
 Авторефераты по темам >>
Разные специальности - [часть 1] [часть 2]
Авторефераты по темам >>
Разные специальности - [часть 1] [часть 2]
Исследование нагруженности и прочности лопасти несущего винта вертолета на манёвренных и неустановившихся режимах
Автореферат кандидатской диссертации
На правах рукописи
АВЕРЬЯНОВ ИГОРЬ ОЛЕГОВИЧ
ИСССЛЕДОВАНИЕ НАГРУЖЕННОСТИ И ПРОЧНОСТИ ЛОПАСТИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА НА МЕНЁВРЕННЫХ И НЕУСТАНОВИВШИХСЯ РЕЖИМАХ
Специальность 05.07.03 - Прочность и тепловые режимы летательных аппаратов
Автореферат диссертацииа на соискание ученой степени кандидата
технических наук
Москва - 2012
Работа выполнена в МАТИ - Российском государственном технологическом университете им. К.Э.Циолковского на кафедре Прикладная и вычислительная механика.
Научный руководитель:а д.т.н, профессор, Агамиров Левон Владимирович.
Официальные оппоненты:
Шолом Анатолий Михайлович, д.т.н., профессор, МАТИ,
Братухина Анна Ивановна, к.т.н, доцент, МАИ.
Ведущая организация: ОАО Казанский вертолётный завод.
Защита состоитсяа л 24 маяа 2012 г. ва 13:00 часов
на заседании диссертационного совета Д212.110.07 в МАТИ - Российском государственном технологическом университете им. К.Э.Циолковского по адресу: 119111, г. Москва, ул. Оршанская, д.3.
С диссертацией можно ознакомиться в библиотеке
МАТИ-Российском государственном технологическом университете им. К.Э.Циолковского.
Автореферат разослан л_____ _________ 2012 г.
Ученый секретарь
диссертационного совет Чуфистов Владимир Алексеевич
Общая характеристика работы
Несущая система вертолетов является главным агрегатом, который обеспечивает существование вертолета как летательного аппарата, обладающего вертикальными взлётом и посадкой и не требующего специально подготовленных взлетно-посадочных площадок. Именно её безотказное функционирование обеспечивает безопасность полета вертолета во всех ожидаемых условиях эксплуатации, в том числе и на неустановившихся режимах, таких как взлет, разгон, посадка и маневры. Процесс проектирования и обеспечение заданных ресурсов требует наличия расчетных методик и прикладного математического обеспечения для определения нагрузок на агрегаты несущей системы и расчета её динамики, как на стадии проектирования, так и в процессе лётных и сертификационных испытаний.
Расчеты нагрузок на лопастях винтов вертолета на маневренных режимах является одной из важнейших задач проектирования несущих систем вертолета, поскольку высокие напряжения в конструкции лопасти на этих режимах существенно влияют на их ресурс. Для расчёта несущих систем, работающих на таких режимах, используют приближённые методы расчёта, что существенно снижает их надёжность. При расчёте установившихся режимов существующие методики также используют допущения, снижающие точность расчётов.
В связи с этим, задача разработки универсального метода расчёта лопастей несущих винтов вертолёта, позволяющего рассчитывать как установившиеся, так и неустановившиеся режимы полёта (манёвренные, переходные) и получать более точные, по сравнению с существующими методами, результаты, является весьма актуальной.
Целью данной работы является разработка обобщённой методики расчёта лопастей несущего винта вертолёта при сложном нагружении (с учётом кручения лопасти и изгиба в двух плоскостях) в условиях установившихся и неустановившихся режимов полёта, позволяющей существенно повысить точность расчётов.
Для достижения указанной цели решались следующие задачи:
- Разработка математической модели несущей системы вертолёта на основании уравнений деформаций лопасти несущего винта.
- Разработка метода решения задач на определение параметров собственного движения лопасти, возникающих при проектировании несущих систем вертолётов.
- Разработка метода решения задач вынужденных колебаний лопасти, позволяющих производить её расчёт при любых режимах полёта, в том числе и при неустановившихся.
- Получения решения для ряда практических задач, возникающих при проектировании несущих систем вертолётов, на основании разработанных алгоритмов расчёта.
Научная новизна
- Разработана математическая модель несущего винта на основании уравнений деформаций лопасти, отражающая поведение лопастей на установившихся и неустановившихся режимах полёта.
- Разработан алгоритм расчёта параметров собственного движения лопасти, позволяющий решать задачи с меняющимися во времени граничными условиями.
- Разработан алгоритм расчёта напряжённо деформированного состояния лопастей, работающих в условиях неустановившихся режимов, позволяющий рассчитывать опасные напряжения, возникающие в конструкции в каждый момент времени.
- Разработана методика расчёта характеристик несущего винта и его нагружения, с одновременным расчётом всех упругих лопастей, входящих в несущий винт.
Практическая значимость и реализация результатов
Разработанный метод расчёта лопастей несущих винтов вертолёта, позволяет определить величины напряжений и деформаций, возникающих в лопасти, работающей в условиях манёвренных и переходных полётных режимов, а также определять параметры собственного движения лопастей.
