
Программно-аппратный комплекс для отладки микропроцессорных систем управления электровозами постоянного тока
| Вид материала | Документы |
- Программно-аппаратные средства функциональной эмуляции микропроцессорных систем управления, 28.14kb.
- Распределительные устройства и подстанции глава 1 распределительные устройства напряжением, 1787.75kb.
- Распределительные устройства и подстанции глава 1 распределительные устройства напряжением, 1894.23kb.
- Преобразователь измерительный активной мощности трехфазного тока эп8508, 237.92kb.
- «усилители постоянного тока», 320.47kb.
- Рефераты публикуемых статей, 77.36kb.
- Методическое пособие к лабораторной работе. Определение горизонтальной составляющей, 93.64kb.
- Терминология Глухозаземленная нейтраль, 249.33kb.
- Лабораторная работа n 4 «Исследование тахогенератора постоянного тока», 54.85kb.
- Терминология + все о двигателе постоянного тока независимого возбуждения, 181.73kb.
ПРОГРАММНО-АППРАТНЫЙ КОМПЛЕКС ДЛЯ ОТЛАДКИ
МИКРОПРОЦЕССОРНЫХ СИСТЕМ УПРАВЛЕНИЯ
ЭЛЕКТРОВОЗАМИ ПОСТОЯННОГО ТОКА
А. Н. Савоськин, И. В. Корзина
Московский государственный университет путей сообщения (МИИТ), г. Москва, ул. Образцова, д. 15., (095) 684-24-41, elmechtrans@mail.ru
Введение
В настоящее время ведутся работы по модернизации электровозов серии ЧС2, отработавших свой ресурс, с модернизацией силовой схемы и заменой всего электрооборудования на отечественное. Для отработки алгоритмов и программ работы микропроцессорных систем управления (МПСУ) новых электровозов ЧС2К создан программно-аппаратный комплекс, включающий в себя математическую модель электровоза, разработанную в программном пакете LabVIEW 7.1.
Благодаря отладке МПСУ на модели сводится к минимуму возможных неисправностей, возникающих по вине МПСУ при эксплуатации её на электровозе.
Результаты работы.
На рис. 1 показана структура программно-аппаратного комплекса. Математическая модель объекта стыкуется с реальной МПСУ (рис. 1). Входными сигналами для модели должны являться сигналы управления вентилями преобразователей и электрическими аппаратами 1, получаемые от МПСУ, а выходными соответственно сигналы о состоянии электрических аппаратов (включено/выключено) 2 и сигналы 3, получаемые от датчиков тока, напряжений и скорости.
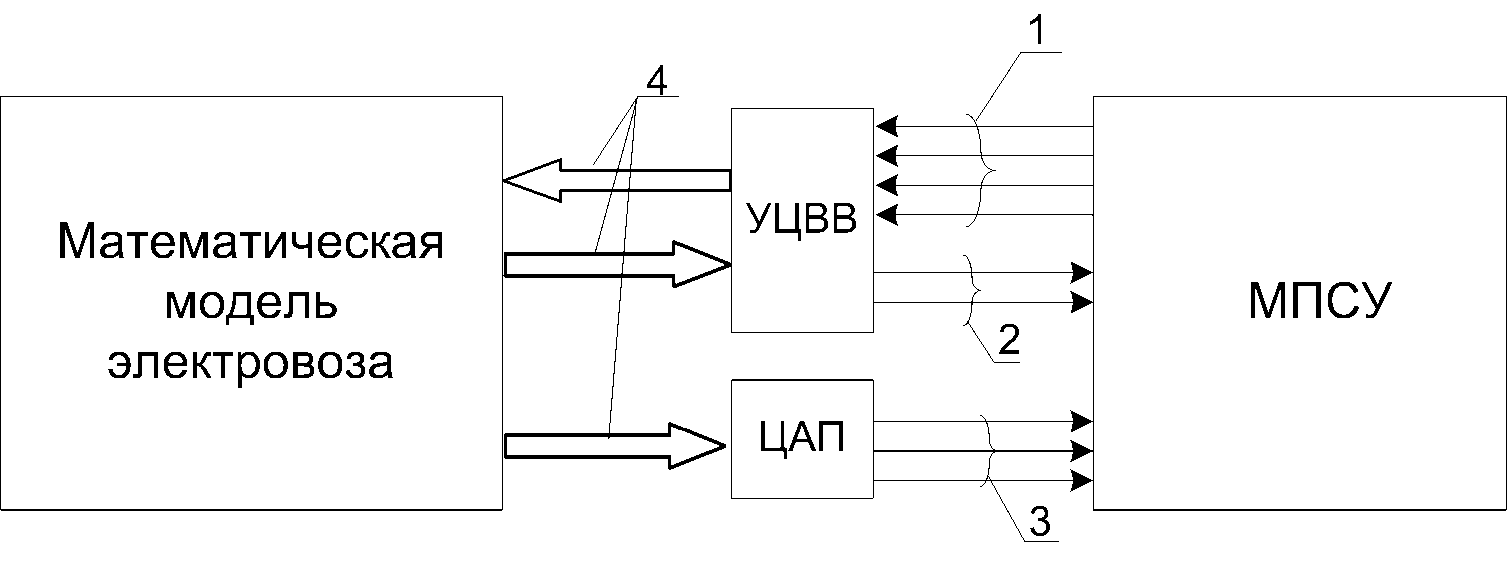
Рис. 1 Структура программно-аппаратного комплекса
1 -импульсы управления вентилями преобразователей и электрическими аппаратами, 2 - сигналы о состоянии электрических аппаратов (включено/выключено), 3 - сигналы, получаемые от датчиков тока, скорости и напряжения, 4 - соединительная шина
Вывод аналоговых сигналов из математической модели осуществляется через аналоговые выходы цифроаналогового преобразователя (ЦАП). В настоящее время широкое распространение получили ЦАП фирмы L-card, однако их шина не может стыковаться с компьютерами последнего поколения. Для работы с моделью требуется более современная аппаратура, позволяющая работать на высоких скоростях и отличающаяся малыми габаритами и ценой.
