
Рекомендовано к изданию решением секции организации строительного производства цнииомтп госстроя СССР
| Вид материала | Решение |
- Справочное пособие к снип серия, 4082.72kb.
- Госстроя СССР пособие по разработке проектов организации строительства и проектов производства, 1284.3kb.
- Пособие к сниП 03. 11-85 по проектированию защиты, 5625.82kb.
- Пособие по проектированию защиты от коррозии бетонных и железобетонных строительных, 2915.42kb.
- Справочное пособие к снип серия основана в 1989 году, 779.11kb.
- Разработаны цнииомтп госстроя СССР д-р техн, 6368.71kb.
- Строительные нормы и правила нормы потребности в строительном инструменте, 4147.62kb.
- Пособие по проектированию автоматизации и диспетчеризации систем водоснабжения (к сниП, 770.91kb.
- Пособие по методам контроля качества сварных соединений металлических конструкций, 3669.88kb.
- Несущие и ограждающие конструкции, 7510.48kb.
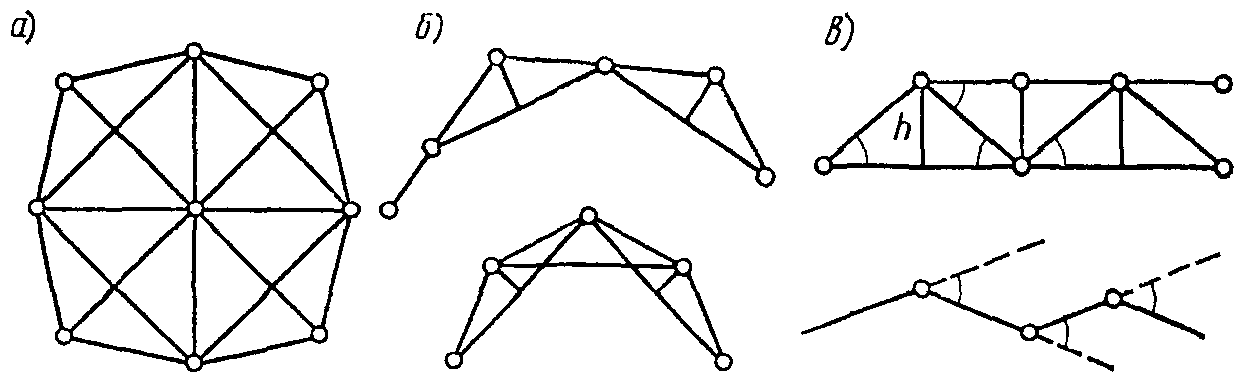
Рис. 13. Схемы внутренних разбивочных сетей
зданий и сооружений
а - радиально-кольцевые; б - кольцевые; в - линейные
6.5. В линейных и кольцевых сетях взаимное поперечное положение смежных пунктов определяют с высокой точностью. С увеличением числа треугольников точность определения пунктов понижается. Для повышения точности взаимного поперечного положения удаленных пунктов дополнительно измеряют углы, создавая линейно-угловые сети.
6.6. Построение плановой внутренней разбивочной сети здания (сооружения) начинается с перенесения разбивочных осей на исходный горизонт. Исходным горизонтом считается плоскость, проходящая через опорные площадки последних по высоте несущих конструкций подземной части перекрытия подвала, бетонная подготовка или блоки фундамента. Выбор точек плановой разбивочной сети здания, сооружения, принимаемых в качестве исходных для передачи на монтажные горизонты, определяется возможностью вертикального проектирования.
Число опорных точек, передаваемых на монтажные горизонты, должно быть не менее трех.
При переносе осей методом вертикального проектирования точки допускается закреплять вне корпуса здания и проектировать их по вертикали на площадки (палетки), укрепленные на выносных кронштейнах.
При наклонном проектировании осей на монтажные горизонты разбивочная сеть создается на исходном горизонте таким образом, чтобы точки пересечения продольных и поперечных осей располагались как можно ближе к внешним габаритам здания.