Достоверность результатов
Обоснованность научных положений и достоверность полученных результатов подтверждается использованием сертифицированных программных сред (Excel, Visual basic) при разработке алгоритма решения, применением аппарата высшей математики, теоретической механики и теории упругости. Полученные результаты сравнивались с решениями, получаемыми в сертифицированной программной среде MSC Patran/Nastran, с существующими точными решениями, с результатами экспериментальных исследований и решениями других авторов.
Апробация работы
Основные положения и результаты диссертационной работы опубликованы в статьях [1] - [4]. Результаты исследования докладывались и обсуждались на молодёжной научной конференции Гагаринские чтения (Москва, 2009 г).
Содержание работы
Диссертация состоит из введения, 4 глав и заключения, содержит 137 страниц текста, 93 рисунка, 14 таблиц, списка литературы из 53 наименований.
Во введении обосновываются актуальность и практическая значимость выполненной работы.
Первая глава посвящена исследованию состояния проблемы расчёта несущих систем вертолётов. Анализ трудов отечественных специалистов Лисса А.Ю, Некрасова А.В., Миля М.Л., Ивчина В.А., Михеева Р.А., Бравермана А.С., Баскина В.Э., Тищенко М.Н., Риза П.М., Пожалостина А.И, а также трудов зарубежных авторов позволил определить основные, используемые на практике, методы расчёта несущих систем вертолётов.
В качестве исходной системы уравнений, описывающей колебания лопасти, была выбрана система уравнений, разработанная А.Ю. Лиссом, до сих пор остающаяся одной из самых полных и позволяющей рассчитывать с высокой точностью нагрузки на несущую систему, включая шарнирные моменты и нагрузки на автомат перекоса.
При расчёте несущей системы вертолёта необходимо рассматривать её работу как на установившихся режимах (висение, горизонтальный полёт), так и на неустановившихся (манёвренные и переходные режимы).
Решением задачи расчёта нагрузок на лопастях при установившихся режимах полётаа занимались многие авторы. Для решения такой задачи часто используют приближённые методы расчёта, такие как метод Б.Г. Галёркина. При этом функция внешней нагрузки представляет собой периодическую функцию, меняющуюся с определённой частотой. Методика, предложенная А.Ю.Лиссом для расчёта нагруженности несущего винта вертолёта в условиях установившихся режимов, предполагает использование в расчёте осреднённой за оборот тяги. Таким образом, недостатками существующих методов расчёта являются принятые допущения и невозможность определения напряжённо-деформированного состоянии лопасти в рассматриваемый момент времени. В связи с тем обстоятельством, что большую часть эксплуатационного времени вертолёта приходится именно на установившиеся режимы полёта, получение более точных расчётных значений нагрузок в лопастях несущего винта позволит повысить надёжность несущей системы и более точно оценить её ресурс.
Расчеты нагрузок на лопастях винтов вертолета на маневренных режимах является одной из важнейших задач проектирования несущих систем вертолета, поскольку высокие напряжения в конструкции лопасти на этих режимах существенно влияют на прочность и ресурс. Большинство существующих методов расчета нагрузок в лопастях несущих винтов на маневренных режимах основываются на квазистатическом подходе, при котором считается, что в каждый момент времени режим является статическим, то есть скорость полета и угол атаки несущего винта постоянны, а ускорения отсутствуют. При этом динамика и деформацияа лопастей соответствует именно данному установившемуся режиму. Расчеты такого режима проводятся до установления деформации и махового движения лопасти вокруг шарниров.
Недостатком такого подхода является, то, что в реальной ситуации силы, действующие на лопасти, постоянно меняются, а наличие ускорений от движения вертолета приводит к возникновению дополнительных инерционных сил на лопастях, поэтому расчётные величины нагрузок на лопасти винта при квазистатическом подходе могут отличаться от эксплуатационных.
На основании анализа изученного материала
- установлено, что допущения, на которых основаны существующие методы расчёта лопастей несущих винтов вертолётов, применительно к анализу установившихся режимов полёта, не позволяют получать реальные значения деформаций лопасти в рассматриваемые моменты времени, что приводит к снижению точности расчётов.
- установлено, что существующие методы расчёта неустановившихся режимов полёта не учитывают реальную динамику лопасти, что делает анализ неточным.
- сформулированы цели и задачи исследования.
Создание обобщённой методики расчёта лопастей несущих винтов для установившихся и неустановившихся режимов является целью данной диссертационной работы.
Вторая глава посвящена разработке методики решения уравнений деформаций лопасти методом прямого интегрирования [1, 2]. Для этого используется метод конечных разностей, суть которого заключается в представлении исследуемого дифференциального уравнения в виде разностной схемы и сведения его к линейному уравнению. В общем виде уравнения деформации лопасти записываются в виде системы уравнений (1):
 (1)
(1)
где Аi, Вi являются линейными интегро-дифференциальными операторами над функциями x(r,t),а y(r,t),а и q (r,t).
