
 Авторефераты по темам >>
Разные специальности - [часть 1] [часть 2]
Авторефераты по темам >>
Разные специальности - [часть 1] [часть 2]
ИССЛЕДОВАНИЕ ДИНАМИКИ УПРАВЛЯЕМОГО ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА СЦЕПЛЕНИЯ АВТОМОБИЛЯ
Автореферат кандидатской диссертации
На правах рукописи
емельянов иван павлович
ИССЛЕДОВАНИЕ ДИНАМИКИ УПРАВЛЯЕМОГО ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА
аСЦЕПЛЕНИЯ АВТОМОБИЛЯ
Специальность 01.02.06 - Динамика, прочность машин, приборов и аппаратуры
Автореферат
диссертации на соискание ученой степени
кандидата технических наук
Курск 2007
Работа выполнена в Курском государственном техническом университете на кафедре теоретической механики и мехатроники
Научный руководитель: доктор технических наук,
профессор Яцун Сергей Федорович
Официальные оппоненты:а доктор технических наук, профессор
Головин Александр Александрович
кандидат технических наук, доцент
Шебанов Алексей Николаевич
Ведущая организация: Орловский государственный
технический университет
Защита состоится л 08 аноября а2007 г. в аа14 аач. а00 амин. в конференц-зале на заседании диссертационного совета Д212.105.01 при Курском государственном техническом университете по адресу: 305040, г. Курск, ул. 50 лет Октября, 94.
С диссертацией можно ознакомиться в библиотеке Курского государственного технического университета
Автореферат разослан л__ аоктября а2007 г.
Ученый секретарь
диссертационного совета Локтионова О.Г.
Общая характеристика работы
Актуальность темы. Одна из наиболее актуальных проблем современного автомобилестроения - упрощение и облегчение управления автомобилем - не может быть решена без автоматизации привода сцепления. Как показывает опыт создания автоматических трансмиссий, их совершенствование идет в двух направлениях: автоматизация управления механическими трансмиссиями, состоящими из ступенчатой коробки передач и фрикционного сцепления, и оснащение автомобилей автоматическими специализированными трансмиссиями.
Трансмиссии с автоматизированным приводом сцепления обладают достаточно широкими функциональными возможностями, что в определенной мере приближает достигаемый при их помощи комфорт управления к полностью автоматическим трансмиссиям. Также, по своему устройству автоматизированные трансмиссии гораздо проще и дешевле полностью автоматических.
Если брать во внимание российскую автомобильную промышленность, которая практически не устанавливает на выпускаемые автомобили автоматические трансмиссии, то автоматизация управления сцеплением является оптимальным решением при упрощении и облегчении управления автомобилями, особенно если их используют инвалиды с нарушениями функций левой ноги.
Таким образом, одним из актуальных направлений автомобилестроения является исследование динамики и разработка конструкций автоматизированных приводов механических сцеплений. Имеются разработки в этом направлении, такие, как электромагнитный привод Мегаматик, созданный ООО ОКА-АВТО совместно с НПП АВТОПРИВОД; электровакуумный привод ЭПС, разработанный специалистами из НАМИ и СеАЗа; электромеханический привод Twin clutch, сконструированный в Корее и др. Однако, несмотря на наличие устройств данного вида, их развитие сдерживается из-за отсутствия единой методики проектирования.
Необходимость разработки и создания эффективных математических моделей и алгоритмов расчета управляемых приводов сцеплений автомобилей, позволяющих значительно повысить ресурс и надежность трансмиссий, а, следовательно, и самих автомобилей, улучшить их динамические характеристики и создать конструкции, соответствующие современным требованиям к техническим и технологическим возможностям автомобильных узлов и агрегатов, определяет актуальность темы данного исследования.
Объектом исследования данной работы являются динамические процессы, протекающие в сложной мехатронной системе, состоящей из привода ведущего вала сцепления автомобиля, электромеханического привода выключения сцепления и системы автоматического управления приводами.
Целью диссертационной работы является повышение эффективности работы сцепления автомобиля за счет применения управляемого электромеханического привода.
