
 Авторефераты по темам >>
Разные специальности - [часть 1] [часть 2]
Авторефераты по темам >>
Разные специальности - [часть 1] [часть 2]
Обоснование оптимальных параметров винтовых анкеров и редуктора привода вращения
Автореферат кандидатской диссертации

ебедев Сергей Владимирович
ОБОСНОВАНИЕ ОПТИМАЛЬНЫХ ПАРАМЕТРОВ ВИНТОВЫХ АНКЕРОВ И РЕДУКТОРА ПРИВОДА ВРАЩЕНИЯ
05.05.04 - Дорожные, строительные и подъемно-транспортные машины
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Новочеркасск - 2012
Работа выполнена в Балаковском институте техники, технологии и управления (филиале) ФГБОУ ВПО Саратовский государственный технический университет им. Гагарина Ю.А. на кафедре Подъемно-транспортные, строительные и дорожные машины.
Научный руководитель:
доктор технических наук, профессор, зав. кафедрой Подъемно-транспортные, строительные и дорожные машины Балаковского института техники, технологии и управления (филиала) ФГБОУ ВПО СГТУ им. Гагарина Ю.А. Кобзев Анатолий Петрович
Официальные оппоненты:
доктор технических наук, профессор, зав. кафедрой Машины и оборудование предприятий стройиндустрии Шахтинского института (филиала) ФГБОУ ВПО ЮРГТУ (НПИ) Евстратов Владимир Александрович;
доктор технических наук, профессор кафедры Машины природообустрой-ства ФГБОУ ВПО Новочеркасская государственная мелиоративная академия Максимов Валерий Павлович.
Ведущая организация: ФГБОУ ВПО Пензенский государственный университет.
Защита диссертации состоится л05 июля 2012 г. в 12.00 на заседании диссертационного совета Д 212.304.04 при Федеральном государственном бюджетном образовательном учреждении высшего профессионального образования Южно-Российский государственный технический университет (Новочеркасский политехнический институт) по адресу: 346428, г. Новочеркасск Ростовской области, ул. Просвещения, 132, ауд. 149 главного корпуса.
С диссертацией можно ознакомиться в научно-технической библиотеке ФГБОУ ВПО Южно-Российский государственный технический университет (Новочеркасский политехнический институт).
|

Автореферат разослан л30 мая 2012 г.
Ученый секретарь диссертационного совета, доктор технических наук, профессор
B.C. Исаков
3
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы исследования. Винтовые анкеры в последние годы находят широкое применение для закрепления оттяжек опор линий электропередачи и радиомачт, закрепления грунтовых откосов, подпорных стенок, а также для монтажных работ и для стабилизации строительных машин на время выполнения технологических операций. Общим недостатком, сдерживающим расширение области применения винтовых анкеров, являются большие крутящие моменты завинчивания их в грунт, а следовательно, высокая энергоемкость процессов завинчивания.
Также можно отметить отсутствие отечественных малогабаритных машин малой и средней мощности, использование которых целесообразно для завинчивания небольших винтовых анкеров, а также для работ в стесненных условиях. Эффективным решением данной проблемы является оснащение базовых машин легким и малогабаритным навесным оборудованием для завинчивания анкеров. Кроме того, современные строительные машины могут быть оснащены оборудованием для экспресс-анализа несущей способности винтовых анкеров сразу после погружения.
Поскольку винтовые анкеры имеют сравнительно низкие скорости завинчивания в грунт, механизмы завинчивания требуют применения редукторов с очень большими передаточными отношениями. При этом к навесным механизмам завинчивания предъявляются требования малых габаритов и массы при высоком коэффициенте полезного действия. В этом случае весьма эффективным решением является применение многоступенчатых планетарных редукторов, но при проектировании таких редукторов возникает многовариантная задача выбора числа ступеней, распределения общего передаточного отношения между ступенями и выбора параметров каждой ступени с учетом указанных выше критериев, которая может быть наилучшим образом решена только методами многокритериальной оптимизации.
В связи с вышесказанным актуальными являются задачи исследования на оптимальность параметров винтовых анкеров и редукторов приводов вращения, направленные на снижение энергоемкости процесса завинчивания винтовых анкеров в грунт.
Цель работы - снижение энергоемкости процесса завинчивания винтовых анкеров в грунт за счет оптимизации параметров винтовых анкеров и редуктора привода вращения.
Для достижения поставленной цели должны быть решены следующие задачи:
- Провести анализ существующих машин и оборудования для завинчивания винтовых анкеров в грунт.
- Разработать математические модели процессов взаимодействия винтовых анкеров с грунтом.
- Провести экспериментальные исследования процессов взаимодействия винтовых анкеров с грунтом и оценку адекватности полученных математических моделей.
- Разработать математическую модель оптимизации винтовых анкеров, методику и алгоритм определения оптимальных параметров винтовых анкеров по критерию минимальной энергоемкости завинчивания их в грунт.
- Разработать методику и алгоритм определения оптимальных параметров редуктора привода вращения по критериям максимального коэффициента полезного действия и минимальных массы и габаритных размеров.
