очередь для предупреждения граждан. ссылка скрыта
|
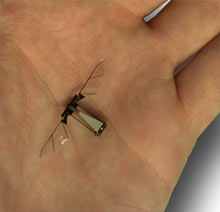
В Гарвардском университете создан летающий робот размером с муху. Вес робота составляет 60 миллиграмм, размах его крыльев - 3 см. Пока гарвардская муха может летать, пользуясь только внешним источником энергии. ссылка скрыта
|

У Halluc II восемь ног, причём каждая из них заканчивается колесом, что позволяет перемещаться по разнообразным, даже очень неровным поверхностям и преодолевать препятствия. Если колесо наезжает на небольшую неровность, то нога, на которой оно находится, приподнимается, повторяя колёсиком контур поверхности. В другом режиме Halluc II выворачивает свои ноги так, что на землю он опирается их обратной стороной, а не колёсами. ссылка скрыта
|

GlowBots способны общаться друг с другом и своим владельцем благодаря смене картинок из огоньков на их спинах. Когда два робота встречаются, они обмениваются информацией о своих огоньках и вместе создают более сложный образец. В результате со временем рисунки начинают отражать социальное взаимодействие машинок. ссылка скрыта
|

Трeхногий робот STriDER максимально полно использует гравитацию для совершения каждого шага, затрачивая на него минимум электричества, и требует для управления своим движением минимум «мозгов». Когда STriDER пытается сделать шаг, одна из его ног резко подгибается, а круглый корпус под действием силы тяжести опрокидывается вниз и переворачивается на 180 градусов, проскальзывая по инерции между стоящей на земле парой ног. Таким образом, машина оказывается вновь на трех конечностях. ссылка скрыта
|

Компания Boston Dynamics создала уникального четвероногого робота Little Dog, способного успешно преодолевать сложный маршрут по пересеченной местности, самостоятельно выбирая оптимальную траекторию. ссылка скрыта
|

:: Евробот - Северная звезда ::
|
В рамках выставки-конгресса МиР-2007 (Санкт-Петербург), состоялись международные соревнования «Евробот» ("Eurobot") с участием молодежных команд из России, Бельгии, Венгрии, Румынии, Франции и Чехии. Российский этап соревнований получил название «Северная звезда». ссылка скрыта
|

В NICT разработан человекоподобный робот Sarcos, понимающий и использующий человеческий язык жестов. Робот оснащен интеллектуальной системой анализа языка тела и жестов. Например, он понимает значение жеста, когда люди указывают на что-либо пальцем. ссылка скрыта
|

:: DARPA Urban Challenge ::
|
В гонке DARPA Urban Challenge участвовали 35 роботов. Машины-роботы должны были соблюдать все дорожные правила. Победителем стал беспилотный внедорожник Boss, созданный в университете Карнеги-Меллона совместно с компанией General Motors. Приз победителя составил $2 млн. ссылка скрыта
|

Компания Hitachi продемонстрировала робота EMIEW 2, который имеет инновационную особенность в конструкции своих конечностей. Он может передвигаться на двух оснащенных колесами ногах и при необходимости вставать на колени, а также перешагивать небольшие препятствия. ссылка скрыта
|

Ли Трунгом (Le Trung) представлен первый в мире андроид, имитирующий боль и реагирующий на нее. Данная технология является первым шагом на пути создания "живых" искусственных конечностей, которые наделены физическими ощущениями. ссылка скрыта
|

В Токио продемонстрирован робот Twendy-One. У робота достаточно силы, чтобы поддержать человека, а гибкие руки позволяют ему взять со стола ломтик хлеба и сделать тост. В результате регулировки силы захвата Twendy-One способен удерживать бумажные стаканы и соломинки, не сминая их. Внутренняя часть рук изготовлена из мягкого пластика и оснащена 240 сенсорами, которые способны определять твердость объектов. ссылка скрыта
|

В Корее представлен мобильный робот Securo, способный ориентироваться в городских условиях без помощи оператора. Робот оснащен встроенной системой глобального позиционирования (GPS), лазерным сканером, компасом и системами контроля движений. До сих пор городская среда была практически недоступна для роботов в силу ее извилистости, массы посторонних объектов, пешеходов и машин. ссылка скрыта
|

Хироши Ишигуро представил новую версию своего знаменитого андроида Repliee. Repliee Q1Expo выглядит, как настоящая женщина. Движения андроида по пластике практически неотличимы от человеческих. ссылка скрыта
|

Лауреатом конкурса «Японский робот года» в номинации Small- To Medium-Sized Venture Award стал робот Miuro от ZMP, который проигрывает музыку, перемещаясь за хозяином. ссылка скрыта
|
|
|
