
 Авторефераты по темам >>
Разные специальности - [часть 1] [часть 2]
Авторефераты по темам >>
Разные специальности - [часть 1] [часть 2]
Совершенствование систем автоматического регулирования нажатия токоприемников скоростного электроподвижного состава
Автореферат кандидатской диссертации
На правах рукописи
АРЬКИНа Иван аВалерьевич
СОВЕРШЕНСТВОВАНИЕ аСИСТЕМ аАВТОМАТИЧЕСКОГОа РЕГУЛИРОВАНИЯ аНАЖАТИЯ аТОКОПРИЕМНИКОВ
СКОРОСТНОГО аЭЛЕКТРОПОДВИЖНОГОа СОСТАВАа
Специальность 05.22.07 - Подвижной состав железных дорог,
тяга поездов и электрификация
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
ОМСК - 2012
Работа выполнена в федеральном государственном бюджетном образовательном учреждении высшего профессионального образования Омский государственный университет путей сообщения (ОмГУПС (ОмИИТ).
Научный руководитель:
доктор технических наук, профессор
СИДОРОВ Олег Алексеевич.
Официальные оппоненты:
доктор технических наук, профессор
ХАРЛАМОВ Виктор Васильевич
профессор кафедры Электрические машины и общая электротехника, ОмГУПС;
кандидат технических наук, доцент
РУППЕЛЬ Алексей Александрович
заведующий кафедрой Автоматизация производственных процессов и электротехника, СибАДИ.
Ведущая организация:
ФГБОУ ВПО Дальневосточный государственный университет путейа асообщения (ДВГУПС).
аа Защита диссертации состоится 20 апреля 2012 г. в 9 часов на заседании диссертационного совета Д 218.007.01 при ФГБОУ ВПО Омский государственный университет путей сообщения (ОмГУПС (ОмИИТ) по адресу: 644046, г. Омск, пр. Маркса, 35, ауд. 219.
С диссертацией можно ознакомиться в библиотеке Омского государственного университета путей сообщения.
аа Автореферат разослан 19 марта 2012 г.
аа Отзывы на автореферат в двух экземплярах, заверенные гербовой печатью учреждения, просим направлять в адрес диссертационного совета
Д 218.007.01.
Тел./факс: (3812) 31-13-44; e-mail: nauka@omgups.ru
аа Ученый секретарь
диссертационного совета
доктор технических наук,
профессор О. А. Сидоров.
________________________
й Омский гос. университет
![]() а путей сообщения, 2012
а путей сообщения, 2012
ОБЩАЯа ХАРАКТЕРИСТИКАа РАБОТЫ
Актуальность проблемы. В соответствии со стратегией развития железнодорожного транспорта в Российской Федерации до 2030 г. в настоящее время необходимо решать задачи по созданию скоростного и высокоскоростного движения. При реализации высоких скоростей движения особенно актуальной во всем мире остается проблема обеспечения надежного и качественного токосъема, одним из перспективных решений которой является применение систем автоматического регулирования (САР) нажатия токоприемников.
Настоящая работа посвящена разработке и совершенствованию САР нажатия токоприемников, позволяющих снизить износ контактирующих элементов за счет поддержания нажатия в заданном диапазоне, предотвращения искрения и дугообразования в контакте и, как следствие, исключения пережогов и отжигов контактных проводов.
Цель диссертационной работы - повышение качества токосъема путем снижения коэффициента искрения токоприемников скоростного электроподвижного состава (ЭПС) за счет совершенствования САР нажатия.
Для достижения указанной цели в диссертационной работе поставлены следующие задачи:
1) выполнить анализ существующих САР нажатия и методов регистрации искрения токоприемников;
2) разработать математическую модель САР нажатия токоприемника с позиционным регулятором, датчиками искрения и скорости;
3) усовершенствовать методику расчета взаимодействия авторегулируемого токоприемника с контактной подвеской с учетом отрывов полоза от контактного провода;
4) реализовать САР нажатия токоприемника, основанную на применении позиционного регулятора, датчиков искрения и скорости;
5) создать методику экспериментальных исследований авторегулируемого токоприемника, оснащенного датчиками искрения и скорости;
6) выполнить оценку возможности применения САР нажатия с регулятором нечеткой логики;
7) оценить технико-экономическую эффективность предлагаемых технических решений.