В системе уравнений (1) индексом 1 обозначено уравнение, относящееся к деформации в плоскости вращения, индексом 2 - к деформации в плоскости тяги, и индексом 3 - кручение лопасти. Формулы, раскрывающие значения Аi, Вi, и Fi, с учетом членов первого порядка малости, представлены ниже. Величины Аi, Вi зависят только от неизвестных величин деформации лопасти x, y, q и их производных по радиусу, а инерционные члены, выражения для которых содержит первые производные по времени, и некоторые инерционные и упругие члены квадратичные относительно деформаций, которые не являются пренебрежимо малыми, включены в выражения для Fi. К ним также относятся и внешние аэродинамические нагрузки. Преобразуя операторы уравнения (1) стандартными преобразования частных производных, согласно теории конечных разностей, заменив интегралы соответствующими суммами, в настоящей работе получена следующая расчетная система уравнений:
 а (2)
а (2)
 аа (3)
аа (3)
 (4)
(4)
Для выполнения расчетов необходимо задать граничные условия. Для различных случаев закрепления лопастей на втулке несущего винта комлевые граничные условия будут различны. Для конца лопастей, граничные условия будут одинаковы.
В настоящей работе сформулированы следующие граничные условия:
- Выражения для граничных условий на конце лопасти будут определяться в соответствие с рассматриваемой степенью свободы следующим образом:
 ;а в виде разностных уравнений:а
;а в виде разностных уравнений:а  . а(5)
. а(5)
где N - число расчетных сечений.
- Граничные условия в комле лопастей будут зависеть от характера подвески лопастей к втулке. Обычно имеются горизонтальный, вертикальный и осевой шарниры. Осевой шарнир, как правило, является шарниром с упругостью, которая определяется податливостью системы управления вертолета. Для этого случая шарнирной лопасти граничные условия в комле будут иметь вид:
 ;а в виде разностных уравнений:а
;а в виде разностных уравнений:а  а(6)
а(6)
- Граничные условия в комле лопастей для жесткой заделки будут выглядеть следующим образом:
 ; в виде разностных уравнений;а
; в виде разностных уравнений;а  .а (7)
.а (7)
Величины х, y и q с индексом N+1 и 0 являются виртуальными, необходимыми для обеспечения граничных условий в соответствии с теорией численного решения уравнений с частными производными.
Таким образом, подставив граничные условия (5,6,7) в уравнения (2,3,4) и имея неизвестными значения х+,i, y+,i и q+,i получим систему линейных уравнений для определения деформации сечения лопасти по трем степеням свободы. Индекс + означает слой неизвестных параметров деформации сечения лопасти в разностной сетке и соответствует времени t+Dt, индекс 0 - соответствует слою параметров в настоящий момент времени t, а индекс - соответствует слою параметров на предыдущем расчетном шаге по времени t-Dt.
Предложенный метод решения уравнений колебания лопасти позволяет определить НДС в каждом сечении лопасти в каждый момент времени, что делает возможным расчёт всех режимов работы несущего винта, в т.ч. и манёвренных. На основе предложенной методики решения уравнений деформаций лопасти был разработан алгоритм расчёта, реализованный с помощью языка Visual Basic в среде Excel.
Третья глава посвящена обоснованию правильности разработанного алгоритма расчёта применительно к задачам определения собственных характеристик лопастей и расчёту деформаций лопасти, работающей в условиях установившихся режимов полёта. Для этого решается ряд тестовых задач, решения которых сопоставляются с известными точными решениями, решениями, полученными в сертифицированных конечно-элементных пакетах и решениями, полученными другими авторами.
В соответствии с принятым методом расчёта расположение рассматриваемых сечений лопасти бралось эквидистантным. В задачах расчёта лопастей рассматривается лопасть вертолёта Ми-8. Упруго-массовые характеристики лопасти пересчитывались исходя из известных характеристик с помощью линейной интерполяции.
3.1 Исследование собственных характеристик системы
3.1.1 Колебания невращающейся консольной балки.
В данной задаче рассматривалась консольная балка постоянного сечения, совершающая свободные колебания. Полученные значения сравнивались с точными решениями. Результаты расчёта и графики собственных форм и частот приведены ниже.
Рис. 1. Деформации лопасти для случая консольной балки |
Рис. 2 . Собственные формы и частоты для случая консольной балки |

График, показанный на рис.1 показывает, что полученное решение является устойчивым во времени. Сравнение полученных результатов с точным решением приведено в табл.1.
- Колебания невращающейся лопасти
В данном случае рассматривается свободные изгибные колебание жёстко закреплённой лопасти вертолёта Ми-8 в двух плоскостях. Полученные результаты сравниваются с результатами, полученными в конечно-элементном пакете MSC Nastran.
Сравнение результатов для первого тона аотображено в табл.1.
