
Гиэфпт, г. Гатчина Ленинградской обл
| Вид материала | Документы |
- Б. П. Константинова,188300, г. Гатчина, Ленинградской обл, 128.33kb.
- Iv фестиваль молодых избирателей. С юмором о серьезном!, 9.97kb.
- Новости ->, 113.87kb.
- Новости ->, 114.42kb.
- Новости ->, 113.84kb.
- Новости ->, 113.03kb.
- Новости ->, 112.35kb.
- Новости ->, 113.22kb.
- Новости ->, 113.27kb.
- Новости ->, 113.93kb.
ВИЗУАЛИЗАЦИЯ И АНИМАЦИЯ ОСНОВНЫХ ТЕОРЕМ
ДИНАМИКИ В СРЕДЕ MATHCAD
Холявин И.И. (ГИЭФПТ, г.Гатчина Ленинградской обл., РФ)
Минаев А.Н. (СПбГЛТА, г. Санкт-Петербург, РФ)
In the real work the use of the programs is offered on a base MathCAD for implementation and verification of calculation-graphic works on theoretical mechanics, in particular, on the most basic division of theoretical mechanics - dynamics. For the considered model visualization and animation of charts and results of calculations are presented by creation of AVI -файлов. Application of package of MathCAD at the decision of tasks of theoretical mechanics allows substantially to modernize implementation of calculation-graphic tasks.
В настоящее время широкое распространение получили такие мощные математические пакеты, как MathCAD, Maple, MATLAB и другие. Эти аналитические и вычислительные пакеты позволяют сосредоточить внимание студентов на логике физического явления и математического метода, освобождая от необходимости освоения громоздких вычислительных процедур. Они также позволяют писать и многократно использовать простые, но эффективные программы. В частности, MathCAD является все более совершенствующей системой для работы с формулами, числами и графиками, может выполнять вычисления достаточно высокой степени сложности, по своему объёму допустимые на персональном компьютере. Кроме привычных численных расчётов, MathCAD способен делать аналитические преобразования, может решать большинство математических задач в виде формул либо численно. MathCAD позволяет записывать на экране компьютера формулы в их привычном виде, обладает широкими графическими возможностями.
В настоящей работе предлагается использование программ на базе MathCAD для выполнения и проверки расчетно-графических работ по теоретической механике, в частности, по самому основному разделу теоретической механики – динамике. В работе проводится визуализация и анимация механизма с применением методики, использованной в учебном пособии [1] для задач кинематики.
Ранее авторами было предложено использование программ на базе MathCAD для выполнения и проверки расчетно-графических работ по теоретической механике, в частности, по кинематике [1-3]. Конечно, само решение расчетно-графических работ для MathCAD не является особенно сложной задачей даже для задач динамики. Но при преподавании естественно–научных дисциплин основным является наглядность и анализ полученных результатов. Ведь применение пакета MathCAD при решении задач теоретической механики позволяет наглядно продемонстрировать полученные результаты в их динамике, при любом интересующем нас изменении параметров задачи в виде таблиц, графиков и т. п. Поэтому при обучении методов теоретической механики с использованием программ MathCAD основным становится показ основных теорем и формул в их действии. Для рассмотренных моделей представлена визуализация и анимация графиков и результатов вычислений путем создания AVI-файлов.
Применение пакета MathCAD при решении задач теоретической механики позволяет существенно модернизировать выполнение расчетно-графических заданий. Во-первых, можно рассмотреть большинство характерных механизмов для данной задачи. Во-вторых, наглядно продемонстрировать их действие. Рассмотрим это на примере задания Д10 – теоремы об изменении кинетической энергии. Аналогичные программы созданы и для других теорем динамики.
 |
| Рисунок 1. Определение скорости v1тела 1 |
Пусть механическая система, состоящая из трех тел массой тj, j=1,2,3, под действием сил тяжести приходит в движение из состояния покоя. Учитывая трение скольжения (коэффициент трения f) тела 1 и сопротивление качению (коэффициент трения качения δ) катка 3, пренебрегая другими силами сопротивления, определить скорость v1 тела 1 в тот момент, когда пройденный им путь станет равным s. При этом каток 2 считать неоднородным цилиндром с радиусом инерции i2x. На рис.1 система показана в начальном положении. Найти скорость v1 тела 1 в конечном положении. Дано:
т1=т2=1, т3=2, R2=R3=60 см, i2x=50 cм, α=30, β=45, f=0,2, δ=0,32 см, s=1,2 м, r2=
 R2.
R2.Определить v1=v1(s).
Применяя теорему об изменении кинетической энергии системы, получим
v1=1,32
 =1,45 м⁄с.
=1,45 м⁄с.Для этой задачи написана простая программа в MathCAD. Программа состоит из трех частей. В 1-й и 2-й частях вводятся начальные данные и определяется скорость v1 как функция перемещения s.
В третьей части программы проводится визуализация и анимация механизма (рис.2). Здесь на рисунке представлена визуализация механизма с указанием действующих сил и скорости тела 1.