Методы исследования. Теоретические исследования проведены на аоснове методов математического моделирования на ПЭВМ с использованием программ Solidworks и Matlab, теории автоматического управления, теории планирования эксперимента, статистического и корреляционного анализа. Экспериментальные исследования проводились на лабораторных установках и действующих участках магистральных железных дорог.
Научная новизна работы заключается в следующем:
1) разработана математическая модель САР нажатия токоприемника с датчиками искрения и скорости, учитывающая влияние закона управления на показатели качества работы системы;
2) усовершенствована методика расчета взаимодействия авторегулируемого токоприемника с контактной подвеской, учитывающая отрывы полоза от контактного провода;
3) создана методика лабораторных испытаний авторегулируемого токоприемника, оснащенного датчиками искрения и скорости.
аДостоверность научных положений и результатов диссертационной работы обоснована теоретически и подтверждена результатами лабораторных и натурных экспериментов. Расхождение результатов теоретических исследований с экспериментальными данными не превышает 7 %.
Практическая ценность работы заключается в следующем:
1) разработанная САР нажатия токоприемника, основанная на применении датчиков искрения и скорости, позволяет повысить качество токосъема за счет снижения коэффициента искрения токоприемника в 2,5 раза;
2) усовершенствованная математическая модель взаимодействия авторегулируемого токоприемника с контактной подвеской позволяет определить рациональные параметры САР нажатия токоприемника для различных условий эксплуатации;
3) разработанная методика лабораторных испытаний авторегулируемого токоприемника, оснащенного датчиками искрения и скорости, обеспечивает оперативную настройку параметров системы, оценку работоспособности и эффективности применения САР нажатия.
Реализация результатов работы. Разработанная САР нажатия внедрена в ЗАО Универсал - контактные сети в техническом проекте токоприемника в рамках темы Разработка и организация высокотехнологичного производства нового магистрального токоприемника для применения на линиях с модернизированной инфраструктурой системы токосъема, реализуемой при поддержке Минобрнауки России.
ичный вклад соискателя. Разработка и исследование вариантов САР нажатия скоростного токоприемника выполнены на основе предложенных автором методов. Основные научные положения и результаты, изложенные в диссертации, получены автором самостоятельно.
Апробация работы. Основные положения, выводы и рекомендации диснсертационной работы докладывались и обсуждались на VI международном симпозиуме Элтранс (Санкт-Петербург, 2011); на X и XI международных нанучно-практических конференциях Моделирование. Теория, методы и среднства (Новочеркасск, 2010, 2011); на IV международной научно-практической конференции Трансэлектро-2010 (Днепропетровск, 2010); на всероссийской научно-практической конференции Транспорт-2009 (Ростов-на-Дону, 2009); на II межвузовской научно-практической конференцииа Транспортная инфранструктура Сибирского региона (Иркутск, 2011);а на научно-технических семиннарах кафедры Электроснабжение железнодорожного транспорта ОмГУПСа в 2007 - 2012 гг.
Публикации. Основное содержание работы опубликовано в семнадцати печатных работах, которые включают в себя семь статей и семь тезисов докладов, получено три патента РФ на полезные модели. Три статьи [1 - 3] опубликованы в изданиях, определенных ВАК Минобрнауки России.
Структура и объем работы. Диссертационная работа состоит из введения, шести разделов, заключения, библиографического списка из 125 наименований и одного приложения. Общий объем диссертации составляет 145 страниц, включая 12 таблиц и 105 рисунков.