- Колебания вращающейся лопасти
В данной задаче рассматриваются колебания вращающейся лопасти в плоскости тяги. Результаты расчёта сравниваются с результатами, полученными А.В. Некрасовым. Использовались упруго-массовые характеристики лопасти, рассмотренные А.В. Некрасовым, которые были пересчитаны согласно условию их эквидистантности. Результаты расчёта приведены в табл.1.
- Исследование совместных изгибно-крутильных колебаний
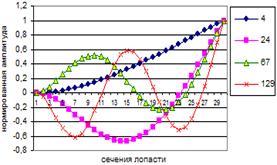
Рассматривается задача совместных свободных изгибно-крутильных в трёх плоскостях колебаний вращающейся шарнирно закреплённой лопасти. Полученные результаты сравниваются с существующим решением (см. табл.1). Графики соответствующих собственных форм и частот приведены ниже.
|
|
Рис. 5. График собственных форм и частот лопасти при совместных колебаниях. Плоскость кручения |
|
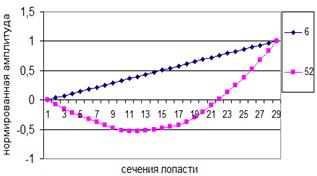 Рис. 3. График собственных форм и частот лопасти при совместных колебаниях. Плоскость вращения
Рис. 3. График собственных форм и частот лопасти при совместных колебаниях. Плоскость вращения  Рис. 4. График собственных форм и частот лопасти при совместных колебаниях. Плоскость тяги
Рис. 4. График собственных форм и частот лопасти при совместных колебаниях. Плоскость тяги
№ тона |
Сравниваемое решение, 1/сек |
Полученное решение, 1/сек |
Относительное отклонение, % |
3.1.1 Колебания невращающейся консольной балки |
|||
1 |
3.94 |
4.0 |
0.02 |
2 |
24.68 |
24.0 |
0.03 |
3 |
69.10 |
67.0 |
0.03 |
4 |
135.44 |
129.0 |
0.05 |
3.1.2 Колебания невращающейся лопасти |
|||
1й тон. Плоскость тяги |
3.91 |
4.0 |
0.02 |
1й тон. Плоскость вращения |
10.13 |
10.0 |
0.01 |
3.1.3 Колебания вращающейся лопасти |
|||
1 |
21.22 |
21.0 |
0.01 |
2 |
54.50 |
54.0 |
0.01 |
3 |
93.30 |
92.0 |
0.01 |
4 |
147.42 |
142.0 |
0.04 |
3.1.4 Совместные изгибно-крутильные колебания |
|||
Плоскость тяги |
|||
2 |
20.41 |
20.0 |
0.02 |
3 |
53.45 |
52.0 |
0.03 |
5 |
93.39 |
87.0 |
0.07 |
Плоскость вращения |
|||
1 |
5.51 |
6.0 |
0.08 |
3 |
53.45 |
52.0 |
0.05 |
Плоскость кручения |
|||
6 |
152.56 |
153.0 |
0.01 |
7 |
160.10 |
157.0 |
0.02 |
Таблица 1 . Тестовые задачи. Сравнения с существующими решениями
Как видно из табл.1, полученные по разрабатываемой методике значения частот, соответствуют сравниваемым частотам. При проведении спектрального анализа использовался шаг по частоте равный 1 рад/сек. Незначительное расхождение результатов по высоким тонам объясняется использованием интерполяционных упруго-массовых характеристик в сечениях рассчитываемой модели лопасти. Проведённые исследования показали, что при увеличении времени расчёта решение стремится к точному, что соответствует поведению реальной модели.
3.2 Исследование вынужденных колебаний системы
3.2.1 Установившийся режим горизонтальный полёт
В данном разделе полученное для задачи решение сопоставляется с существующим решением. В связи с этим все рассматриваемые характеристики режима соответствуют характеристикам существующего решения: рассматривается пятилопастной несущий винт вертолёта Ми-8, скорость набегающего потока 230 км/ч, угол наклона винта -3.40, угловая скорость вращения винта 20,106 рад/сек. Упруго-массовые характеристики лопасти брались интерполированными от существующих замеров, исходя из условия эквидистантности сечений, в соответствии с используемым методом конечных разностей. В начальном положении лопасть находилась в горизонтальном положении, значение тяги несущего винта равно нулю. Результаты расчёта приведены ниже.
