
Аналіз функціональних схем, основні елементи систем автоматичного регулювання підсилення
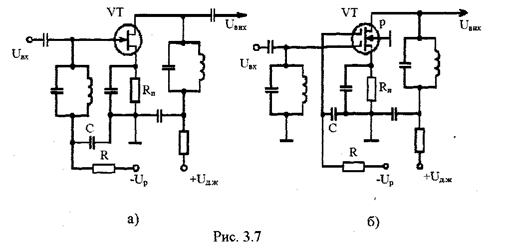
S залежить від напруги між затвором і джерелом (сіткою і катодом), причому в області напруг, де струми затвора або керуючої сітки відсутні. Це дозволяє подачею UР у ланцюг затвора або керуючої сітки регулювати посилення каскаду практично без витрати потужності від джерела напруги UР.Принципові схеми введення напруги UР стосовно до польових транзисторів приведені на рис. 7. У схемі рис. 7, а регулююча напруга вводиться в ланцюг затвора через СR - фільтр, що володіє малою постійної часу і призначений тільки для фільтрації складових несущої частоти сигналу. Напруга UР має негативний знак, тому що використовується транзистор з n-каналом, а збільшення Uр повинне приводити до зниження крутизни.
У схемі рис. 7, б напруга Uр вводиться в ланцюг другого затвора двухзатворного транзистора з р-каналом. В обох випадках при Uр - 0 положення робочої точки визначається автоматичним зсувом за рахунок опору Ru, (|Е0| = ІоRu). Це опір, створюючий зворотній зв'язок на постійному струмі, перешкоджає зміні крутизни S при впливі UР і тому іноді виключається зі схеми регульованого каскаду. У цьому випадку початкова напруга зсуву подається по ланцюгу напруги Uр (UР = Е0 при непрацюючій системі АРП).
|
|
|
Для підсилювачів на польових транзисторах можна вважати, що залежність коефіцієнта підсилення від напруги UР К0 (UР) цілком визначається залежністю S (Uр), тому що Ко = SRеК, а RеК = const.
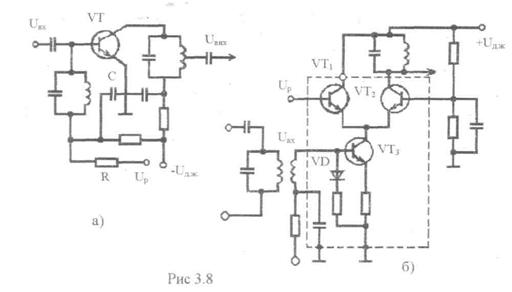
У схемах підсилювачів на біполярних транзисторах регулююча напруга звичайно вводиться в ланцюг бази (рис. 8. а,б Схеми підсилювачів на біполярних транзисторах) з такою полярністю, щоб його збільшення зменшувало колекторний струм Ік транзистора. Низькочастотна крутизна S0 біполярного транзистора, його вхідна g і вихідна g1 провідності, а також постійна часу t залежать від струму Ік так, як показано на рис. 9. Таким чином, при збільшенні напруги Uр буде зменшуватися струм Ік, а також крутизна S0, що і потрібно для здійснення АРП. Однак одночасно зменшуються вхідна і вихідна провідності, що приводить до росту підсилення попереднього і даного каскадів.
З розгляду цих ефектів випливає, що режимне регулювання біполярних транзисторів утруднене за рахунок впливу протилежно змінюючихся параметрів. Необхідно, щоб визначальною була зміна крутизни S0. Цій умові звичайно задовільняють транзистори з великим значенням β = h21 е (коефіцієнт передачі струму в схемі ОЕ) і малим опором бази rб. Регулююча здатність залежить від робочої частоти. На даній робочій частоті модуль крутизни
 ,
,
причому т змінюється так само, як і S0 (див.рис. 9).
Якщо  , то S >>S0, але при
, то S >>S0, але при  режимне
регулювання взагалі неможливе, тому що |S|
перестає залежати від Ік.
режимне
регулювання взагалі неможливе, тому що |S|
перестає залежати від Ік.