Повышение эффективности заключается в снижении ударных динамических нагрузок в трансмиссии; сужении диапазона падения частоты вращения ведущего вала при включении сцепления; уменьшении влияния человеческого фактора на надежную работу сцепления; облегчении управления сцеплением.
Для достижения цели работы были поставлены и решены следующие задачи:
- анализ существующих технических решений и выбор способа управления автомобильным сцеплением;
- разработка расчетной схемы и математической модели динамики сцепления и его привода;
- исследование динамики управляемого электромеханического привода сцепления автомобиля;
- разработка методики проведения эксперимента и экспериментального стенда с автоматической обработкой результатов;
- проведение экспериментальных исследований динамики управляемого электромеханического привода сцепления автомобиля;
- разработка программного обеспечения для управления сцеплением автомобиля посредством электромеханического привода;
- разработка рекомендаций по проектированию управляемых электромеханических приводов автомобильных сцеплений.
Методы исследования. Для решения поставленных задач использовались: теория математического моделирования, законы теоретической механики и динамики машин, законы электродинамики, теория автоматического управления, а также методы математического моделирования, численного решения уравнений с применением ПЭВМ, цифровой обработки сигналов.
Достоверность полученных результатов обеспечена корректностью постановки задачи, обоснованностью использованных теоретических зависимостей и принятых допущений, применением известных математических методов; подтверждается сравнительным анализом результатов, полученных теоретически и в результате лабораторных испытаний, а также экспертизой предложенных в работе научно-технических решений Роспатентом.
Научная новизна:
- разработана математическая модель управляемого электро-механического привода сцепления, рассматриваемого как мехатронная система, адекватно описывающая процессы взаимодействия фрикционных дисков сцепления, зависящие от угла поворота вала мотор-редуктора привода выключения сцепления;
- предложена математическая модель упругой нелинейной характерис-тики диафрагменной пружины сцепления, анализ которой позволил выделить диапазон с квазинулевой и отрицательной жесткостью;
- установлено, что оптимальное регулирование скорости вращения ведомого вала сцепления возможно за счет управляемого включения сцепления с одновременным управлением скоростью вращения ведущего вала сцепления;
- разработана система автоматического управления приводом ведущего вала сцепления и электромеханическим приводом выключения сцепления.
Практическая ценность. В результате проведенных исследований сконструирован и изготовлен экспериментальный стенд, оснащенный управляемым электромеханическим приводом сцепления, а также разработано программное обеспечение, позволяющее осуществлять управление процессом выключения и включения сцепления. Результаты работы внедрены в производственный процесс Автотракторного управления ОАО Лебединский ГОК (Белгородская обл., г. Губкин) и используются для диагностики и дефектовки автомобильных сцеплений и их приводов. Также, результаты диссертации используются в учебном процессе Курского государственного технического университета.
Апробация работы. Основные положения диссертации докладывались и обсуждались на: VII Международной научно-технической конференции Вибрация - 2005. Вибрационные машины и технологии (Курск: КурскГТУ, 2005); IV Международной научно-технической конференции Современные инструментальные системы, информационные технологии и инновации (Курск: КурскГТУ, 2006); Международной научно-практической Интернет-конференцииа Проблемы создания и совершенствования строительных и дорожных машин (Белгород: Изд-во БГТУ им. В.Г. Шухова, 2006); Международной научно-практической конференции Образование, наука, производство и управление (Старый Оскол: СТИ МИСиС, 2006); Международной научно-технической конференции Актуальные проблемы динамики и прочности материалов и конструкций: модели, методы, решения (Орел: ОреГТУ, 2007).
Публикации. По материалам диссертации опубликовано 12 научных работ, включая 8 статей в научных сборниках и журналах, одна из которых в издании, рекомендованном ВАК, 3 патента Российской Федерации на полезную модель и 1 свидетельство об официальной регистрации программы для ЭВМ.
ичный вклад автора: на основе выполненного анализа отечественных и зарубежных литературных источников разработана расчетная схема и математическая модель управляемого электромеханического привода сцепления; создан экспериментальный стенд с автоматической обработкой результатов для исследования динамики управляемого электромеханического привода сцепления автомобиля; разработана система автоматического управления приводом ведущего вала сцепления и электромеханическим приводом выключения сцепления, состоящая из силовой, информационной и управляющей подсистем.