Данным требованиям отвечает плата цифроаналогового преобразователя (ЦАП) PCI-6713 и устройство цифрового ввода – вывода (УЦВВ) типа PCI-6509 фирмы National Instruments, которые и были выбраны для стыковки микропроцессорной системы управления с математической моделью электрической железной дороги и электровоза.
Частота работы ЦАП типа PCI-6713 достигает одного миллиона считываний в секунду на каждом из восьми аналоговых выходов. Кроме того, устройства этой серии имеют в наличии восемь цифровых входов (выходов), два 24 – битных 20 мегагерцовых счетчиков–таймеров и обладают возможностью цифровой синхронизации. Уровень выходного напряжения на каналах находится в пределах от –10В до +10В, однако использование внешнего источника опорного напряжения позволяет варьировать уровни сигналов на всех каналах. PCI-6713 может генерировать напряжение на всех восьми каналах одновременно. Устройства данного типа используют передатчики с прямым доступом к памяти и систему FIFO для вывода высокоскоростных непрерывных сигналов. Для регулирования скорости обновления информации используется встроенный таймер, но при необходимости можно подавать дополнительный сигнал обновления или сигнал запуска. Аналоговые сигналы выводятся наружу через 68 – контактный разъем с высокой степенью защиты. Для каждого аналогового выхода предусмотрен отдельный контакт заземления AOGND.
Входные импульсы управления, отвечающие за замыкание соответствующих контакторов, поступают в модель через входы УЦВВ типа PCI-6509 Эта плата предназначена для работы с компьютерными системами, построенными на базе 32-разрядных системных шин с возможностью расширения до 64 разрядов, взаимодействие через которую происходит без участия центрального процессора (PCI). С помощью данного устройства возможно вводить и выводить сигналы уровня 5 В, а также напрямую управлять такими внешними цифровыми устройствами, как бесконтактное реле (SSRs), причем уровень токов управления не должен превышать 24 мА. Каждая линия может служить как входом, так и выходом, кроме того, не требуется внешний источник для выходного сигнала. При помощи программируемого состояния включения можно задавать начальное значение выходного сигнала для избежания сбоев в работе, и сохранять текущую операцию при присоединении к промышленным механизмам (насосы, вентили, двигатели, реле). Используя «сторожевые» системы цифровых каналов, PCI-6509 понижает сигнал до допустимого уровня в случае возникновения ошибок в работе компьютера или приложений. Программируемые входные фильтры устраняют случайные помехи и обеспечивают легкое прохождение сигнала через программно - выбираемый цифровой фильтр.
