
Ютерна обробка результатів вимірювань
| Вид материала | Документы |
- Назва модуля: Взаємозамінність, стандартизація та технічні вимірювання Код модуля:, 47.16kb.
- Закон україни, 450.74kb.
- Закон україни, 443.95kb.
- Інститут комп’ютерних технологій, автоматики І метрології, 125.75kb.
- О. В. Родіонова методичні вказівки до розробки та оформлення диплом, 502.74kb.
- Метою якісного метрологічного забезпечення є дотримання єдності й точності вимірювань, 26.94kb.
- Формат опису модуля назва модуля: Опрацювання результатів вимірювань, випробувань, 33.29kb.
- Додаток використання комп’ютера для графічного оформлення результатів вимірювань, 42.39kb.
- Підприємство порушило терміни подання податкової звітності. Чи будуть застосовані фінансові, 8.17kb.
- Аудиторні години 48 лекції 32, лабор роб, 44.36kb.
КОМП’ЮТЕРНА ОБРОБКА РЕЗУЛЬТАТІВ ВИМІРЮВАНЬ
Невмира І.В. ст.гр. АТП-27д
Наукові керівники: к.т.н., доц. Горбатюк А.Ф., к.т.н., доц. Горбатюк С.А.
Технологічний інститут СНУ ім. В. Даля (м. Сєвєродонецьк)
Мета роботи - мотивація доцільності попередньої обробки результатів вимірювань в комп’ютерно – інтегрованих системах управління (КІСУ) безпосередньо датчиками.
Важливе місце в програмному забезпеченні КІСУ займає комп’ютерна обробка результатів вимірювань [1]. З’ясуємо це докладніше на прикладі обробки результатів вимірювань при наявності вірогідних перешкод. Результат вимірювань, при наявності вірогідної складової, можна представити наступним чином: y= y* + , де y – результат вимірювань, y* – фактичне значення, – вірогідна перешкода.
Відомо, що для обробки результатів вимірювань доцільно використовувати наступні рекурентні рівняння [2]:
 . . | (1) |
| y[i] = y[i-1] - (1/i) (y[i-1] - y[i]). | (2) |
Ці рівняння дозволяють зробити такі висновки:
- зі зростанням кількості вимірювань (i) в кожному обрахунковому циклі вплив збурень зменшується, оскільки при i ,
 0, а результат вимірювань наближається до фактичного значення y[i] y*;
0, а результат вимірювань наближається до фактичного значення y[i] y*;- зі зростанням кількості вимірювань в кожному обрахунковому циклі вплив нової інформації y[i] зменшується, оскільки її вага, що дорівнює 1/i, зворотно пропорційна кількості вимірювань, як наслідок, y[i] y[i-1].
Поширимо представлені висновки на структуру та технічні пристрої КІСУ. Для того, щоб отримати y* в межах прийнятної похибки, потрібно до обробляючої частини КІСУ передавати від датчика досить часто інформацію про результати вимірювань. Припустимо, що i = М, де М>1 – та кількість вимірювань, яка забезпечує прийнятну похибку, при котрій y[М] y*. Цілком зрозуміло, що велика кількість датчиків може настільки “завантажити” канали зв’язку, що КІСУ не буде в змозі виконувати свої функції в реальному часі.
Усунення цієї вади можливо двома шляхами: організацією КІСУ на підставі комп’ютерних систем; використання в складі КІСУ так званих інтелектуальних датчиків. Перша можливість є досить універсальною, в повній мірі спроможна забезпечити потрібну продуктивність при обробці значної кількості вимірювальної інформації в реальному часі, але вимагає використання значних технічних і програмних ресурсів.
Використання інтелектуальних датчиків, тобто датчиків, які безпосередньо в своєму складі мають вбудований комп’ютерний чип, також є корисним напрямком, бо виконує попередню обробку результатів вимірювань в реальному часі та визволяє від цієї роботи обробляючу частину КІСУ і знімає навантаження з каналів зв’язку [3]. Дослідження моделі попередньої обробки результатів вимірювання в КІСУ було виконано засобами алгоструктурної технології [4]. З цього приводу розроблено та складено відповідну алгоструктуру (рис.1).
Сучасні комп’ютерні можливості забезпечують широке використання однокришталевих комп’ютерних чипів в вимірювальній техніці. Серед них є сенс в першу чергу назвати такі, які мають можливість обробляти та вести обмін інформацією, що представлена як в цифровій формі, так і в аналоговій.
Але не зважаючи на те, що з економічних міркувань використання інтелектуальних датчиків поки що є більш привабливим, ніж побудова комп’ютерної системи, напевно в майбутньому доцільними будуть КІСУ, що поєднують зазначені два підходи в організації обробки результатів вимірювань. Про це свідчать також результати моделювання, які зроблено на підставі алгоструктурної технології (рис.2).
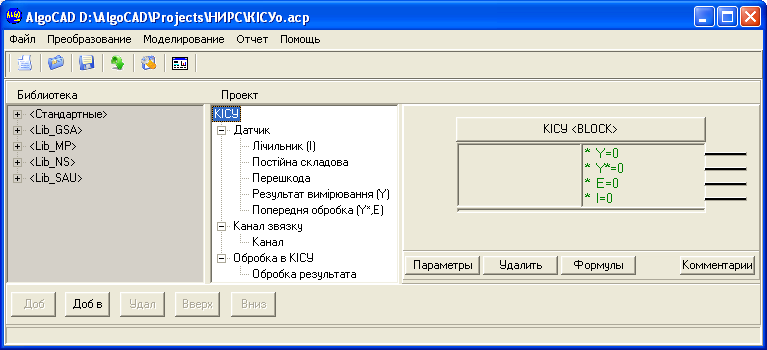
Рисунок 1. Модель для дослідження процесу попередньої обробку результатів вимірювань в КІСУ
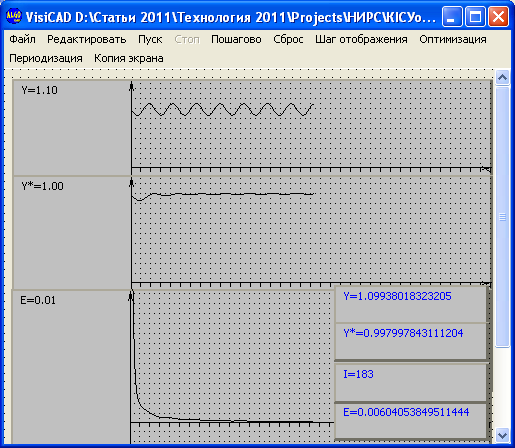
Рисунок 2. Моделювання процесу попередньої обробку результатів вимірювань в КІСУ
ДЖЕРЕЛА:
1. Нестеров А. Л. Проектирование АСУТП. Книга 2. / Нестеров А. Л. – СПб.: ДЕАН. – 2009. - 944 с.
2. Цыпкин Я. З. Адаптация и обучение в автоматических системах / Цыпкин Я.З. – М.: Наука, 1968. – 400с.
3. Минтчелл, Гэри A. (Gary A. Mintchell). Средства и системы компьютерной автоматизации. Пришла пора интеллектуальных датчиков / Гэри А. Минтчелл // Control Engineering. - 2002. - №1. - 56-59.
4. Горбатюк А.Ф. Структурно-алгоритмічне проектування обчислювальних процесів (Технологія, методи, моделі). / Горбатюк А.Ф, Горбатюк С.А. ; под ред. проф. О.Г. Руденко - Луганск: СНУ ім. В.Даля, 2010. - 224 с.