6.7. Базисные фигуры разбивочных сетей строятся на исходном горизонте так, что по своей форме повторяют конфигурацию здания и состоят, в основном, из типовых правильных геометрических фигур, стороны которых располагают параллельно осям здания так, чтобы разбивка осей выполнялась непосредственно линейными промерами вдоль сторон базисной фигуры или методом построения створов.
6.8. Построение плановой разбивочной сети на исходном горизонте выполняется в следующем порядке:
построение основных (угловых) точек плановой сети;
проложение основного хода по исходным точкам (или измерение сторон и диагоналей при трилатерационных способах);
редуцирование основных точек плановой разбивочной сети;
контрольные измерения;
построение промежуточных точек.
6.9. Взаимное положение вершин базисной фигуры определяется в результате выполнения измерений. Длины сторон базисной фигуры измеряются компарированной рулеткой с миллиметровыми делениями. Угловые измерения выполняются оптическими теодолитами. Длина сторон базисной фигуры обычно не превышает 50 м.
6.10. На прямоугольных фундаментах разбивочную плановую сеть удобнее строить в виде прямоугольных четырехугольников, вершины которых находятся на пересечениях параллельно смещенных основных осей.
6.11. Для редуцирования точек базисной фигуры в проектное положение прокладывается полигонометрический ход или координаты точек определяются методом микротрилатерации. Для упрощения вычислений применяют условную систему координат, принимая координаты одной из точек сети за начальные, а направление осей координат параллельное продольной и поперечной осям.
6.12. В полигонометрических ходах измерение углов и линий выполняется в зависимости от класса точности построения базисной сети. Для получения значений редукций вычисляются теоретические и фактические координаты точек сети.
6.13. Для введения редукций составляются редукционные листы на миллиметровой бумаге, содержащие номер точки, фактическое положение точки, теоретическое положение точки, направление не менее чем на два пункта сети, линейное и угловое значение редукций.
6.14. Редукции вводят в натуру, совмещая изображение действительного положения точки на редукционном листе с положением точки в натуре. Далее редукционный лист ориентируют по одному направлению, а контролируют ориентировку по другим направлениям.
Теоретическое положение точки с редукционного листа переносят на пластины. По линейному и угловому значениям редукции контролируют положение точки на исходном горизонте и окончательно закрепляют ее (рис. 14).
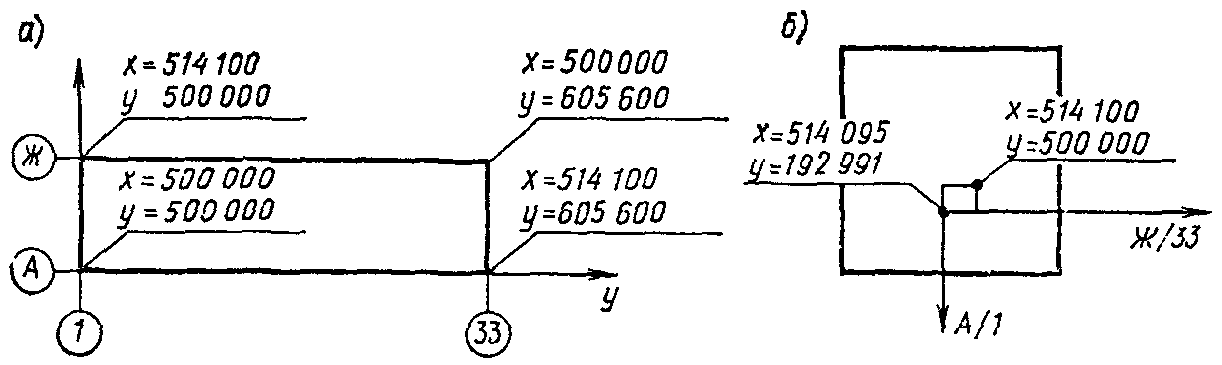
Рис. 14. Редуцирование точек разбивочной сети здания
на исходном горизонте
а - проектные данные; б - схема введения редукции
6.15. По отредуцированным точкам сети прокладывается контрольный полигонометрический ход, точность которого такая же, как и основного полигонометрического хода.