Для работы с техническими устройствами последнего поколения, такими как PCI-6509 и PCI-6713, фирма National Instruments разработала приложение NI-DAQmx, ещё более ускоряющее и упрощающее выполнение задач пользователя. Технология NI-DAQmx включает в себя DAQ «ассистент», позволяющий осуществлять обмен информацией с внешними PCI, PXI и другими устройствами, не прибегая к программированию.
На рис. 2 приведен общий вид программы LabVIEW, моделирующей электромагнитные процессы в силовой цепи электровоза с релейно-контакторным управлением ЧС2К. В отличие от серийного, в электровозе ЧС2К групповой переключатель заменен на индивидуальные электропневматические контакторы с управлением от микропроцессорной системы управления локомотива (МПСУ).
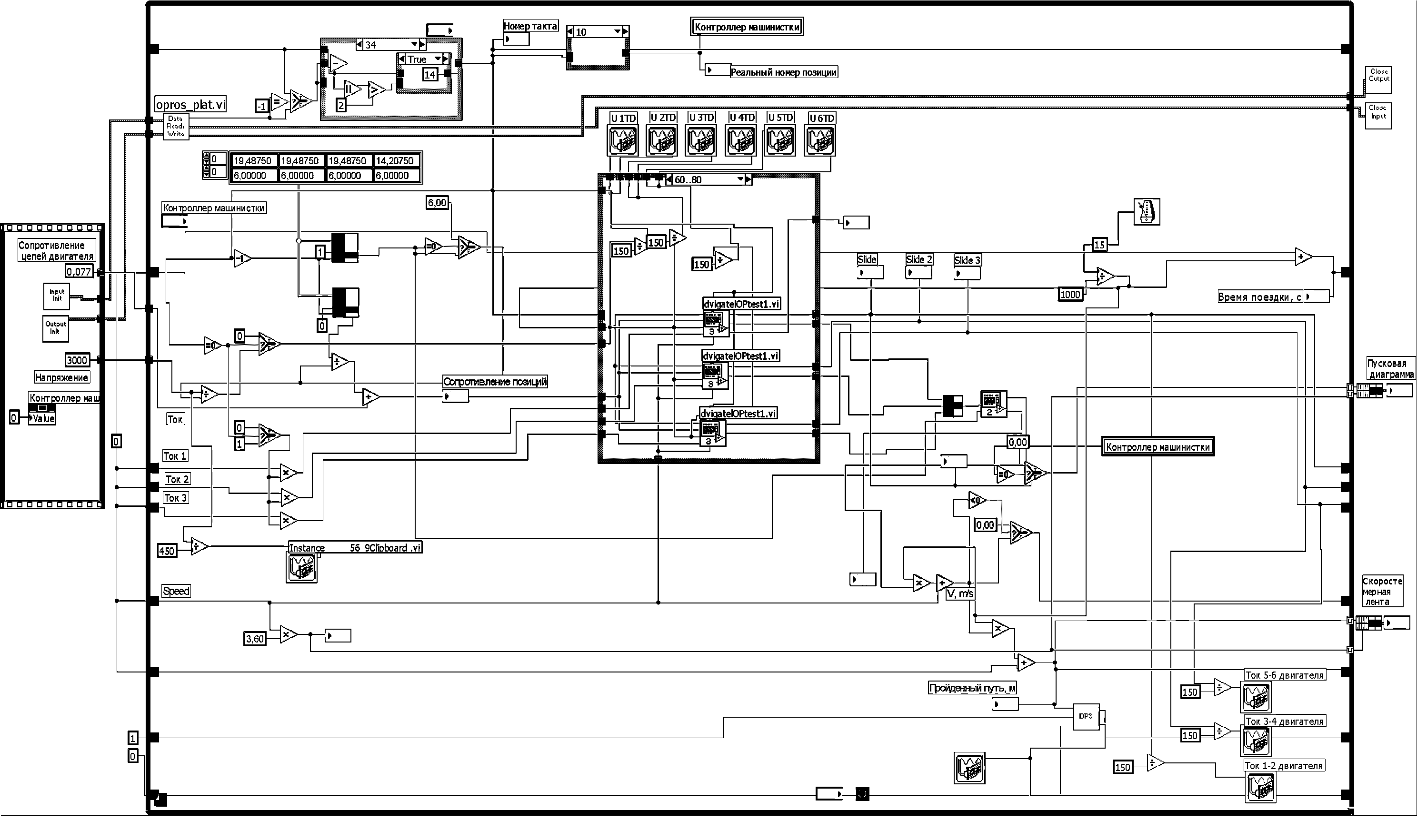 |
Рис. 2 Математическая модель электровоза ЧС2К |
В модели реализованы три соединения тяговых двигателей этого электровоза с последовательным выводом пусковых сопротивлений, а также четыре ступени ослабления поля на каждом соединении. Напряжение на шести тяговых двигателях выводится на каналы ЦАП типа PCI-6713 при помощи блоков DAQ «ассистент» “U TD1”, “U TD2”, “U TD3”, “U TD4”, “U TD5”, “U TD6” (рис. 2).