ОСНОВНОЕа СОДЕРЖАНИЕа РАБОТЫ
аа Во введении рассматривается состояние проблемы, обосновывается ее актуальность, формулируются задачи исследования и намечаются пути их
решения.
В первом разделе выполнен анализ известных САР нажатия токоприемников ЭПС, на основании которого основным их недостатком признана неспособность реагировать на искрение в контакте, что является наиболее опасным режимом токосъема.
Нарушение контакта между токоприемником и контактным проводом сопровождается возникновением электрической дуги, которая приводит к повышенному износу контактных элементов, появлению сильных электромагнитных помех, отжигам и пережогам контактных проводов.
Анализ устройств и методов регистрации искрения токоприемников показал перспективность развития бесконтактных дистанционных средств измерения, принцип действия которых основан на регистрации ультрафиолетового (УФ) излучения.
Во втором разделе рассмотрены особенности работы позиционного регулятора, пропорционально-интегрально-дифференциального регулятора и регулятора нечеткой логики в составе САР нажатия токоприемника. Для решения поставленных задач выбран надежный, обладающий невысокой стоимостью и не требующий установки датчика нажатия позиционный регулятор. Выбор измерительной части САР нажатия основывается на результатах испытаний устройств токосъема на линии Москва - Санкт-Петербург, которые показали, что датчики нажатия обладают инерционностью и не позволяют регистрировать микроотрывы, сопровождающиеся интенсивным искрением. При этом резкое увеличение интенсивности искрения и среднеквадратичного отклонения (СКО) контактного нажатия происходит при скорости движения свыше 160 км/ч.
Для исключения описанных негативных последствий и обеспечения более качественного токосъема предлагается САР нажатия с позиционным регулятором, датчиками искрения и скорости (рис. 1).
Токоприемник 1 оснащен пневмо-приводом 2, выполненным в виде резиннокордного элемента (РКЭ). Полость РКЭ соединена с источником сжатого воздуха (ИСВ) посредством двух магинстралей, одна из которых подает воздух, сжатый до рабочего давления Рном, через электропневматический распределитель ЭПР 1, а другая предназначена для увенличения давления в РКЭ до 1,4 Рном ченрез ЭПР 2. Распределитель ЭПР 3 преднназначен для сброса сжатого воздуха из РКЭ в атмосферу и опускания токопринемника. Блок управления (БУ) обрабантывает сигналы от датчика искрения 3 и датчика скорости (ДС) и формирует уп- |
Рис. 1. Схема САР нажатия токоприемника |
равляющее воздействие на один из ЭПР.
Предложен способ регулирования нажатия по сигналам датчиков скорости и искрения, основанный на двухпозиционном законе управления (рис. 2). При скорости движения до 160 км/ч БУ вычисляет коэффициент искрения:
|
|
(1) |
где ![]() Ц суммарное время искрения за период обработки данных t.
Ц суммарное время искрения за период обработки данных t.
При увеличении kи до установнленного значения БУ увеличивает нанжатие токоприемника.а Для исключенния автоколебательного режима после переключения установлена выдержка времени, равная времени регулированния САР. При скорости свыше 160 км/ч токоприемник движется с повышенным нажатием иа датчик искрения не участнвует в работе САР. Для определения влияния САР нажатия на качество токосъема состав- |
Рис. 2. Принцип действия САР нажатия с позиционным регулятором |
ена математическая модель взаимодействия авторегулируемого токоприемника с контактной подвеской, учитывающая отрывы полоза от контактного провода, расчетные схемы которой приведены на рис. 3.