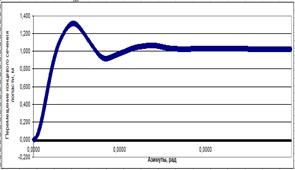
Один оборот винта аАзимут, рад а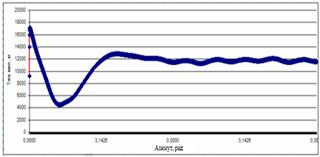 Рис. 6. Значение тяги винта. Установившийся режим |
Азимут, рад а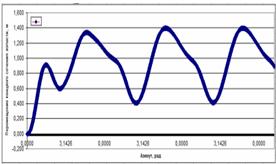 Рис. 7. Деформации сечения лопасти в плоскости тяги. Установившийся режим |
Азимут, рад а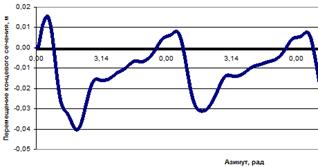 Рис. 8. Перемещение сечения лопасти в плоскости кручения. Установившийся режим Рис. 8. Перемещение сечения лопасти в плоскости кручения. Установившийся режим
|
Азимут, рад а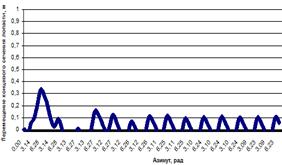 Рис. 9. Перемещение сечения лопасти в плоскости вращения. Установившийся режим |
Как видно их приведённых графиков для горизонтального и осевого шарниров режим устанавливается после 2-го оборота несущего винта. Для вертикального шарнира движение лопасти устанавливается после 12-го оборота винта. Полученное среднее значение тяги несущего винта за оборот составляет 11698 кг. Значение тяги в сравниваемой работе равно 11331 кг. Разница между результатами составляет 3%. Из рис.6 видно, что число волн на графике тяги винта за один его оборот равно пяти. Это обстоятельство объясняется наложением маховых движений лопастей в плоскости тяги по их нулевым тонам за один оборот пяти-лопастного несущего винта.
На рис.10-15 сравниваются результаты расчёта, выполненного по разработанной методике, с результатами, полученными по существующей методике. Показаны распределения постоянных и переменных значений моментов по радиусу лопасти.
|
|
|
|
Рис. 14. Постоянные моменты в плоскости кручения лопасти |
Рис. 15. Переменные моменты в плоскости кручения лопасти |
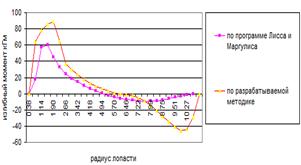 Рис. 10. Постоянные моменты в плоскости тяги лопасти
Рис. 10. Постоянные моменты в плоскости тяги лопасти 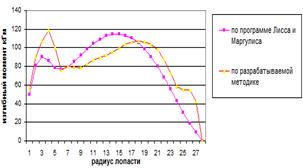 Рис. 11. Переменные момент в плоскости тяги лопасти
Рис. 11. Переменные момент в плоскости тяги лопасти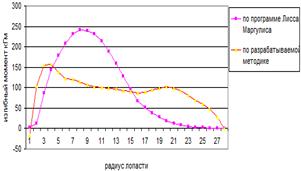 Рис. 12. Постоянные моменты в плоскости вращения лопасти
Рис. 12. Постоянные моменты в плоскости вращения лопасти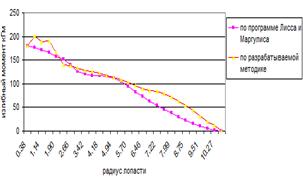 Рис. 13. Переменные моменты в плоскости ращения лопасти
Рис. 13. Переменные моменты в плоскости ращения лопасти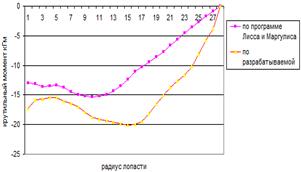

Из графиков видно соответствие сравниваемых результатов. Результаты исследования показали, что разработанный алгоритм расчёта позволяет определить напряжённо деформированное состояние в каждом сечении лопасти и значение тяги несущего винта вертолёта в каждый рассматриваемый момент времени. Данное обстоятельство позволяет отказаться от применения осреднённых за оборот винта характеристик, как это делалось в сравниваемой задаче, что повышает точность расчётов.
3.2.2 Установившийся режим висение
Рассматривается задача установившегося режима полёта висение пятилопастного вертолёта Ми-8. В связи с отсутствием готового решения для этой задачи проводится качественная оценка решения. Для примера характеристики лопастей берутся теми же, что и для задачи горизонтальный полёт, описанной выше: скорость набегающего потока 0 км/ч, угол наклона винта 00, угловая скорость вращения винта 20,106 рад/сек, углы наклона тарелки автомата перекоса 00. В начальном положении лопасть находилась в горизонтальном положении, значение тяги несущего винта равно нулю. Результаты расчёта приведены ниже.
Азимут, рад а Рис. 16. Значение тяги несущего винта. Режим висесние |
Азимут, рад аРис. 17 . Деформации лопасти в плоскости тяги. Установившийся режим висение |
Азимут, рад а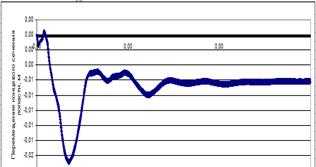 Рис. 18. Деформации лопасти в плоскости кручения. Установившийся режим висение |
Азимут, рад а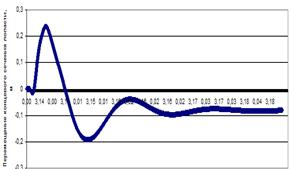 Рис. 19. Деформации лопасти в плоскости вращения. Установившийся режим висение |
Из приведённых графиков видно, что деформации лопасти в плоскостях тяги и кручения, а также тяга винта принимают постоянные значения уже после второго оборота несущего винта, а деформации лопасти в плоскости вращения - после 10 оборота. Полученное решение соответствует существующим теориям и результатам лётных испытаний.