6.16. По результатам измерений контрольного хода вычисляются окончательные значения координат точек плановой разбивочной сети на исходном горизонте.
Расхождение проектных координат и полученных по данным контрольного хода
 не должно превышать величины
не должно превышать величины ,
,где S - расстояние по оси между наиболее удаленными точками;
T - знаменатель предельной относительной погрешности построения сети.
6.17. При строительстве зданий башенного типа, когда стороны базисной фигуры на исходном горизонте не превышают длины мерного прибора, и возникают трудности в измерении горизонтальных углов из-за коротких линий, рекомендуется создавать и редуцировать базисную сеть на исходном горизонте методом трилатерации, т.е. измерять все линии и диагонали в базисной сети.
6.18. Окончательно определенные точки внутренней разбивочной сети на исходном горизонте надежно закрепляются и маркируются несмываемой краской (рис. 15).
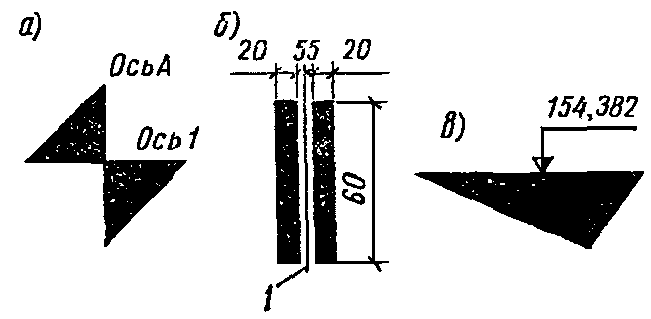
Рис. 15. Откраска осей (а, б) и отметок (в)
на конструкциях зданий и сооружений
1 - карандашная риска
Передача плановой и высотной сети здания
на монтажный горизонт
6.19. Передачу плановой сети с исходного горизонта на монтажный производят методом наклонного проектирования теодолитом при возведении зданий малой и средней этажности, а также при наличии больших свободных территорий в границах строительной площадки.
6.20. Среднюю квадратическую погрешность проектирования точки плановой сети на монтажный горизонт
 при двух положениях вертикального круга теодолита вычисляют по формуле
при двух положениях вертикального круга теодолита вычисляют по формуле , (26)
, (26)где h - высота, на которую проектируется точка;
S - расстояние от теодолита до проектируемой точки;
 - цена деления цилиндрического уровня при горизонтальном круге теодолита;
- цена деления цилиндрического уровня при горизонтальном круге теодолита;l - отклонение проектируемой точки от вертикали, проходящей через точку плановой основы;
V - увеличение зрительной трубы теодолита;
 ,
,  - средние квадратические погрешности установки теодолита в створ и фиксации проектируемой точки на монтажном горизонте;
- средние квадратические погрешности установки теодолита в створ и фиксации проектируемой точки на монтажном горизонте; .
.6.21. Передачу плановой сети с исходного горизонта на монтажный в условиях стесненной строительной площадки, а также при возведении зданий и сооружений повышенной этажности и высотных производят методом вертикального проектирования.
Для передачи точек плановой сети на монтажный горизонт методом вертикального проектирования, если они располагаются внутри здания, необходимо иметь отверстия в плитах перекрытия, расположенные над точками плановой основы.
Проектирование выполняют приборами вертикального проектирования (PZL, ПОВП, ОЦП, ЛЗЦ), а также лазерными геодезическими приборами.
Над приборами вертикального проектирования при их расположении внутри здания, сооружения для предохранения их от строительного мусора устанавливают ловушку над первым от прибора отверстием (рис. 16). При расположении приборов вне контура здания над местами их установки оборудуются защитные навесы.