Исследование взаимодействия токоприемника с контактной подвеской проводили ученые И. И. Власов, К. Г. Марквардт, А. В. Плакс, В. А. Ан, А. В. Фрайфельд, В. П. Михеев, С. Н. Ковалев, Т. А. Тибилов, И. А. Беляев, аВ. А. Вологин, А. В. Ефимов, А. Г. Галкин, О. А. Сидоров, В. М. Павлов, В. А. Нехаев, А. Н. Смердин, А. Н. Горбань, Р. Ниблер, Н. Сибата и др.
|
На рис. 3 приняты следуюнщие обозначения: жк.п - жесткость контактной поднвески; rк.п - коэфнфициент вязкого трения контактной подвески; mк.п - масса контактной подвески, сосредонточенная над полонзом; жк - контактнная жесткость; rк - коэффициент вяз- |
 Рис. 3. Расчетные схемы взаимодействия авторегулируенмого токоприемника с контактной подвеской: аа - при контакте между полозом и контактным проводом, б - при отрыве полоза от контактного провода
Рис. 3. Расчетные схемы взаимодействия авторегулируенмого токоприемника с контактной подвеской: аа - при контакте между полозом и контактным проводом, б - при отрыве полоза от контактного провода кого трения контакта; mп - приведенная масса полоза; wпр - сила сухого трения каретки; жпр - жесткость каретки; rпр - коэффициент вязкого трения каретки; аmр - приведенная масса системы подвижных рам; rр - коэффициент вязкого трения системы подвижных рам; wр - сила сухого трения в системе подвижных рам; Pр - статическое нажатие токоприемника; Pуп - управляющее воздействие; Pв.р и Pв.п - аэродинамические силы, воздействующие на систему подвижных рам и полоз токоприемника; yосн - координата основания токоприемника в вертикальном направлении; yр - высотное положение рамы токоприемника;аа аyп - высотное положение полоза токоприемника; yк - координата точки контакта; yк.п - координата контактной подвески.
Анализ трудов зарубежных и отечественных ученых по расчетам взаимодействия токоприемника с контактной подвеской позволил выделить два основных алгоритма расчета контактного нажатия и учета отрывов токоприемника: методы множителей Лагранжа и штрафных функций. Особенностью метода штрафных функций является использование дополнительных переменных жк и rк, характеризующих пару контактирующих тел. Нарушению условия непроникновения соответствует положительная энергия, пропорциональная штрафным множителям.
В процессе моделирования с помощью метода штрафных функций был реализован алгоритм, описывающий контакт между полозом токоприемника и контактным проводом и позволяющий учесть отрывы токоприемника:
|
|
(2) |

Для расчета взаимодействия токоприемника с контактной подвеской использованы уравнения Лагранжа второго рода. При ![]() адифференциальные уравнения движения рамы, полоза токоприемника и контактной подвески имеют вид:
адифференциальные уравнения движения рамы, полоза токоприемника и контактной подвески имеют вид:
а |
(3) |
где bp и bпр - коэффициенты, используемые для определения сил сухого трения рам и каретки токоприемника, с/м.аа
При ![]() атокоприемник и контактная подвеска рассмотрены как отдельные системы, дифференциальные уравнения движения которых имеют вид:
атокоприемник и контактная подвеска рассмотрены как отдельные системы, дифференциальные уравнения движения которых имеют вид:
|
(4) |
Управляющее воздействие моделируется в виде релейного элемента, выходное значение которого зависит от коэффициента отрывов токоприемника kо и скорости движения v:
|
|
(5) |
Для учета влияния вертикальных колебаний основания токоприемника на процесс токосъема используется линейчатая одноосная модель ЭПС.
На основании расчетов и проведенных лабораторных исследований РКЭ принимается колебательным звеном, ЭПР - апериодическим, а датчики искрения и скорости - усилительными звеньями.
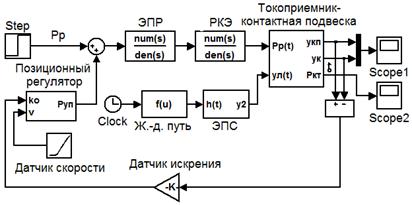
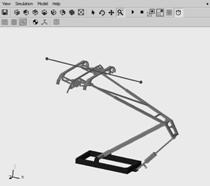
Моделирование САР нажатия выполняется в программе Matlab Simulink (рис. 4). Система токоприемник - контактная подвеска моделируется в виде отдельных тел, имеющих массовые и инерционные характеристики, в пакете физического моделирования Simmechanics (рис. 5).