Структура и объем работы. Диссертация состоит из введения, четырех глав, заключения и библиографического списка, включающего 111 наименования. Объем диссертации 121 страница машинописного текста, 62 рисунка, 2 таблицы.
Основное содержание работы
Во введении обосновывается актуальность темы, определяется цель и задачи исследования. Сформулированы научные результаты и положения, выносимые на защиту, определена их научная новизна и практическая значимость, приведены сведения об апробации и внедрении работы. Кратко излагается содержание глав диссертации.
В первой главе приведена классификация и применяемость сцеплений и приводов управления сцеплениями, исследовано современное состояние вопроса в области разработки и расчета автоматизированных приводов сцеплений автомобилей. Рассмотрены способы управления сцеплением и определены преимущества и недостатки каждого из способов для различных режимов работы сцепления. Проведен обзор и анализ существующих конструкций управляемых приводов сцеплений, выявлены их достоинства и недостатки. К недостаткам можно отнести наличие дополнительных источников энергии, не изменяемая интенсивность включения сцепления, отсутствие возможности торможения двигателем и др.
Проведенный анализ позволил выявить такие основные преимущества электромеханического привода, как простота конструкции, отсутствие необходимости оборудования автомобиля дополнительным источником энергии, возможность установки на широкий круг легковых автомобилей, снижение ударных динамических нагрузок в трансмиссии.
Кроме того, описаны преимущества электроприводов постоянного тока и проанализированы способы регулирования частоты вращения вала электродвигателя.
В заключение первой главы определяется цель и задачи исследования.
Во второй главе рассматриваются вопросы моделирования динамики управляемого электромеханического привода сцепления.
Представлено описание основных режимов работы сцепления. Учитывая сложность и значимость переходного режима по отношению к другим, в работе принято рассмотрение именно этого режима.
На рис.1 показана расчетная динамическая схема трансмиссии автомобиля с фрикционным сцеплением, для которой можно записать следующую систему дифференциальных уравнений:
 , аа (1)
, аа (1)
где Jе - приведенный момент инерции вращающихся масс двигателя и ведущих деталей сцепления; Jа - приведенный момент инерции вращающихся масс нагрузки; Mе - крутящий момент двигателя; Mс - момент трения, передаваемый сцеплением; Mа - момент сопротивления вызванный действием нагрузки; ?1 - угловая скорость ведущего вала сцепления; ?2 - угловая скорость ведомого вала сцепления.
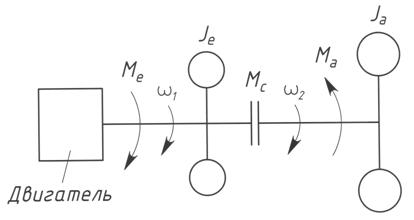
Рис. 1. Расчетная динамическая схема трансмиссии автомобиля
В качестве привода ведущего вала сцепления принят асинхронный электродвигатель, крутящий момент Mе которого определяется его механической характеристикой.
Момент Mа, вызванный действием нагрузки, принят равным постоянному значению которое лежит в пределах механической характеристики электродвигателя привода ведущего вала сцепления.
Момент, передаваемый сцеплением описан следующим выражением:
![]() ,аа (2)
,аа (2)
где rCP - средний радиус трения дисков сцепления; с - коэффициент жесткости диафрагменной пружины сцепления; ![]() а - коэффициент трения фрикционных накладок;
а - коэффициент трения фрикционных накладок; ![]() а - осевое перемещение диска сцепления.
а - осевое перемещение диска сцепления.
На рис. 2 представлена расчетная схема привода выключения сцепления, имеющая одну степень свободы.

Рис. 2. Расчетная схема привода сцепления:
1 - кривошип; 2 - трос; 3 - вилка сцепления; 4 - выжимной подшипник
Математическая модель привода сцепления строится с помощью уравнения движения системы в обобщенных координатах или уравнения Лагранжа II рода. За обобщенную координату системы принят угол ? - угол поворота кривошипа, причем ![]() .
.