По результатам рассмотренных задач установившихся режимов можно заключить, что разработанная методика расчёта лопастей применима для расчёта установившихся режимов полёта.
Четвёртая глава посвящена апробации разработанного алгоритма расчёта к некоторым задачам проектирования несущих винтов вертолётов.
Это явление может возникнуть на стоянке, когда под воздействием порыва ветра незакрепленная лопасть поднимается вверх, а затем падает, когда порыв ветра заканчивается (данный случай описан в II-2 НЛГВ). Падение лопасти сопровождается, ее колебательным движением, параметры которого могут меняться в зависимости от высоты подъема лопасти вследствие порыва ветра и её упруго-массовых характеристик. Для решения данной задачи в уравнения деформаций лопастей был введён гравитационный член:
|
(15) |

 В связи с отсутствием экспериментальных данных для лопасти вертолёта Ми-8, полученное решение для данной задачи сопоставлялось с экспериментальными данными, взятыми для другой лопасти (композитной, с отличающимися упруго-массовыми характеристиками), и показало качественное соответствие результатов [3].
В связи с отсутствием экспериментальных данных для лопасти вертолёта Ми-8, полученное решение для данной задачи сопоставлялось с экспериментальными данными, взятыми для другой лопасти (композитной, с отличающимися упруго-массовыми характеристиками), и показало качественное соответствие результатов [3].
Рис. 20. Падение шарнирно закреплённой лопасти на ограничитель свеса с учётом аэродинамического демпфирования
На рис.20 показано сравнение результатов, полученных по разработанной методике (график изменения изгибного момента в лонжероне лопасти), с экспериментальными данными (I канал - изгибные напряжения в лонжероне лопасти). В виду пропорциональности сравниваемых величин проводится качественное сравнение.
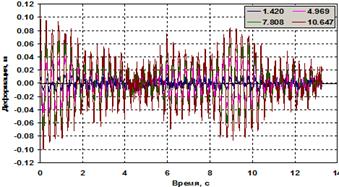
Система SLES (Stall Local Elimination System - система подавления локального срыва) была предложена на ОАО МВЗ им. М.Л. Миля Н.С. Павленко и В.М. Пчелкиным в 1991г и служит для повышения аэродинамических характеристик несущей системы вертолёта. В основе метода лежит защемление лопасти в горизонтальном шарнире в зависимости от ее азимутального положения. Расчет такой системы представляет собой значительную сложность, так как граничные условия на подвеску лопасти к втулке меняются в течение одного оборота лопасти. На рис.21-22 показаны некоторые результаты проведенного по разработанной методике расчёта.
a)
аРис. 21. Деформации лопасти для случая защемления лопастей в диапазоне 2250-3150
б)
а
в)
а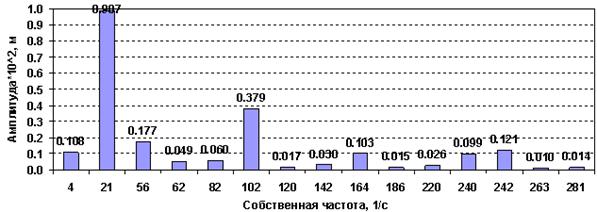
Рис. 22. Вклад частот в колебания лопасти для а) - шарнирно закреплённой лопасти; б) - жёстко закреплённой лопасти; в) - лопасти с концепцией SLES
Из приведенных графиков следует, что применение концепции SLES приводит к возникновению широкого спектра частот, которых не было ни в случае шарнирного, ни в случае жёсткого крепления лопасти к втулке. Результаты расчёта несущей системы с данной концепцией крепления лопастей с помощью разработанного алгоритма [3] позволили выявить проблемные места данной системы, связанные с возникновением резонансов в лопастях, а также увеличением нагрузок и возникновением опасных переменных изгибающих моментов в лопастях.
Решение данного класса задач показало, что разработанный алгоритм расчёта применим для решения задач собственных характеристик лопастей со специфическими особенностями несущей системы.
Для предварительных оценок нагрузок на лопасти несущего винта был выбран режим горка [4], поскольку выполнение этого маневра на вертолете с высокими перегрузками приводит к значительным напряжениям в лопастях и росту нагрузок в системе управления.
Ставится задача сравнения нагрузок на лопасти, рассчитанных методом прямого интегрирования и квазистатическим методом, используя для расчетов одну и ту же программу, разработанную автором данной работы, для обеспечения корректного сравнения полученных результатов. Для расчетов динамического режима используется непосредственное прямое интегрирование всего режима полета, а для квазистатического расчета - рассматриваются отдельные моменты времени, которые считаются статическими режимами. Для последних, параметры полета и отклонения органов управления принимаются постоянными по времени. Расчет в этом случае ведется до сходимости махового движения и деформации лопасти за два последних расчетных оборота.