В основі регульованого підсилювача, зображеного на рис. 8, б, лежить часто використовувана в прийомній техніці диференціальна мікросхема в особливому включенні. Транзистори VТ3 і VТ2 утворюють каскодне з'єднання. Регулююча напруга подається на базу транзистора VТ1. При підвищенні напруги Uр транзистор VТ1 усе більше відмикається, його струм збільшується. Одночасно падає колекторний струм транзистора VТ2, тому що сума цих струмів дорівнює току транзистора VТ3 і практично постійна. Таким чином, регулювання підсилення відбувається за рахунок непрямого впливу напруги Uр на струм і крутизну транзистора VT2 завдяки перерозподілові струму транзистора VТ3, між транзисторами VТ1 ,VТ
Зі сказаного випливає, що на підставі залежностей (звичайно експериментальних), зображених на рис. 9, можна побудувати залежність K0(Ik)=S(Ik)Rek(Ik), а потім перерахувати зміни колекторного струму Ік у зміни регулюючої напруги Uр і одержати залежність К0 (Uр). Діапазон зміни коефіцієнта підсилення одного каскаду при режимному регулюванні не може перевищувати деякої межі, обумовленої просочуванням сигналу через майже закритий транзистор (паразитні ємності) і припустимим максимальним струмом через нього. Звичайно не вдається одержати зміни посилення на один каскад більш ніж у 60…80 разів, а з урахуванням припустимих нелінійних перекручувань що обгинає — у 15… 20 разів.
|
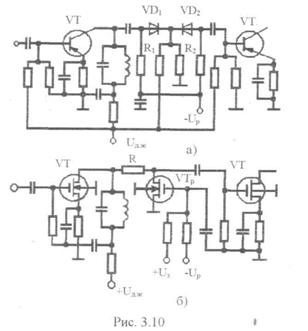
На рис. 10. приведено приклади керованих атенюаторів, які використовуються як регулюємі елементи систем АРП. На рис. 3.10, а зображена схема двухланкового діодного аттенюатора. Діоди VD1 і VD2 при відсутності напруги UР максимально відімкнуті від'ємною напругою, що знімається з дільника R1R При цьому коефіцієнт передачі максимальний, тому що внутрішній опір діодів мінімальний. В міру збільшення напруги Uр діоди підзапираются, їхні опори збільшуються і коефіцієнт передачі падає. Відношення Kmax/Kmin може досягати 103 на не дуже високій робочій частоті. Варто враховувати, що при сильних сигналах діоди працюють в області великої кривизни їхніх характеристик і нелінійні перекручування можуть досягати неприпустимих значень. З урахуванням цього не рекомендується змінювати коефіцієнт передачі одного осередку аттенюатора більш ніж у 60… 70 разів. На рис. 3.10, б роль регульованого опору грає польовий транзистор VТР (R — опір, що гасить). Регульований польовий транзистор встановлюється в режим малої напруги на стоці і працює на ділянці вихідної характеристики, розташованої до крапки перегину. У цьому режимі польовий транзистор має внутрішній опір, що залежить від напруги на затворі.
При слабкому сигналі Uр = 0 і транзистор замкнений. Коефіцієнт передачі при цьому максимальний. По мірі збільшення сигналу підвищується напруга Uр (у даному випадку Uр < 0, тому що транзистор має р-канал) і транзистор відмикається, знижуючи свій внутрішній опір. Перепад опорів, що дається польовим транзистором з ізольованим затвором, може бути дуже великим (Rі ≈ 700 кОм + 500 Ом). Відношення Kmax/Kmin для однієї ланки може досягати 103 ÷ 3 · 103 при порівняно невеликих нелінійних перекручуваннях, тому що транзистор саме при великих сигналах працює в області найвищої лінійності характеристик. Це характерно для схем, у яких регульовані елементи стоять в паралельних гілках аттенюатора.
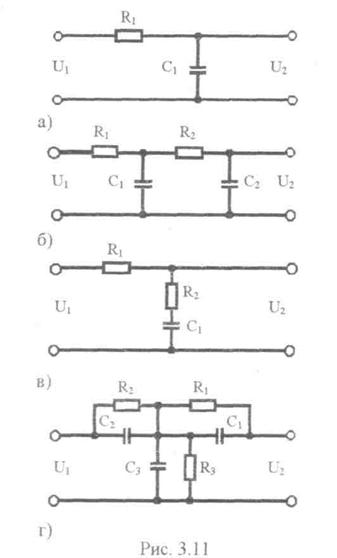
Перехідні процеси, стійкість, перекручування комплексної огинаючої сигналу при дії АРП багато в чому залежать від властивостей і виду фільтра, що входить у систему АРП. В основному використовується одноланковий RС-фільтр низьких частот (рис. 11 ,а). Він дає аперіодичний процес установлення підсилення і забезпечує стійкість системи, якщо є єдиною інерційною ланкою. Рідше застосовується двухланковий RС-фільтр низьких частот (рис. 11, б), що дає аперіодичний процес установлення тільки при визначеному співвідношенні постійних часу ланок і не забезпечує абсолютної стійкості системи АРП. Однак він може забезпечити велику швидкість перехідного процесу. Використовуються також одноланкові кореговані RС-фільтри низьких частот (рис. 11 ,б). Подібний фільтр по порівнянню з фільтром рис. 11, а дає менше фазовий зсув між напругами U2 і U1 при більшому коефіцієнті передачі в області вищих частот Ω→∞ [ при Kф→R2/(R1+R2) ]. В спеціальних випадках може застосовуватися фільтр у виді подвійного Т-образного моста (рис. 11, г), що має Кф = 0 на частоті балансу. Частоту балансу беруть рівній частоті корисної модуляції сигналу. Іноді роль фільтра, що визначає інерційність системи АРП, грає навантажувальний ланцюг детектора АРП, тобто використовується інерційний детектор.