Рис. 4. Структурная схема САР нажатия в Matlab Simulink |
Рис. 5. Модель системы токоприемник - контактная подвеска |
Оценка устойчивости САР нажатия производится с помощью метода фазовых траекторий (рис. 6). САР нажатия с позиционным регулятором устойчива, имеет близкий к апериодическому переходной процесс, время регулирования - 2,54 с, ошибка регулирования - 3,2 % (рис. 7).
Рис. 6. Пример фазовой траектории САР нажатия токоприемника |
Рис. 7. Переходной процесс САР нажатия с позиционным регулятором |
С помощью разработанной математической модели, учитывающей отрывы полоза токоприемника от контактного провода, выполнен расчет взаимодействия токоприемника с контактной подвеской (рис. 8) и оценено влияние САР
нажатия на коэффициент отрывов токоприемника. САР нажатия при увеличении скорости движения свыше 160 км/ч перенводит статическое нажантие на повышенное значенние, позволяя избежать зоны отрывов и интенсивнного искрения, являюнщихся наиболее опасным режимом токосъема (рис. 9). Применение САР нажатия с позиционным регулятором рекомендунется при любых скоростях движения, особенно на участках с разрегулиронванной контактной поднвеской и на участках интеннсивного искрения. |
|
|
 Рис. 8. Координаты контактного провода и полоза (а) и изменение контактного нажатия токоприемника (б), оснащенного САР нажатия
Рис. 8. Координаты контактного провода и полоза (а) и изменение контактного нажатия токоприемника (б), оснащенного САР нажатия  Рис. 9. Изменение контактного нажатия при движении ЭПС с ускорением 1 м/с2апри работе САР нажатия по каналу датчика скорости
Рис. 9. Изменение контактного нажатия при движении ЭПС с ускорением 1 м/с2апри работе САР нажатия по каналу датчика скоростиВ третьем разделе рассмотрены особенности САР нажатия токоприемника, в качестве измерительной части которой используются датчик искрения и GPS - датчик скорости, устанавливаемые вне токоведущих частей токоприемника, что исключает необходимость применения гальванической развязки и внесения изменений в конструкцию токоприемника. Разработанный датчик искрения регистрирует УФ-излучение от искрения и за счет узкого спектрального диапазона (220 - 280 нм) не реагирует на солнечный свет и источники искусственного освещения.
Предложены электрическая и пневматическая схемы САР нажатия, позволяющие обеспечить требования, предъявляемые к управлению токоприемником, как в ручном, так и в автоматическом режиме.
Разработан и запрограммирован блок управления САР нажатия на базе промышленного логического контроллера, обрабатывающий информацию с установленных датчиков и управляющий тремя ЭПР.
В четвертом разделе представлены методики экспериментальных исследований разработанного датчика искрения и САР нажатия токоприемника и рассмотрены результаты испытаний.
Испытания датчика искрения токоприемника доказали, что он может использоваться в качестве измерительной части САР нажатия, а также для регистрации коэффициента искрения на вагоне-лаборатории испытаний контактной сети. Определено, что при увеличении тока нагрузки и скорости движения коэффициент искрения возрастает, эффективной мерой для снижения коэффициента искрения является увеличение статического нажатия токоприемника.