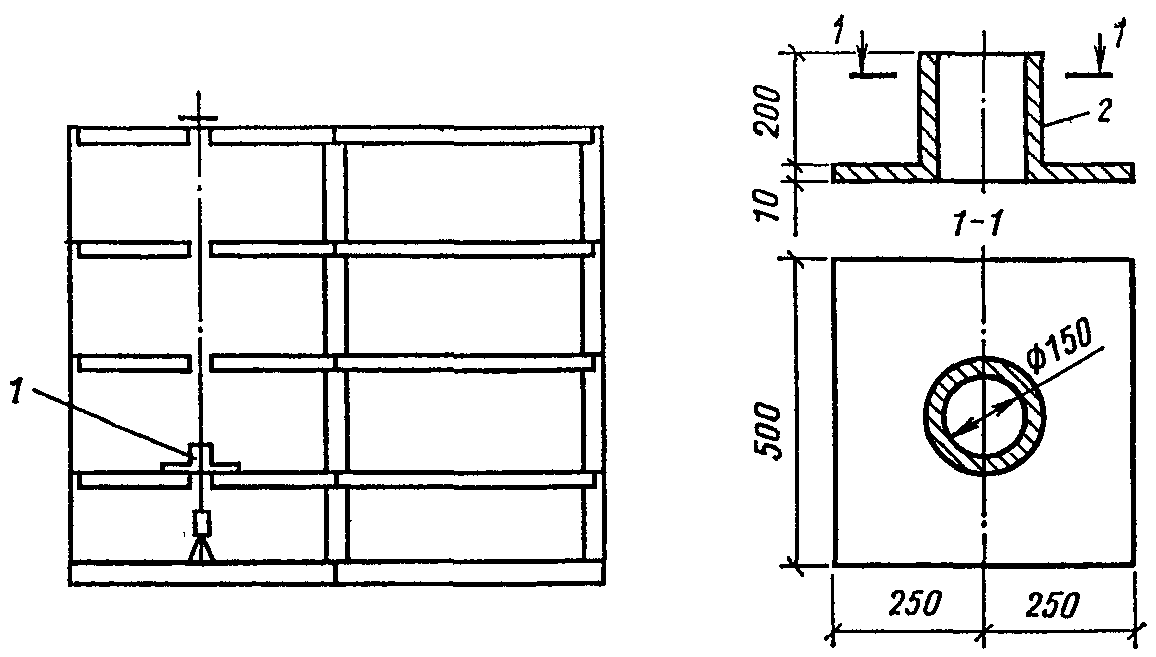
Рис. 16. Ловушка, схема ее установки
1 - ловушка; 2 - труба
Передачу проекции точки плановой основы с исходного горизонта на монтажный производят путем отсчитывания по палетке, установленной на монтажном горизонте.
Палетка представляет собой координатную сетку, нанесенную на кальку и наклеенную на органическое стекло разграфкой вниз.
Проектирование точки выполняют при четырех положениях прибора: 0°, 90°, 180° и 270°. Найденное из четырех отсчетов положение плановой точки фиксируют на палетке и закрепляют створными рисками на перекрытии.
Среднюю квадратическую погрешность положения спроектированной точки
можно вычислить по формуле , (27)
, (27)где h - превышение между исходным и монтажным горизонтами;
v - увеличение зрительной трубы;
 - погрешность приведения визирной оси прибора в отвесное положение;
- погрешность приведения визирной оси прибора в отвесное положение; - погрешность центрирования прибора над проектируемой точкой;- погрешность фиксации точки на палетке.
- погрешность центрирования прибора над проектируемой точкой;- погрешность фиксации точки на палетке.Погрешность приведения визирной оси в отвесное положение для приборов с компенсаторами берут из паспорта прибора, для приборов с цилиндрическим уровнем вычисляют по формуле
 , где - цена деления уровня.