У системах з безперервним сигналом регулююча напруга утвориться звичайно в результаті детектування коливань високої або проміжної частоти, тому що воно повинно бути пропорційно амплітуді несучої. Зокрема, як детектор АРП може використовуватися детектор каналу сигналу з додаванням ланцюгів, що дозволяють здійснити затримку. У системах з імпульсним сигналом, коли амплітуда вихідних відеоімпульсів пропорційна амплітуді радіоімпульсів на вході приймача (немає відеообмежників), можуть використовуватися відеоімпульсні детектори АРП, інерційні по відношенню до огинаючої відеоімпульсної послідовності або безінерційні.
В імпульсних системах знаходять також застосування ключові детектори і детектори зі скиданням (із примусовим розрядом ємності навантаження перед приходом кожного імпульсу). Ці детектори власне кажучи є розширниками імпульсів (від τи до Тп, де Тп — період повторення імпульсів) і їх не слід розглядати як інерційні ланки. Подібні детектори дозволяють підвищити стійкість системи АРП і домогтися великої глибини регулювання. Можуть застосовуватися і транзисторні детектори з обліком властивих їм недоліків, що дозволяють підвищити ефективність системи АРП без спеціальних підсилювачів [9].
|
|
|
|
|
|
|
|
|
|
|
|

У системах АРП звичайно використовуються підсилювачі постійної напроти (ППН). Вони мають верхню граничну частоту Fв<<F м де Fм — частота модуляції, і тому можуть мати високий коефіцієнт підсилення. Живлення ППН повинне здійснюватися таким чином, щоб була регулююча напруга необхідної полярності. Вихідний опір ППН бажано мати якомога меншим (для виключення додаткової інерційної ланки), тому іноді як вихідний каскад ППН використовують еміттерний повторювач або каскад із глибоким негативним зворотним зв'язком по напрузі [9].
2. Методика розрахунку зворотньої системи АРП
Система АРП зворотнього регулювання представляє собою не лінійну систему автоматичного регулювання. Процеси в такій системі описуються нелінійними диференційними рівняннями. Рішення цього рівняння дуже громіздке та важке, але воно суттєво спрощується при лінійній і експонціальній апроксимації регулюючої характеристики. РХ Близька до лінійній РХ властива регулюємим каскадам на польових і біполярних транзисторах, а також багатьом потенціометричним регуляторам властивих РХ, близько до експоненціальним[15].
При лінійній апроксимації РХ змінючим в процесі АРП коефіцієнт підсилення (передачі)
 , (2)
, (2)
де  –
коефіцієнт підсилення РП при управляючим напругою
–
коефіцієнт підсилення РП при управляючим напругою  ;
;
 -
значення
-
значення  , при
короткій
, при
короткій  вертається
в нуль.
вертається
в нуль.
В реальних схемах глубина регулювання обмежена, тому не
бува рівним нулю. Робоча ділянка характеристики  розташовується
віще осі напруги . Зверху він обмежений найбільшим підсиленням (
розташовується
віще осі напруги . Зверху він обмежений найбільшим підсиленням ( .
.
Ампітудна характеристика пристроїв з АРП. Амплітуда вихідної напруги підсилювача с лінійною РХ
 . (3)
. (3)
При  асимптотично
прямує до
асимптотично
прямує до  при
незатриманій АРП і до
при
незатриманій АРП і до  при
затриманій АРП. В цьому випадку
при
затриманій АРП. В цьому випадку  -
статичний коефіцієнт передачі ланцюга зворотньому зв’язку;
-
статичний коефіцієнт передачі ланцюга зворотньому зв’язку;  –коефіцієнт
підсилення підсилювача АРП;
–коефіцієнт
підсилення підсилювача АРП;  –
коефіцієнт передачі детектора АРП;
–
коефіцієнт передачі детектора АРП;  –
коефіцієнт передачі фільтру АРП;
–
коефіцієнт передачі фільтру АРП;  -
напруга затримки АРП.
-
напруга затримки АРП.
В