kи = 7,3 % а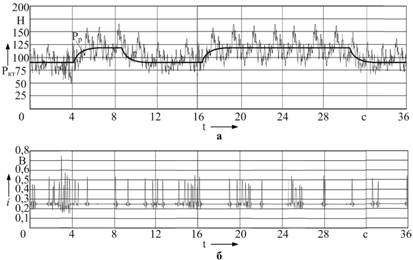 Рис. 10. Испытания САР нажатия: нажатие (а) и искрение (б) токоприемника |
Испытания разработанной САР нажатия позволили сделать вывод о ее работоспособности (рис. 10) и эффективности применения в целях снижения коэффициента искрения токоприемника. По результатам испытаний определены коэффициенты искрения и СКО контактного нажатия для |
токоприемника без САР и токоприемников, оснащенных существующей в ОмГУПСе САР с датчиком нажатия и разработанной САР с датчиком искрения. Анализ данных параметров показал, что применение предлагаемой САР нажатия позволяет снизить коэффициент искрения в 2,5 раза, при этом СКО контактного нажатия увеличивается лишь на 5 %.
Для оценки адекватности разработанной математической модели кривая контактного нажатия, полученная расчетным путем, сравнивается с данными, полученными в ходе испытаний на линии Москва - Санкт-Петербург. Переходные процессы нажатия токоприемника, полученные расчетным путем, сравни-
ваются с переходными процессами, полученными в ходе лабораторных испытаний в ОмГУПСе на кольцевом стенде (рис. 11). Результаты испытаний подтверждают полученные расчетным путем характеристики, разница в полученных данных не превышает 7 %. В пятом разделе выполнена оценка возможности применения модернизирован- |
|
 аРис. 11. Сравнение переходных процессов САР нажатия
аРис. 11. Сравнение переходных процессов САР нажатияной САР нажатия с регулятором нечеткой логики и электропневматическим преобразователем, заменяющим три ЭПР. Основной целью нечеткого регулятора является снижение механического износа контактных элементов за счет наличия зоны регулирования и возможности снижения статического нажатия при отсутствии искрения (рис. 12).
|
Входными параметрами нечеткого регулятора служат скорость движения ЭПС и коэффициент отрывов токоприемника, выходным - управляющее воздействие. Входные и выходные |
 Рис. 12. Принципы действия позиционного (а) и нечеткого (б) регуляторов
Рис. 12. Принципы действия позиционного (а) и нечеткого (б) регуляторов параметры описываются набонром термов: низкий, средний, высокий и т. д. Для всех термов заданы треугольные и трапецеидальные функции принадлежности, количественные характеристики которых определены по экспериментальным данным, полученным в ходе испытаний на линии Москва - Санкт-Петербург.
Программирование нечеткого регулятора выполнено по алгоритму Мамдани, включающему в себя этапы формирования базы правил (рис. 13), фаззификации, нечеткого вывода, композиции и дефаззификации.
Модернизированная САР нажатия имеет колебательный переходной процесс (рис. 14) с незначительным перерегулированием - 9,3 % и позволяет сни-
Рис. 13. Поверхность входы - выход нечеткого регулятора |
зить время регулирования с 2,54 до 1,24 с, ошибку регулирования - са 3,2 до 1,8 % по сравнению с позиционным регулятором. Результаты моделирования показали эффективность применения регулятора нечеткой логики для снижения коэффициента отрывов (рис. 15). |
|
Рис. 15. Коэффициенты отрывов аатокоприемников |
 Рис. 14. Переходной процесс САР анажатия с нечетким регулятором
Рис. 14. Переходной процесс САР анажатия с нечетким регулятором
САР нажатия с регулятором нечеткой логики рекомендуется применять при любых скоростях движения, но только после накопления статистических данных об условиях токосъема на участке.
В шестом разделе рассчитана технико-экономическая эффективность применения САР нажатия с позиционным регулятором. Экономический эффект достигается за счет снижения затрат на обслуживание токоприемников и уменьшения годовой потребности в токосъемных элементах и составляет аа177 669 р. на один токоприемник за 10 лет эксплуатации; инвестиционный проект можно считать экономически эффективным.
ОСНОВНЫЕа РЕЗУЛЬТАТЫа Иа ВЫВОДЫ
1. Выполнен анализ существующих САР нажатия скоростных токоприемников, на основании которого предложены пути их совершенствования.