 ,аа (3)
,аа (3)
где Т - кинетическая энергия системы; П - потенциальная энергия системы;
МВР - вращающий момент; МСП - момент сопротивления.
Кинетическая энергия всей системы

 .а (4)
.а (4)
где ![]() а - масса первого, третьего и четвертого звена соответственно;
а - масса первого, третьего и четвертого звена соответственно; ![]() а - длины звеньев и отрезков.
а - длины звеньев и отрезков.
Массой троса 2 пренебрегаем.
Потенциальная энергия деформированной пружины с коэффициентом жесткости с3
 .а (5)
.а (5)
Уравнение вращающего момента записано в виде механической характеристики электродвигателя постоянного тока
![]() ,а (6)
,а (6)
где  ; b - максимальное значение момента на валу;
; b - максимальное значение момента на валу;
?НОМ - номинальная угловая скорость.
Момент сопротивления, вызванный действием пружины сцепления
 , (7)
, (7)
где с - коэффициент жесткости диафрагменной пружины сцепления.
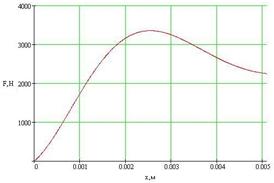
Упругую характеристику диафрагменной пружины аппроксимируем следующим выражением, учитывая ее специфику приведенную в литературных источниках:
 ,а (8)
,а (8)
где Н, А, ?, k - коэффициенты.
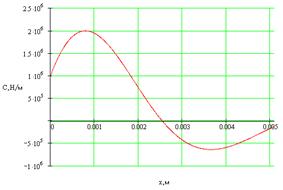
Решением уравнения (8) является графическая зависимость, представленная на рис. 3. Зависимость жесткости диафрагменной пружины от перемещения ![]() апредставлена на рис. 4.
апредставлена на рис. 4.
|
|
Рис. 3. Упругая характеристика диафрагменной пружины при Н = А = 2500; ? = 1100; k = 400 |
Рис. 4. Жесткость диафрагменной пружины при Н = А = 2500; ? = 1100; k = 400 |
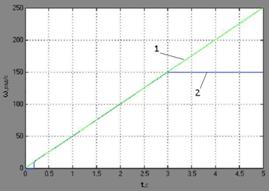
Результатом численного решения системы уравнений (1) является графическая зависимость угловых скоростей валов, представленная на рис. 5.
Рис. 5. Результат численного моделирования
Третья глава посвящена разработке экспериментального стенда для исследования динамики управляемого электромеханического привода сцепления автомобиля. Определена экспериментальным путем механическая характеристика электродвигателя переменного тока и проведены экспериментальные исследования для оценки работоспособности управляемого электромеханического привода сцепления, получения закономерности его работы и проверки адекватности, разработанной в диссертации математической модели.
Схема экспериментального стенда представлена на рис. 6. Основным элементом стенда является привод выключения сцепления, состоящий из мотор-редуктора 6, троса 5, соединенного с рычагом на выходном валу мотор-редуктора, и вилки 4.
Рис. 6. Схема экспериментального стенда: 1 - электродвигатель; 2 - сцепление; 3 - нагрузка; 4 - вилка; 5 - трос; 6 - мотор-редуктор; 7, 8 - датчики скоростей ведущего и ведомого валов; 9 - датчик усилия; 10 - датчик перемещения;
11 - ПЭВМ; 12 - конвертер; 13 - преобразователь частоты
Роль привода ведущего вала сцепления выполняет асинхронный электродвигатель 1 (Nном = 180 Вт, nном = 1400 об/мин) подключенный к ПЭВМ 11 через частотный преобразователь 13 и конвертер 12, что позволяет бесступенчато регулировать частоту вращения вала. Эксперименты проводились при скорости вращения вала электродвигателя ![]() арад/с. Программа управления стендом разработана в среде Borland C ++ и имеет пропорционально-интегрально-дифференциальный (ПИД) регулятор.
арад/с. Программа управления стендом разработана в среде Borland C ++ и имеет пропорционально-интегрально-дифференциальный (ПИД) регулятор.
