
Плавный пуск двигателя постоянного тока по системе "Широтно-импульсный преобразователь - двигатель постоянного тока"
height="24" align="BOTTOM" border="0" />|
|
0 | 33 | 66 | 99 | 132 | 165 | 198 | 231 | 265 |
| IД. СР | 13 | 11.4 | 9.7 | 8.1 | 6.5 | 4.9 | 3.3 | 1.7 | 0 |
Таблица
7.7 Среднее значение
тока обратного
диода при

|
|
0 | 22 | 44 | 66 | 88 | 110 | 132 | 154 | 177 |
| IД. СР | 13 | 11,4 | 9.7 | 8.1 | 6.5 | 4.9 | 3.3 | 1.7 | 0 |
Таблица
7.8 Среднее значение
тока обратного
диода при

|
|
0 | 12 | 24 | 36 | 48 | 60 | 72 | 84 | 90 |
| IД. СР | 8.7 | 7.5 | 6.3 | 5.1 | 3.9 | 2.8 | 1.6 | 0.4 | 0 |
Зависимость среднего действующего тока в обратном диоде от относительной длительности включения транзистора представлена на рисунке 7.2

Рисунок 7.2 Зависимость среднего действующего тока в диоде от скважности.
Где кривая “1” – при скорости 314 рад/с;
кривая “2” – при скорости 250 рад/с;
кривая “3” – при скорости 150 рад/с;
кривая “4” – при скорости 50 рад/с.
8. Расчет энергетических характеристик
Потери в двигателе складываются из переменных, зависящих от нагрузки, и постоянных потерь, не зависящих от нагрузки.
Мощность потребляемая двигателем равна:
 ;
(8.1)
;
(8.1)
где
 Вт
- номинальная
мощность двигателя.
Вт
- номинальная
мощность двигателя.
 Вт;
Вт;
 Вт;
Вт;
Потери мощности в якоре двигателя определяются из выражения:
 ;
(8.2)
;
(8.2)
 Вт;
Вт;
Номинальные потери в двигателе:
 ;
(8.3)
;
(8.3)
 Вт;
Вт;
Механические потери двигателя постоянного тока составляют 0.5% от номинальных потерь:
 ;
(8.4)
;
(8.4)
 Вт;
Вт;
Потери в стали:
 (8.5)
(8.5)
Для
построения
зависимости
 и
и
 можно воспользоваться
(4.2) преобразовав
ее следующим
образом:
можно воспользоваться
(4.2) преобразовав
ее следующим
образом:
 ;
;
 ;
;
 ;
(8.6)
;
(8.6)
 ;
(8.7)
;
(8.7)
 ;
(8.8)
;
(8.8)
 ;
(8.9)
;
(8.9)
 ;
(8.10)
;
(8.10)
 ;
(8.11)
;
(8.11)
Расчетные
значения функции
представлены
в таблице 8.1
Таблица
8.1 Расчет функции
|
|
417 | 360 | 314 | 250 | 200 | 120 | 70 |
|
|
1 | 0.69 | 0.55 | 0.43 | 0.37 | 0.3 | 0.26 |

В графической
форме расчет
значений
 изображен на
рисунке 8.1
изображен на
рисунке 8.1
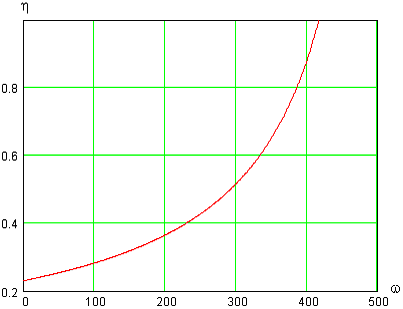
Рисунок 8.1 Зависимость К.П. Д от скорости
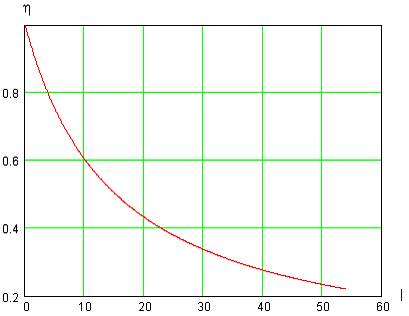
Расчетные
значения функции
представлены
в таблице 8.2
Таблица
8.2 Расчет функции
|
|
0 | 3 | 7 | 12.5 | 25 | 40 | 51 |
|
|
1 | 0.84 | 0.69 | 0.55 | 0.38 | 0.28 | 0.23 |