, где - цена деления уровня.Точность передачи точек плановой основы контролируют путем сравнения измеренного расстояния между полученными точками на монтажном горизонте
 с расстоянием между этими же точками на исходном горизонте
с расстоянием между этими же точками на исходном горизонте  . Контрольные измерения должны быть выполнены с той же точностью, что и разбивка плановой основы на исходном горизонте. Допустимое расхождение
. Контрольные измерения должны быть выполнены с той же точностью, что и разбивка плановой основы на исходном горизонте. Допустимое расхождение  между расстояниями и определяют по формуле
между расстояниями и определяют по формуле , (28)
, (28)где
- средняя квадратическая погрешность передачи точки плановой основы на монтажный горизонт; - относительная средняя квадратическая погрешность разбивки осей на исходном горизонте [15].
- относительная средняя квадратическая погрешность разбивки осей на исходном горизонте [15].При недопустимом расхождении проектирование точек повторяют.
6.22. Перенесение осей на монтажный горизонт с помощью лазерного прибора производится в такой последовательности:
прибор приближенно устанавливают над знаком и приводят его в рабочее положение;
направляют лазерный пучок прибора в "надир" и с помощью центрировочного столика наводят этот пучок на центр знака;
переключают пентапризму прибора и направляют лазерный пучок в "зенит", в этот момент лазерный пучок попадает на экран мишени, закрепленной на монтажном горизонте. Центр лазерного пятна на экране марки есть проекция центра знака на монтажном горизонте.
Для повышения точности перенесения осей и исключения ошибок за наклон лазерного пучка проектирование выполняют четырьмя приемами с перестановкой прибора на 90°.
Точность вертикального проектирования m лазерным геодезическим прибором с визуальной регистрацией пятна вычисляется по формуле:
 , (29)
, (29)где
- погрешность центрирования прибора; - погрешность определения центра пятна;- погрешность фиксации центра пятна на мишени;- погрешность приведения лазерного пучка в отвесное положение;
- погрешность определения центра пятна;- погрешность фиксации центра пятна на мишени;- погрешность приведения лазерного пучка в отвесное положение; - погрешность наклона оси вращения прибора.
- погрешность наклона оси вращения прибора.Например, при проектировании точки на высоту 50 м лазерным прибором ПИЛ-1 средняя квадратическая погрешность равна 3,9 мм.
6.23. Отметки на монтажный горизонт следует передавать только от марок и реперов высотной основы, заложенной на исходном горизонте.
На монтажном горизонте должно быть не менее двух рабочих реперов. Рабочими реперами служат закладные детали в смонтированных конструкциях, монтажные петли плит перекрытий, дюбели, горизонтальные открашенные риски на арматуре, конструкциях (рис. 17).