2. Разработана математическая модель САР нажатия токоприемника с позиционным регулятором, датчиками искрения и скорости, позволяющая определить устойчивость системы, показатели качества САР нажатия и показатели качества токосъема.
3. Усовершенствована методика расчета взаимодействия авторегулируемого токоприемника с контактной подвеской, учитывающая отрывы полоза от контактного провода.
4. Реализована САР нажатия с позиционным регулятором, датчиками искрения и скорости, обеспечивающая снижение коэффициента искрения токоприемника в 2,5 раза.
5. Создана методика лабораторных испытаний авторегулируемого токоприемника, оснащенногоа датчиками искрения и скорости.
6. Установлено, что применение модернизированной САР нажатия с регулятором нечеткой логики и электропневматическим преобразователем позволяет снизить время регулирования с 2,54 до 1,24 с, ошибку регулирования - с 3,2 до 1,8 %.
7. Определено, что экономический эффект от использования модернизированных токоприемников составляет 177 669 р. на один токоприемник за 10 лет эксплуатации, срок окупаемости инвестиций составляет три года.
Список работ, опубликованных по теме диссертации
В изданиях, определенных ВАК Минобрнауки России:
1. Сидоров О. А. Применение систем автоматического регулирования контактного нажатия на токоприемниках скоростного электроподвижного состава / О. А. Сидоров, А. Е. Аркашев, И. В. Ларькин // Транспорт Урала / Уральский гос. ун-т путей сообщения. Екатеринбург, 2010. № 25. С. 83 - 87.
2. Сидоров О. А. Моделирование взаимодействия авторегулируемого токоприемника с контактной подвеской / О. А. Сидоров, А. Е. Аркашев, ааИ. В. Ларькин // Современные технологии. Системный анализ. Моделирование / Иркутский гос. ун-т путей сообщения. Иркутск, 2011. № 3 (31). С. 164 - 169.
3. Аркашев А. Е. Моделирование взаимодействия токоприемника и контактной подвески с учетом отрывов полоза от контактного провода / аА. Е. Аркашев, И. В. Ларькин // Известия Транссиба / Омский гос. ун-т путей сообщения. Омск, 2011. № 3 (7). С. 2 - 8.
В прочих изданиях:
4. Аркашев А. Е. Применение пневматических резинокордных элементов в конструкциях токоприемников электрического транспорта / А. Е. Аркашев, И. В. Ларькин // Совершенствование технологии ремонта и эксплуатации подвижного состава: Сб. науч. статей аспирантов и студентов университета / Омский гос. ун-т путей сообщения. Омск, 2007. Вып. 7.а С. 6 - 11.
5. Сидоров О. А. Токоприемник, оснащенный системой автоматического регулирования нажатия / О. А. Сидоров, А. Е. Аркашев, И. В. Ларькин // Транспорт-2009: Труды науч.-практ. конф. / Ростовский гос. ун-т путей сообщения. Ростов-на-Дону, 2009. Ч. 3. С. 278 - 280.
6. Совершенствование токоприемников электроподвижного состава / аО. А. Сидоров, И. В. Ларькин и др. // Инновационные проекты и новые технологии на железнодорожном транспорте: Материалы науч.-практ. конф. / Омский гос. ун-т путей сообщения. Омск, 2009. С. 89 - 92.
7. Ларькин И. В. Моделирование токоприемника электроподвижного состава в Matlab Simulink / И. В. Ларькин // Моделирование. Теория, методы и средства: Материалы X междунар. науч.-практ. конф. / Южно-российский гос. техн. ун-т. Новочеркасск, 2010. С. 83 - 86.
8. Ларькин И. В. Модернизация системы автоматического регулирования нажатия токоприемника электроподвижного состава / И. В. Ларькин, А. Е. Аркашев // Развитие дорожно-транспортного комплекса и строительной инфраструктуры на основе рационального природопользования: Материалы V науч.-практ. конф. студентов, аспирантов и молодых ученых / Сибирская гос. автомобильно-дорожная акад. Омск, 2010. С. 268 - 271.