Для определения механической характеристики асинхронного двигателя на экспериментальный стенд установлено навесное оборудование изображенное на рис. 7.
|
|
Рис. 7. Экспериментальный стенд с навесным оборудованием: 1 - стойка; 2 - рычаг; 3 - опорные диски; 4 - груз |
Рис. 8. Расчетная схема навесного оборудования |

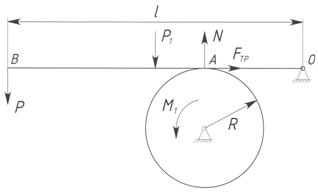
На раме экспериментального стенда неподвижно закреплена стойка 1, с которой шарнирно соединен рычаг 2 опирающийся на диски 3. На рычаг 2 подвешен груз 4. На рис. 8 представлена расчетная схема навесного оборудования, где ОА/ОВ = 1/3.
В точке В приложена сила Р вызванная действием груза. Сила Р1 представляет собой сосредоточенную нагрузку создаваемую собственным весом рычага.
Момент сопротивления
![]() ,а а (9)
,а а (9)
где R - радиус опорного диска;
FТР - сила трения,
![]() ,а аа а (10)
,а аа а (10)
где с - коэффициент трения;
N - реакция диска,
![]() ,а (11)
,а (11)
где Р - сила вызванная действием груза; Р1 - сосредоточенная нагрузка.
Эксперименты проводились с приложением различных значений силы Р при изменении питающего напряжения электродвигателя. Полученная механическая характеристика асинхронного двигателя представлена на рис. 9.
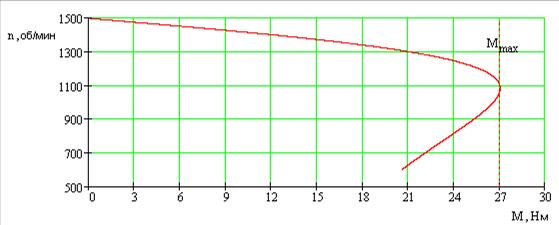
Рис. 9. Механическая характеристика асинхронного электродвигателя
При помощи программного обеспечения, которое поставляется вместе с модулем Е14-140 фирмы L-card возможно отслеживать работу сцепления экспериментального стенда в реальном времени. На экране отображаются последовательности импульсов, сформированные оптическими датчиками скорости вращения. Полученный массив значений обрабатывается с помощью программно-вычислительного пакета Mathcad Professional 2001, в результате чего определяется угловая скорость вращения каждого вала по формуле:
![]() ,аа (12)
,аа (12)
где Т - усредненный период импульсов.
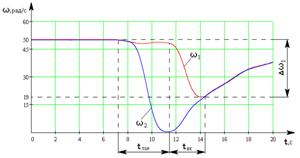
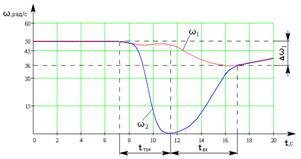
Результатами проведения экспериментов являются графические зависимости рис. 10, 11 изменения скоростей вращения валов сцепления от времени, сформированные математическим пакетом Mathcad Professional 2001. На графиках ![]() а - время торможения ведомого вала, а
а - время торможения ведомого вала, а ![]() а - время включения сцепления.
а - время включения сцепления.
|
|
Рис. 10. Включение сцепления без ПИД-регулирования |
Рис. 11. Включение сцепления с ПИД-регулированием |
На рис. 12, а представлена теоретическая зависимость скоростей вращения валов, где ![]() арад/с, а на рис. 12, б - экспериментальная зависимость, где
арад/с, а на рис. 12, б - экспериментальная зависимость, где ![]() арад/с.
арад/с.
|
|
а) |
б) |
Рис. 12. Графические зависимости изменения скоростей вращения валов сцепления: а - теоретическая; б - экспериментальная |
|
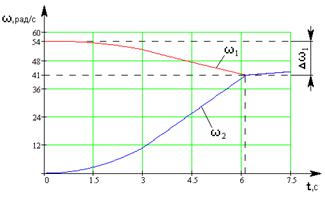
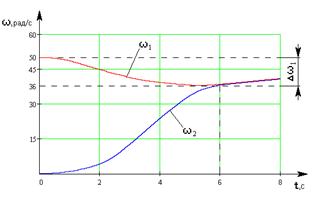
Сравнение теоретической и экспериментальной зависимостей скоростей вращения позволяет сделать вывод об адекватности математической модели реальному устройству и осуществить расчет основных параметров системы, обеспечивающих надежное осуществление процесса работы сцепления в переходном режиме.