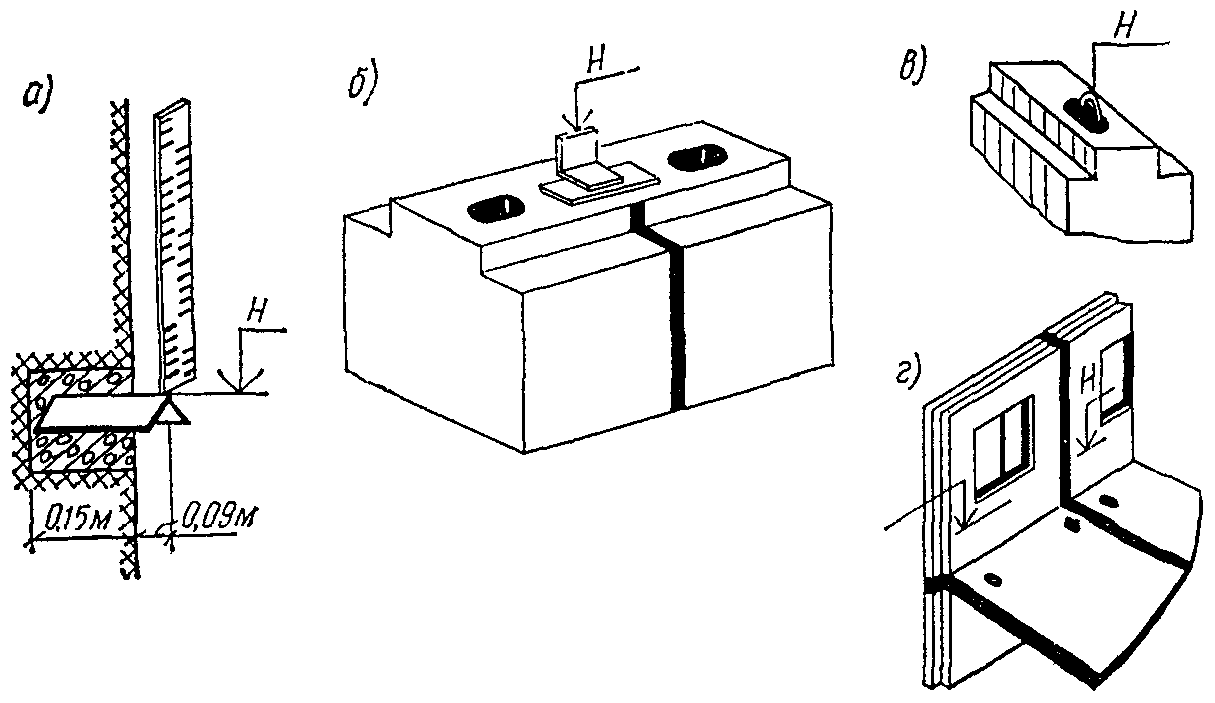
Рис. 17. Знаки закрепления высотной разбивочной сети
а - стенной репер в виде угольника; б - металлическая
плашка; в - монтажная петля; г - откраска на панели
6.24. При перенесении отметок с исходного горизонта на монтажный отметки исходного горизонта принимаются стабильными, независимо от осадок основания. Перенесение отметок осуществляется или непосредственным измерением по вертикально установленным конструкциям от репера на исходном горизонте до монтажного горизонта, или методом геометрического нивелирования с помощью двух нивелиров и подвешенной рулетки (рис. 18).
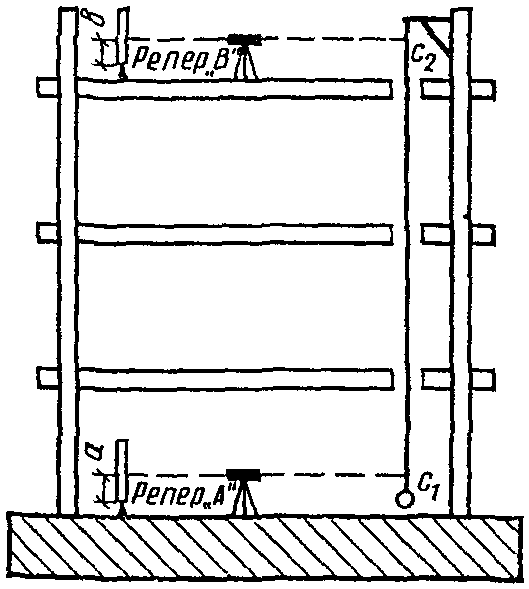
Рис. 18. Передача отметок на монтажный горизонт
Отметку рабочего репера на монтажном горизонте
 определяют по формуле
определяют по формуле , (30)
, (30)где
 - отметка репера на исходном горизонте;
- отметка репера на исходном горизонте;a - отсчет по рейке, установленной на репере исходного горизонта;
 - отсчет по рулетке на монтажном горизонте;
- отсчет по рулетке на монтажном горизонте; - отсчет по рулетке на исходном горизонте;
- отсчет по рулетке на исходном горизонте;b - отсчет по рейке, установленной на репере монтажного горизонта.