В графической
форме расчет
значений
изображен на
рисунке 8.2
9. Математическая модель системы ШИП – ДПТ
Математической моделью системы ШИП – ДПТ для плавного пуска будет являться модель обычного ДПТ, с той лишь разницей, что на якорь напряжение должно подаваться импульсами с возрастающей скважностью. Моделью системы может быть модель представлена на рисунке 1 выполнена в пакете “Matlab”
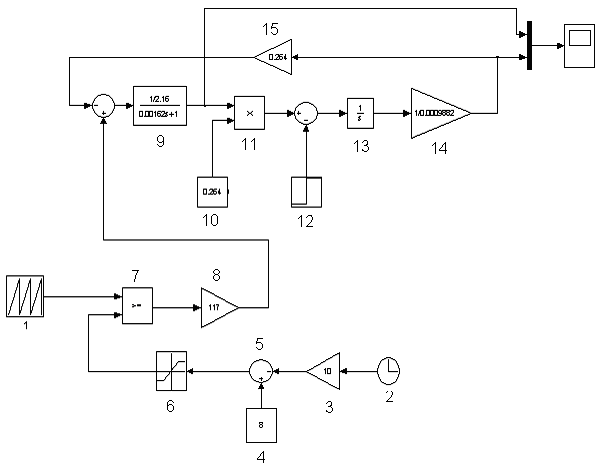
Рисунок 1 Модель системы ШИП – ДПТ
Генератор
пилообразных
колебаний “1”
вырабатывает
колебания
пилообразной
формы с периодом
равным периоду
коммутации
транзистора
 ,
и амплитудой
равной “10” форма
которых представлена
на рисунке 2.
,
и амплитудой
равной “10” форма
которых представлена
на рисунке 2.
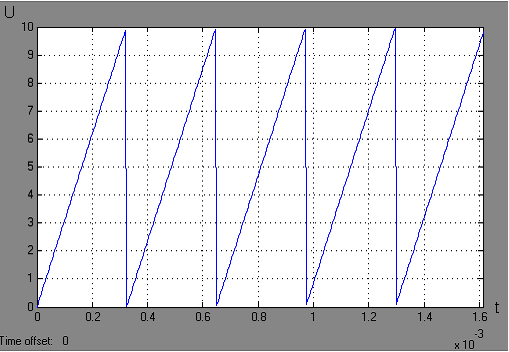
Рисунок 2 Сигнал 1 на входе компаратора
Блоки “2” и “3” формируют возрастающую во времени функцию, наклон которой может регулироваться изменением коэффициента блока “3”. В нашем случае коэффициент должен быть равным амплитуде пилообразных колебаний.
Предполагается,
что формирование
импульсов
происходит
с минимального
значения скважности
принятого,
например,
.
Изменять начальную
скважность
можно изменяя
значение блока
“4”. С возрастанием
времени будет
уменьшаться
разность функций
после сумматора
“5”. Ограничение
этого разностного
сигнала с помощью
блока ограничения
“6” на уровне
равном “0.6”,
позволит в
дальнейшем
получить рассчитанную
ранее номинальную
скважность
 .
.
Вид полученного разностного сигнала с ограничением на уровне “0.6” представлен на рисунке 3.
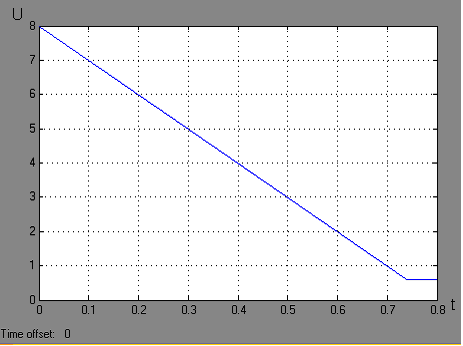
Рисунок 3 Сигнал 2 на входе компаратора
Этот сигнал поступает на вход компаратора “7” совместно с сигналом от блока пилообразных колебаний. На компараторе эти два сигнала сравниваются, и в моменты времени когда функции оказываются равными, компаратор “7” на выходе выдает единичный импульс. Сигнал с выхода компаратора показан на рисунке 3. Рассмотрен не все время пуска, а только три периода коммутации ключа ввиду сильного загромождения графика.