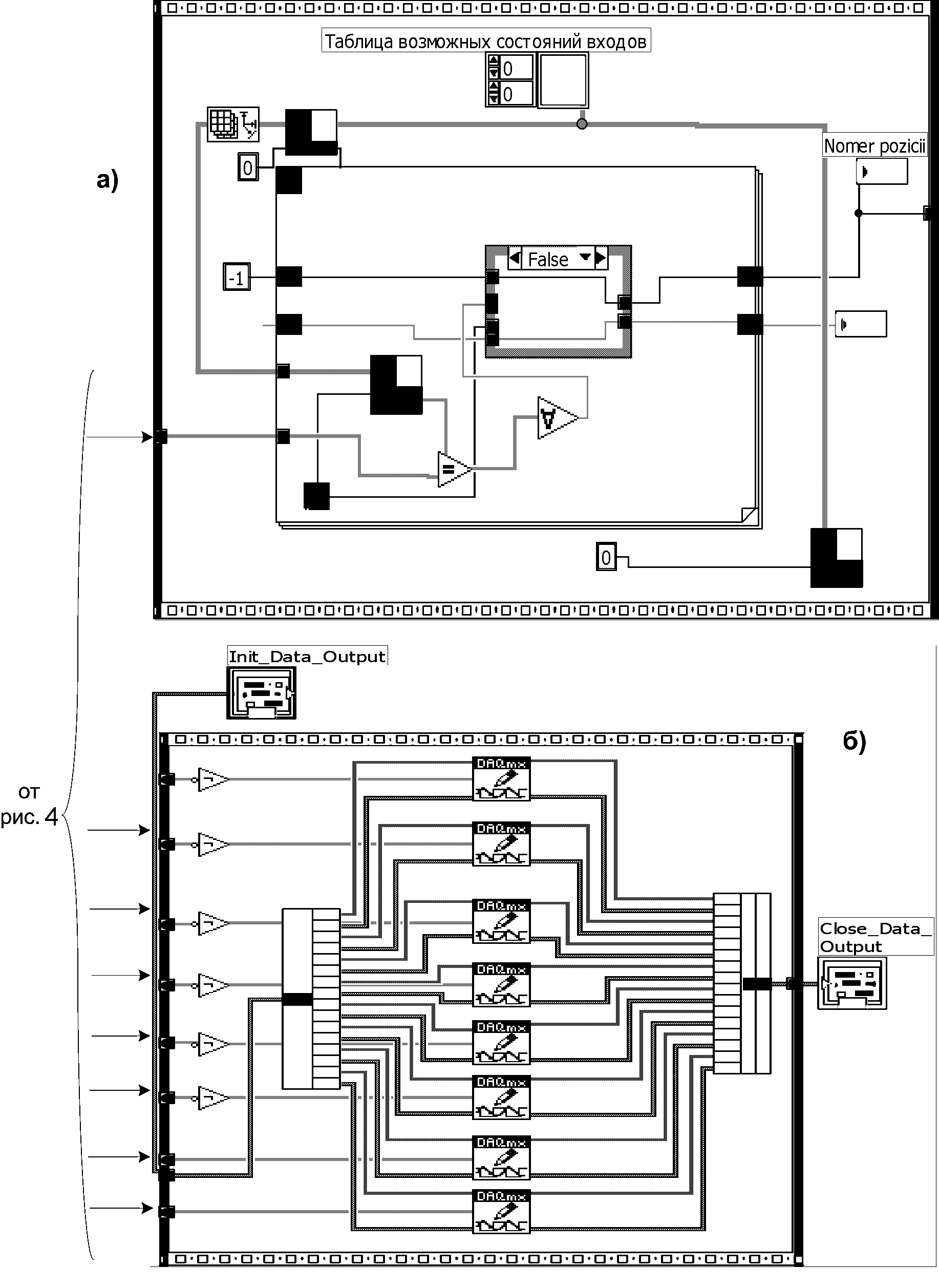
Вывод токов тяговых двигателей осуществляется через блоки «Ток 1-2 двигателя», «Ток 3-4 двигателя» и «Ток 5-6 двигателя» на соответствующие каналы ЦАП. Импульсы управления от УЦВВ, отвечающие за открытие соответствующего контактора, поступают в подпрограмму “Opros plat”, являющуюся частью программы. Эта подпрограмма разделена на четыре блока, попарно показанных на рис. 3 и рис. 4, эти блоки входят составной частью в программу матмодели.
| |
| Рис. 3 Блоки подпрограммы Opros Plat: a - подсистема считывания сигналов от УЦВВ б - подсистема обработки сигналов |

В блоке «а» происходит периодическое считывание импульсов управления, приходящих на УЦВВ от МПСУ, которые затем передаются в блок «б» для последующей обработки и группировки. Подсистемы на рис. 4 отвечают соответственно за формирование номера позиции (а) и за передачу сигналов о состоянии электрических аппаратов на МПСУ через выходные каналы УЦВВ. В результате обработки массива цифровых данных эта подпрограмма выводит соответствующий номер позиции. В соответствии с номером позиции модель электровоза вырабатывает токи и напряжения, которые поступают на цифровые каналы PCI-6509 и аналоговые выходы PCI-6713, а затем передаются уже непосредственно микропроцессорной системе управления. По данным, полученным от модели, уже можно судить об адекватности испытуемых алгоритмов управления и всей модели в целом. На цифровые вводы PCI-6509 подаются сигналы «0» или «1» о состоянии отдельных контакторов.
 |
| Рис. 4 Блоки подпрограммы Opros plat а - подсистема выбора номера позиции, б - подсистема передачи данных в УЦВВ |
Испытания данной модели были проведены с использованием микропроцессорной системы управления локомотива (МПСУ). На рис. 5 показана зависимость тока двигателя от времени движения локомотива с соответствующей этой зависимости диаграммой включения контакторов, кроме того, на рис. 6 приведена полученная в результате моделирования пусковая диаграмма электровоза v(i). Полученные данные соответствуют реальным значениям токов и напряжения электровоза в эксплуатации.
На основе полученных данных можно сделать вывод о том, что выбранные технические устройства для ввода и вывода цифровых и аналоговых сигналов подходят для включения их в комплекс, служащий для проверки микропроцессорных систем управления электроподвижного состава. С их помощью были отработаны алгоритмы управления и выполнена проверка программы моделирующей электровоз постоянного тока.