При подсчете отметки репера на монтажном горизонте необходимо учитывать поправки за компарирование и температуру рулетки при измерении.
6.25. Для передачи отметок на монтажные горизонты может быть использован лазерный прибор ПИЛ-1 с фотоприемником и стальной рулеткой, подвешенной к кронштейну. На монтажном горизонте измерения производят по рулетке визуально и по фотоприемнику, укрепленному на специальной рейке, установленной на репере.
На каждой станции измерения производятся при двух горизонтах прибора ПИЛ-1.
В отсчеты, сделанные по рулетке, вводят поправки за компарирование, растяжение и температуру.
Поправка за растяжение рулетки от груза, подвешенного к ней,
 определяется как
определяется как ,
,где Q - масса груза;
l - длина рулетки; E - модуль упругости (для стали
 );
);f - площадь поперечного сечения рулетки, см2.
Поправка за температуру
 определяется из выражения:
определяется из выражения: ,
,где
 - коэффициент термического расширения рулетки (для стали = 0,0000125);
- коэффициент термического расширения рулетки (для стали = 0,0000125);t - температура рулетки в процессе измерений;
 - температура компарирования.
- температура компарирования.Температуру t определяют на первой и второй станциях и за окончательное ее значение принимают среднее.
Средняя квадратическая погрешность определения превышения между исходным и монтажным горизонтом
 включает погрешность определения превышения на исходном
включает погрешность определения превышения на исходном  и монтажном
и монтажном  горизонтах, а также погрешность
горизонтах, а также погрешность  определения температуры рулетки
определения температуры рулетки . (31)
. (31)Например, при перенесении отметки лазерным прибором ПИЛ-1 на высоту 50 м средняя квадратическая погрешность равна 2,8 мм.
Уравнивание внутренней разбивочной сети здания
(сооружения)
6.26. Уравнивание внутренней разбивочной сети здания (сооружения) на исходном горизонте выполняется любым из способов, изложенных в разд. 3.
6.27. Уравнивание разбивочной сети на исходном горизонте необходимо для получения наиболее надежных значений параметров сети и приведения ее геометрической формы к проектному очертанию.
6.28. Проектирование точек внутренней разбивочной сети здания с исходного на монтажные горизонты приводит к смещению точек базисной фигуры, поэтому на монтажных горизонтах выполняют повторные измерения. В этой ситуации возможны три случая:
отклонения всех измеренных элементов от соответствующих измерений, выполненных на исходном горизонте, не выходят за пределы погрешностей измерений;
отклонения измеренных элементов выходят за пределы погрешностей измерений, но остаются в границах совместного действия погрешностей измерений и погрешностей проектирования;
хотя бы одно измерение отличается от измерения, выполненного на исходном горизонте, на величину, выходящую за пределы погрешностей измерений и проектирования.
В первом случае рекомендуется оставить точки базисной фигуры на монтажном горизонте без изменения; во втором - выполнить уравнивание измерений на монтажном горизонте и редуцировать фигуру до проектной; в третьем случае необходимо повторить проектирование с исходного горизонта.
6.29. При уравнивании внутренней разбивочной сети здания на монтажных горизонтах рекомендуются алгоритмы уравнивания свободных геодезических сетей при условии, что в сети нет абсолютно твердых пунктов, сторон и направлений [11, 16, 17]. При этом за неизменные элементы принимаются координаты центра тяжести фигуры и ее средний дирекционный угол. Решение (в данном случае редукционные поправки в координаты точек базисной фигуры) является статистически оптимальным.
6.30. Рекомендуется и упрощенный вариант такого уравнивания, когда сеть уравнивают, как свободную в обычном смысле, с одним твердым пунктом и одним твердым направлением, а затем осуществляют разворот и параллельный ее сдвиг. При этом вначале вычисляют угол разворота
 :
: ;
;  ;
;  , (32)
, (32)где