В четвертой главе дано описание конструкции и принципа работы экспериментального стенда. Описана система автоматического управления электромеханическим приводом сцепления автомобиля, представленная в виде трех подсистем. Исследована система автоматического управления в среде MathLab Simulink.
Экспериментальный стенд для исследования динамики управляемого электромеханического привода сцепления представлен на рис. 13.

Рис. 13. Экспериментальный стенд
Система автоматического управления (САУ) электромеханическим приводом сцепления автомобиля (рис. 14) представлена в виде 3-х подсистем:
- силовой подсистемы;
- информационной подсистемы;
- управляющей подсистемы.
Рис. 14. Функциональная схема САУ
Силовая подсистема включает в себя привод М1 ведущего вала 1 сцепления 2, которое передает крутящий момент ведомому валу 3. Также в силовую подсистему входит привод выключения сцепления, состоящий из мотор-редуктора М2 и рычажной системы.
Информационная подсистема включает в себя датчики Д1 и Д2 угловых скоростей ведущего 1 и ведомого 3 валов сцепления соответственно, датчик усилия Д3, создаваемого приводом выключения сцепления, и датчик Д4 угла поворота выходного вала мотор-редуктора М2.
Управляющая подсистема состоит из блока обработки сигналов датчиков, блока управления приводом ведущего вала сцепления, блока управления приводом выключения сцепления и центрального блока управления.
Моделирование работы САУ выполнено в среде MathLab Simulink. На рис. 15 отчетливо видны нежелательные колебания при включении сцепления, а на рис.16 колебания отсутствуют благодаря введению ПИД-регулятора в систему управления.
|
|
Рис. 15. Зависимость скоростей валов без ПИД-регулирования |
Рис. 16. Зависимость скоростей валов при наличии ПИД-регулирования |

Основные результаты работы
- Проведен анализ существующих управляемых приводов сцепления автомобиля и выявлены такие основные преимущества электромеханического привода как простота конструкции, отсутствие необходимости оборудования автомобиля дополнительным источником энергии, возможность установки на широкий круг легковых автомобилей, снижение ударных динамических нагрузок в трансмиссии
- Разработана математическая модель управляемого электро-механического привода сцепления, рассматриваемого как мехатронная система, учитывающая нелинейную характеристику диафрагменной пружины сцепления;
- Установлена функциональная зависимость угловых скоростей вращения ведущего и ведомого валов сцепления от угла поворота вала мотор-редуктора привода выключения сцепления;
- Предложена конструкция управляемого электромеханического привода сцепления, позволяющая существенно упростить и облегчить управление автомобилем, которая защищена патентами Российской Федерации на полезную модель.
- Разработан экспериментальный стенд, оснащенный управляемым электромеханическим приводом сцепления, а также программное обеспечение на основе ПИД регулирования с учетом информации поступающей с датчиков позволяющие исследовать различные режимы работы сцепления автомобиля.
- Проведены экспериментальные исследования динамики управляемого электромеханического привода сцепления, что позволило выработать рекомендации по проектированию и применению устройств данного вида.
Основное содержание диссертационной работы изложено в следующих публикациях:
Публикации в изданиях, рекомендованных ВАК Российской Федерации:
- Яцун, С.Ф. Исследование работы автомобильного сцепления с автоматическим приводом при постоянной нагрузке / С.Ф. Яцун, И.П. Емель-янов // Известия ТуГУ. Серия. Вычислительная техника. Информационные технологии. Системы управления. Вып. 3. Системы управления. Том 2. - Тула: Изд-во ТуГУ, 2006. - С. 297-301.
Статьи, материалы конференций и другие публикации:
- Емельянов, И.П. Анализ динамики фрикционного сцепления при трогании автомобиля с места / И.П. Емельянов // Вибрационные машины и технологии: ав 2 ч. аЧ.2: асб. науч. тр. а - аКурск: аКурск. агос. атехн. аун-т, а2005. - С. 99-102.