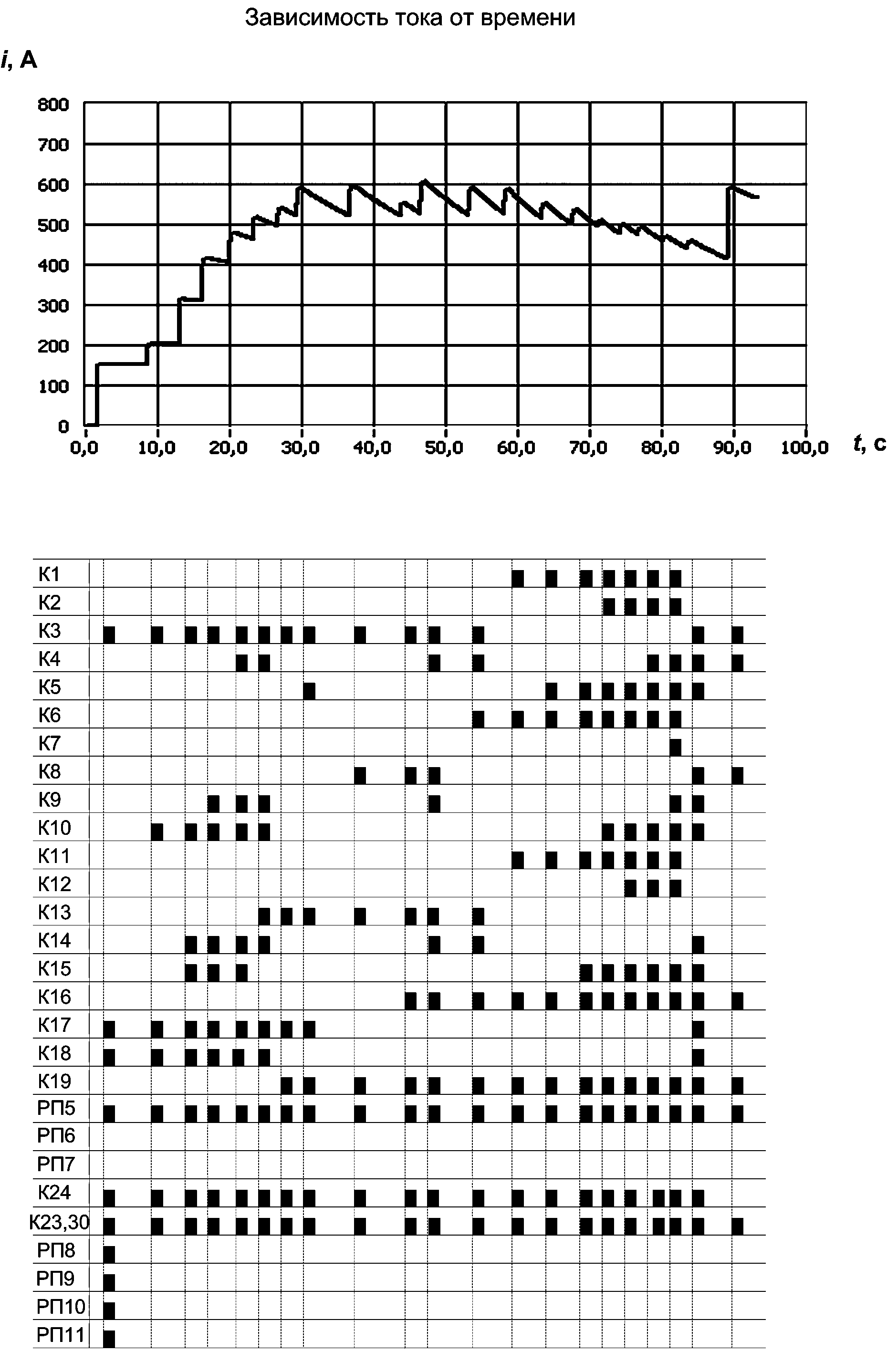 |
| Рис. 5. Зависимость тока двигателя от времени поездки |
.
| |
Рис. 6. Пусковая диаграмма электровоза ЧС2 |

Кроме того, платы фирмы National Instruments обеспечили связь в реальном времени между МПСУ и модель электровоза, что является существенным критерием для отработки алгоритмов управления. В дальнейшем планируется использовать PCI-6713 и PCI-6509 и для задач разработки систем управления электровозов однофазно-постоянного тока.
Литература.
- Пассажирский электровоз ЧС2. В. А. Раков. Изд-во “Транспорт”, 1967. Стр. 1-320
- LabVIEW7 Express User Manual, April 2003 Edition, COPYRIGHT 1992-2003 National Instruments Corporation.
- Measurements Manual, July 2000 Edition/ Copyright 1992, 2000 National Instruments Corporation.
- Модернизация электровоза ЧС2 с изменением схемы»: руководство по эксплуатации; 2003 г., Департамент локомотивного хозяйства, ПКБ ЦТ.