Для анимации MathCAD имеет предназначенную для этого встроенную переменную FRAME. Переменная FRAME принимает целочисленные значения от 0 до n и должна быть включена в программу так, чтобы с изменением FRAME изменялся вид соответствующего графика, т.е. от переменной FRAME должны зависеть изображаемые компоненты этого графика. Значение переменной FRAME задается в диалоговом окне, открывающемся командой Tools►Animation. Перед созданием анимационного клипа следует убедиться, что в меню Calculate включен режим автоматических вычислений.
Сохраненный как AVI-файл клип можно вставить в документ MathCAD.
Литература
1. Бертяев В.Д. Теоретическая механика на базе MathCAD. Практикум. – СПб: БХВ-Петербург, 2005. – 752 с.
- Холявин И.И. Применение новых информационных технологий в преподавании общеобразовательных дисциплин. – Новые информационные технологии и системы. Труды VII международной научно-технической конференции. Пенза, 2006, стр. 260-262.
- Холявин И.И., Минаев А.Н. Новые информационные технологии в преподавании теоретической механики. – Высокие технологии, исследования, промышленность. Сборник трудов под редакцией А.П.Кудинова. С.-Пб., 2010, стр. 239-240.
- Холявин И.И., Минаев А.Н. Определение кинематических характеристик механизма манипулятора с его визуализацией и анимацией. – Леса России XXI в. Материалы III Международной научно-практической конференции. С.-Пб., 2010, стр. 31-35.
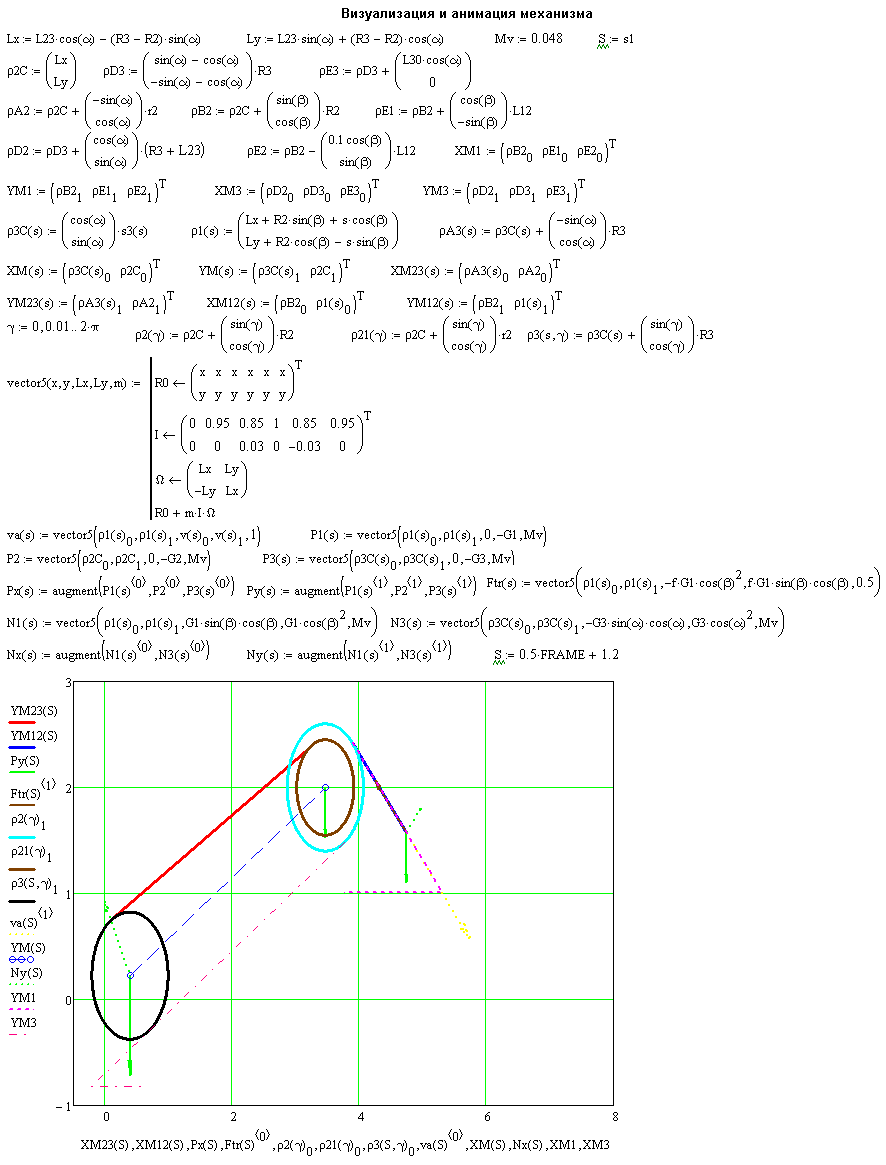 |
| Рисунок 2. Визуализация и анимация механизма |