- Яцун, С.Ф. Экспериментальный стенд для исследования динамики автомобильного сцепления и его привода / С.Ф. Яцун, И.П. Емельянов // Известия Курского государственного технического университета. - Курск: Курск. гос. техн. ун-т, 2006. - №2(17). - С.20-23.
- Яцун, С.Ф. Оптимальные способы автоматического управления автомобильным сцеплением с применением микроэлектроники / С.Ф. Яцун, И.П. Емельянов // Современные инструментальные системы, информационные технологии и инновации: материалы IV Международной научно-технической конференции: в 2 ч. Ч. 1. - Курск: Курск. гос. техн. ун-т, 2006. - С. 39-41.
- Емельянов, И.П. Применение оптических датчиков в авто-матизированном приводе сцепления автомобиля / И.П. Емельянов, Д.Ю. Шо-ренков // Современные инструментальные системы, информационные технологии и инновации: материалы IV Международной научно-технической конференции: в 2 ч. Ч. 2. - Курск: Курск. гос. техн. ун-т, 2006. - С. 143-146.
- Яцун, С.Ф. Автоматизированный привод сцепления автомобиля / С.Ф. Яцун, И.П. Емельянов // Проблемы создания и совершенствования строительных и дорожных машин: Сб. докл. Междунар. науч.-практич. Интернет-конф. - Белгород: изд-во БГТУ им. В.Г. Шухова, 2006. - С. 90-91.
- Яцун,а С.Ф. ааДинамический нализ аатрансмиссии втомобиля а/ аС.Ф. Яцун, И.П. Емельянов // Образование, наука, производство и управление: Сборник трудов международной научно-практической конференции: В 4-х т. - Старый Оскол: ООО ТНТ, 2006. - Т.4. - С. 521-524.
- Емельянов, И.П. Моделирование динамики автоматизированного привода сцепления автомобиля / И.П. Емельянов // Актуальные проблемы динамики и прочности материалов и конструкций: модели, методы, решения: материалы международной научно-технической конференции (1-3 июня 2007г., г. Самара). - Орел: ОреГТУ, 2007. - С. 128-130.
- Патент ана аполезную амодель а53232 аРоссийская аФедерация, аМПК7 В 60 К 23/02. Устройство для управления сцеплением транспортного средства / Яцун С.Ф., Емельянов И.П.; заявитель и патентообладатель Курск. гос. техн. ун-т. - №2005139490; заявл. 16.12.2005; опубл. 10.05.2006, Бюл. №13.
- Патент ана аполезную амодель а58478 аРоссийская аФедерация, аМПК7 В 60 W 10/02. Автоматизированное устройство для управления сцеплением транспортного средства / Яцун С.Ф., Емельянов И.П.; заявитель и патентообладатель Курск. гос. техн. ун-т. - №2006127147/22; заявл. 26.07.2006; опубл. 27.11.2006, Бюл. №33.
- Патент ана аполезную амодель а64159 аРоссийская аФедерация, аМПК7 В 60 W 10/02. Автоматическая система управления сцеплением транспортного средства / Яцун С.Ф., Емельянов И.П.; заявитель и патентообладатель Курск. гос. техн. ун-т. - №2007100283/22; заявл. 09.01.2007; опубл. 27.06.2007, Бюл. №18.
- Свидетельство об официальной регистрации программы для ЭВМ. Программа адля ауправления амехатронными асистемами а/ аЯцун аС.Ф., аЕмель-янов И.П., Деменюк А.А. - №2007614118; заявл. 25.06.2007; зарегистрировано 26.09.2007.
ИД №06430 от 10.12.01
Подписано в печать 05.10.2007. Формат 60х48 1/16.
Печатных листов 1,0. Тираж 100 экз. заказ .
Курский государственный технический университет.
Издательско-полиграфический центр
Курского государственного технического университета.
305040, Курск, ул. 50 лет Октября, 94
Авторефераты по темам >>
Разные специальности - [часть 1] [часть 2]