9. Ларькин И. В. Применение датчиков искрения в системах автоматического регулирования нажатия токоприемников электрического транспорта / И. В. Ларькин, С. Ю. Сосновский // Электрификация транспорта Транс- электро-2010: Материалы IV междунар. науч.-практ. конф. / Днепропетровский национальный ун-т железнодорожного транспорта им. академика В. Лазаряна. Днепропетровск, 2010. С. 20, 21.
10. Ларькин И. В. Совершенствование устройств автоматического регулирования скоростных токоприемников / И. В. Ларькин, А. Е. Аркашев, С. Ю. Сосновский // Инновации для транспорта: Сб. науч. статей с междунар. участием / Омский гос. ун-т путей сообщения. Омск, 2010. Ч. 1. С. 180 - 184.
11. Ларькин И. В. Система регулирования нажатия токоприемника, основанная на нечеткой логике / И. В. Ларькин, С. Ю. Сосновский // Моделирование. Теория, методы и средства: Материалы XI междунар. науч.-практ. конф. / Южно-российский гос. техн. ун-т. Новочеркасск, 2011. С. 137 - 141.
12. Исследование системы автоматического регулирования нажатия токоприемника электроподвижного состава / И. В. Ларькин, А. Е. Аркашев и др. // Актуальные проблемы проектирования и эксплуатации контактных подвесок и токоприемников электрического транспорта: Сб. науч. статей с междунар. участием / Омский гос. ун-т путей сообщения. Омск, 2011. С. 114 - 122.
13. Сидоров О. А. Определение закона регулирования нажатия токоприемника электроподвижного состава / О. А. Сидоров, И. В. Ларькин,а С. Ю. Сосновский // Транспортная инфраструктура Сибирского региона: Материалы II межвуз. науч.-практ. конф. / Иркутский гос. ун-т путей сообщения. Иркутск, 2011. Т. 1. С. 569, 570.а
14. Аркашев А. Е. Устройство для регистрации искрения токоприемника электроподвижного состава / А. Е. Аркашев, И. В. Ларькин, С. Ю. Сосновский // Электрификация и развитие инфраструктуры энергообеспечения тяги поездов на железнодорожном транспорте Eltrans 2011: Тезисы докл. VI междунар. симпозиума / Петербургский гос. ун-т путей сообщения. СПб, 2011. С. 8, 9.
15. Пат. РФ на полезную модель № 105862, МПК В 60 L 5/00. Токоприемник электроподвижного состава / О. А. Сидоров, А. Е. Аркашев, аИ. В. Ларькин, С. Ю. Сосновский (Россия). - № 2011100366/11; Заявлено 11.01.2011; Опубл. 27.06.2011 // Открытия. Изобретения. 2011. № 18. аа
16. Пат. РФ на полезную модель № 105863, МПК В 60 M 1/00. Стенд для исследования взаимодействия токоприемника и контактной подвески / аО. А. Сидоров, А. В. Тарасенко, А. Е. Аркашев, И. В. Ларькин, С. Ю. Сосновский (Россия). - № 2011100364/11; Заявлено 11.01.2011; Опубл. 27.06.2011 // аОткрытия. Изобретения. 2011. № 18. а
17. Пат. РФ на полезную модель № 112107, МПК В 60 L 5/28. Токоприемник электроподвижного состава / О. А. Сидоров, И. Е. Чертков, А. Е. Аркашев, И. В. Ларькин (Россия). - № 2011131552/11; Заявлено 27.07.2011; Опубл. 10.01.2012 // аОткрытия. Изобретения. 2012. № 1.
___________________________________________________
Типография ОмГУПСа. 2012. Тираж 120 экз. Заказ .
![]()
 644046, г. Омск, пр. Маркса, 35
644046, г. Омск, пр. Маркса, 35
Авторефераты по темам >>
Разные специальности - [часть 1] [часть 2]