В качестве исходных данных рассматриваются параметры полета, полученные по результатам летных испытаний вертолета Ми-28, поскольку отсутствовали данные для вертолета Ми-8. Хотя конструкции вертолетов различаются, однако приращения управления и параметров полета в процессе выполнения режима можно применить для вычислительного эксперимента с вертолетом Ми-8.
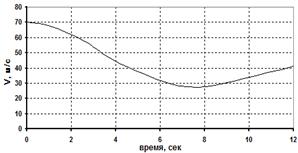
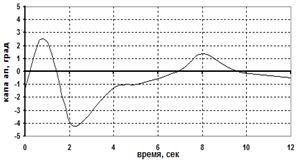
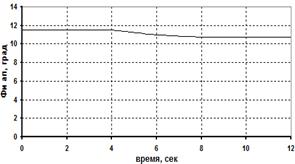
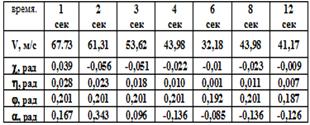
Манёвр начинается из исходного, сбалансированного режима горизонтального полета, с начальной поступательной скоростью 250 км/ч. Переходный режим вертолета завершается новым установившимся режимом при скорости полета 145 км/ч. На рис.23 представлены графики приборной скорости полета, угла атаки и параметров продольного, поперечногоа управления и общего шага по времени полета, в таблице указаны расчетные параметры для квазистатических режимов.
|
|
|
|

|
|
Рис. 23 . Режим горка. Изменение характеристик режима (продолжение) |
|
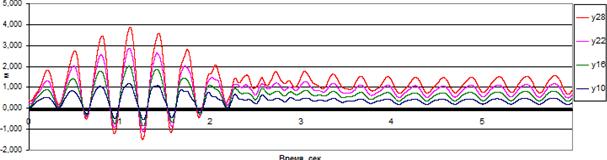
На рис.24 показан график изменения тяги несущего винта за время выполнения манёвра. На рис.25 показаны амплитудные значения деформаций сечений для того же интервала времени.
Время, сек аТяга винта, Кг а Рис. 24 . Значение тяги несущего винта. Режим Горка |
Рис. 25 . Деформации сечений лопасти в плоскости тяги винта. Манёвр горка |
Из графика видно, что максимальное среднее значение тяги винта достигает величины 19493 кг (0,85 с), что соответствует вертикальной перегрузке
ny19493 / 10535 = 1.85
Эта величина соответствует перегрузке, полученной в летных испытаниях для режима, который был принят для исходных данных. Полученная величина перегрузки достаточно высока для вертолета Ми-8 в нормальной эксплуатации, однако в критических ситуациях или при выполнении боевых задач, такая перегрузка вполне реальна.
На рис.25 показан график вертикального перемещения (в плоскости тяги винта) четырех отдельных сечений лопасти, расположенных на радиусах 10.65 м, 8.35 м, 6.03 м и 3.8 м в процессе выполнения маневра. Видно, что перемещение сечений лопасти происходит с частотой, равной частоте вращения несущего винта, при этом амплитуда колебаний лопасти существенно возрастает в интервале достижения максимальной перегрузки при маневре. Максимальная амплитуда вертикальных перемещений, как видно из графика на рис.25, достигается, как это и положено, на конце лопасти, на расчетном радиусе 10.5 м. Если на конечном, установившемся режиме полуразмах вертикального перемещения конца лопасти достигает величины 0.5 м, то максимальная величина полуразмаха в процессе выполнения маневра составляет ~2.25 м.
Далее были выполнены расчеты квазистационарных режимов в соответствие с данными, представленными на рис.23. Таблица 2 содержит сравнительные данные для двух подходов.
Время |
0 сек |
1 сек |
2 сек |
3 сек |
4 сек |
6 сек |
8 сек |
12 сек |
|
Тяга винта, кг |
Метод прямого интегрирования. |
10540 |
16521 |
15484 |
16722 |
13107 |
13819 |
14929 |
12814 |
Квазистатический метод. |
10535 |
17157 |
16543 |
16503 |
13110 |
13815 |
14799 |
12809 |
|
Таблица 2 . Тяга винта. Сравнение методов квазистатического анализа и прямого интегрирования
Графики нагружения лопасти для двух расчетных методов приведены ниже. Переменная составляющая моментов для расчета методом прямого интегрирования определялась в диапазоне времени одного оборота винта, середина которого приходилась на рассматриваемый момент времени. Ниже на графиках представлено распределение постоянной и переменной части моментов по радиусу лопасти в момент времени равный 2 секундам для двух рассматриваемых методов, т.к. именно в этот момент времени различия между сравниваемыми подходами максимальны.