Рисунок 4 Формирование импульсов.
С помощью усилителя
“8” полученные
импульсы усиливаются
до величины
требуемого
напряжения
 В.
В.
Модель
двигателя
постоянного
тока применяется
стандартной
и подробно
описываться
не будет. Данные
для моделирования
ДПТ берутся
из расчета
схемы замещения.
Блок “9” является
передаточной
функцией Uя=>Iя.
Далее полученный
ток умножается
на блоке умножения
“11” с потоком
полученным
с блока “10”.
Полученный
в результате
умножения
момент складывается
на сумматоре
с моментом
сопротивления
имеющим отрицательный
знак. Во избежание
захода скорости
в отрицательную
область в начальные
моменты времени,
момент сопротивления
подается лишь
после достижения
двигателем
номинальной
скорости. Это
реализовано
с помощью блока
“12”. Блоки “13”
и “14” являются
передаточной
функцией вида
М-Мс=> .
Противо-Э.Д.С.
определяется
умножением
угловой скорости
на поток в блоке
“15”. Сравнение
угловых скоростей
и токов якоря
при прямом и
плавном пуске
для одного и
того же двигателя
графически
представлено
на рисунке 5
.
Противо-Э.Д.С.
определяется
умножением
угловой скорости
на поток в блоке
“15”. Сравнение
угловых скоростей
и токов якоря
при прямом и
плавном пуске
для одного и
того же двигателя
графически
представлено
на рисунке 5
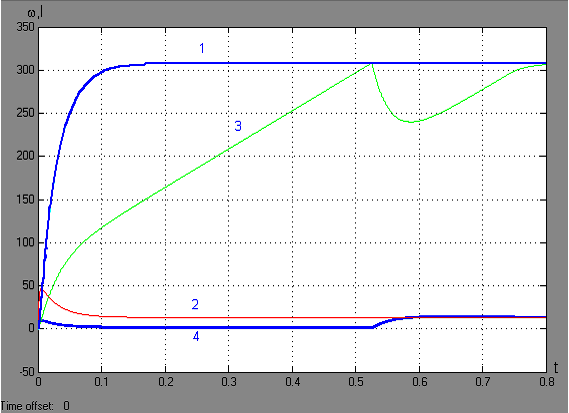
Рисунок 5 Ток и скорость при разных пусках
где кривая “1” - график изменения угловой скорости от времени при прямом пуске;
кривая “2” - график изменения тока якоря от времени при прямом пуске;
кривая “3” - график изменения угловой скорости от времени при плавном пуске;
кривая “4” - график изменения тока от времени при плавном пуске;
Время пуска можно увеличивать или уменьшать, изменяя соответствующим образом значение коэффициента блока “3”.
ВЫВОД
В ходе выполнения курсового проекта была произведена оценка эффективности использования широтно-импульсных преобразователей для промышленности и других отраслей народного хозяйства, а также возможность применения ШИП для плавного пуска двигателя.
В процессе работы были разработаны принципиальная, функциональная схемы проектируемого стенда, а также разработана и смонтирована система управления силовым транзистором на базе микроконтроллера PIC 16F 877. Рассчитаны и выбраны силовые элементы цепи, рассчитана схема замещения, построены статические и энергетические характеристики, а также методом математического моделирования в пакете “Matlab” получена модель системы ШИП – ДПТ. На основании полученных динамических характеристик сделаны выводы относительно разности прямого и плавного пуска.