Рис. 26. Распределение изгибных моментов по радиусу лопасти в плоскости тяги. Постоянная часть |
Рис. 27. Распределение изгибных моментов по радиусу лопасти в плоскости тяги. Переменная часть |
Рис. 28. Распределение изгибных моментов по радиусу лопасти в плоскости вращения. Постоянная часть |
Рис. 29. Распределение изгибных моментов по радиусу лопасти в плоскости вращения. Переменная часть |
Рис. 30. Распределение моментов по радиусу лопасти в плоскости кручения. Постоянная часть |
Рис. 31. Распределение моментов по радиусу лопасти в плоскости кручения. Переменная часть |
Аналогичные графики были получены и для остальных расчетных режимов. За исключением начального и конечного участков полета, на которых и переменная и постоянная часть изгибающих и крутильных моментов практически одинакова, метод прямого интегрирования давал более высокий уровень нагружения лопасти несущего винта. На рис.32 показано распределение максимальных эквивалентных изгибных напряжений по радиусу лопасти, возникающих во время выполнения рассматриваемого манёвра.
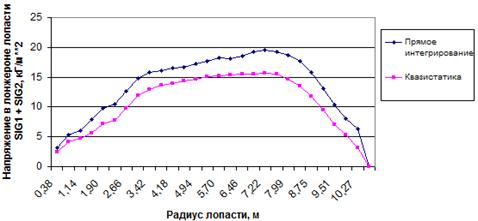
Рис. 32. Распределение эквивалентных изгибных напряжений по радиусу лопасти
Из графика напряжений видно, что квазистатический подход для расчета маневренных и неустановившихся режимов дает заниженные значения напряжений в лопасти. Расчет напряжений для данного маневра показал, что занижение результатов при квазистатическом методе может составлять около 25%.
Выводы:
В соответствии с поставленными целями и задачами в рамках диссертационной работы было выполнено следующее:
- На основании уравнений деформаций лопасти разработана математическая модель несущей системы вертолёта, учитывающая одновременную работу всех лопастей несущего винта, с учётом деформаций лопасти в плоскостях тяги, вращения и кручения, и отражающая реальное поведение лопастей при установившихся и неустановившихся режимах полёта.
- Разработан алгоритм расчёта параметров собственного движения лопасти, позволяющий решать задачи с различными граничными условиями, в том числе и с меняющимися в течение оборота несущего винта.
- Проведены исследования специфических задач проектирования несущего винта вертолёта на определение параметров собственного движения лопасти, на примере конструкций несущей системы SLES и случая падения лопасти на ограничитель свеса (описан в II-2 НГЛВ), которые показали, что достоверное решение подобных задач может быть получено только с применением метода прямого интегрирования уравнений деформаций лопасти. По результатам исследований можно заключить, что разработанный алгоритм расчёта параметров собственного движения лопасти позволяет получать достоверные результаты.
- Разработан алгоритм расчёта напряжённо деформируемого состояния лопасти, работающей в условиях как установившихся, так и неустановившихся режимов полёта, позволяющий рассчитывать нагруженность и величины напряжений в лопасти в каждый момент времени.
- Проведены исследования задач работы несущего винта вертолёта в условиях установившихся режимов на примере режимов горизонтальный полёт и висение, которые показали соответствие результатов, полученных по разработанной методике, существующим решениям других авторов, а также существующим теориям и результатам экспериментов. По результатам исследований можно заключить, что разработанный алгоритм расчёта напряжённо деформируемого состояния лопасти позволяет получать достоверные результаты и повысить точность расчётов.
- Проведено исследование задачи работы несущего винта вертолёта в условиях неустановившегося режима на примере манёвренного режима горка, которое показало соответствие полученных результатов экспериментальным данным. Проведённое сопоставление с квазистатическим методом решения данной задачи показало, что квазистатический метод даёт занижение результатов при быстро меняющихся характеристиках режима полёта. Это позволяет заключить, что разработанная методика расчёта нагруженности и прочности лопастей несущих винтов позволяет существенно повысить точность расчётов.
Основное содержание диссертации опубликовано в следующих работах:
- Аверьянов И.О., Агамиров Л.В., Ивчин В.А. Исследование конечно-разностной схемы для расчёта прочности несущих винтов летательных аппаратов для неустановившихся и маневренных режимов, Научно-техническая конференция Гагаринские чтения, 2010
- Аверьянов И.О., Ивчин В.А. Разработка метода расчёта деформаций упругой лопасти несущего винта вертолёта в плоскостях тяги, вращения и кручения, путём прямого интегрирования, Научный вестник МГТУ ГА, 2011
- Аверьянов И.О., Ивчин В.А. Исследование динамики собственного движения лопасти несущего винта вертолёта с применением метода прямого интегрирования, Научный вестник МГТУ ГА, 2011
- Аверьянов И.О., Ивчин В.А. Исследование нагрузок на упругой лопасти несущего винта при выполнении маневра горка методом прямого интегрирования, Научный вестник МГТУ ГА, 2012
Авторефераты по темам >>
Разные специальности - [часть 1] [часть 2]