Объект исследования - технологическая система рабочее оборудование машины - винтовой анкер - грунт.
Предмет исследования - процессы взаимодействия элементов данной системы при завинчивании и выдергивании винтового анкера.
4
Методы исследования. Задачи диссертационного исследования решены на основе методов математического моделирования процесса завинчивания винтового анкера в грунт с использованием научных положений теоретической механики, теории эвольвент-ного зубчатого зацепления, теории планетарных зубчатых передач, дифференциальной геометрии и механики грунтов, теории оптимизации, а также математической статистики при обработке экспериментальных данных.
Обоснованность и достоверность полученных результатов подтверждается корректностью допущений, принимаемых при разработке расчетных схем и математических моделей, применением современных апробированных методов исследования, численным анализом полученных результатов с использованием ЭВМ и программных продуктов для выполнения расчетов и обработки результатов экспериментальных данных, удовлетворительной сходимостью результатов теоретического и экспериментального исследований.
На защиту выносятся следующие основные научные положения, формирующие научную новизну работы:
- Математическая модель процесса взаимодействия винтового анкера с грунтом при завинчивании, включающая аналитические зависимости для определения крутящего момента завинчивания винтового анкера в грунт, осевых сил реакции грунта, осевой силы пригруза, отличающиеся более полным учетом всех геометрических параметров винтового анкера и стандартных физико-механических характеристик грунта.
- Аналитическая зависимость для определения предельной выдергивающей силы при осевом нагружении винтового анкера, впервые полученная теоретическим путем с учетом стандартных физико-механических характеристик грунта.
- Алгоритм определения оптимальных параметров винтовых анкеров по критерию минимальной энергоемкости завинчивания их в грунт с применением модифицированного метода Хука-Дживса, отличающийся тем, что процедура исследования построена как составной циклический процесс с различным для каждого параметра шагом, который включает в себя поэтапную одномерную оптимизацию целевой функции в направлении возможных изменений варьируемых параметров; при этом во избежание разрыва целевой функции проверку ограничений предложено выполнять в отдельных подпрограммах.
- Алгоритм определения оптимальных параметров редуктора привода вращения по критериям максимального коэффициента полезного действия и минимальных массы и габаритных размеров с применением принципа Парето и модифицированного метода целевого программирования для сужения области возможных решений, отличающийся тем, что позволяет для планетарных передач типа 2k-hс одновенцовым сателлитом определять оптимальные величины коэффициентов смещения зубчатых колес, а также включает в себя процедуру выбора оптимального числа ступеней редуктора и оптимального распределения общего передаточного отношения по отдельным ступеням.
Практическая значимость работы заключается в разработке методик определения оптимальных параметров винтовых анкеров и редуктора привода вращения, позволяющих уменьшить энергоемкость процесса завинчивания винтовых анкеров в грунт, и в определении теоретическим способом предельной выдергивающей силы при осевом нагружении винтового анкера.
Реализация результатов работы. На ЗАО "Научно-производственная фирма Авангард-Ф", г. Саратов, внедрена методика определения оптимальных параметров винтовых анкеров из условия минимальной энергоемкости завинчивания их в грунт. Результаты диссертационной работы используются также в учебном процессе при изучении дисциплины Строительные и дорожные машины, в курсовом проектировании при подготовке инженеров по специальности Наземные транспортно-технологические средства.
5
Апробация работы. Основные положения работы докладывались и обсуждались на заседаниях кафедры Подъёмно-транспортные, строительные и дорожные машины Балаковского института техники, технологии и управления СГТУ в 2010-2012 гг.; на II Всероссийской научно-технической конференции Информационные технологии, системы автоматизированного проектирования и автоматизация (Саратов, 2010); на научно-практической конференции молодых ученых (Балаково, 2011); на XXIV Международной научной конференции Математические методы в технике и технологиях (Саратов, 2011); на III Всероссийской научно-технической конференции Информационные технологии, автоматизация, системы автоматизированного проектирования промышленных систем и строительных объектов (Саратов, 2011); на V международной научно-практической Интернет-конференции Молодежь. Наука. Инновации (Пенза, 2012).
Публикации. По теме диссертации опубликовано 11 научных работ, из них 7 работ опубликованы в изданиях, рекомендованных ВАК РФ.
Структура и объём работы. Диссертация состоит из введения, 4 глав, заключения, библиографического списка из 156 наименований, приложений. Общий объём диссертации составляет 206 страниц, в том числе 81 рисунок и 11 таблиц.
КРАТКОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении обоснована актуальность и цель диссертационной работы, поставлены задачи, приведена общая характеристика работы с формулировкой её научной новизны и практической значимости.
В первой главе проведен аналитический обзор машин и оборудования, применяющихся для завинчивания винтовых анкеров в грунт, который позволил сделать вывод об отсутствии малогабаритных машин малой и средней мощности в отечественном машиностроении. Выявлена рациональная структура навесного механизма вращения, состоящего из гидромотора или электродвигателя и соосного планетарного редуктора, отличающегося высоким к.п.д. и малыми габаритами. Также выполнен анализ конструкций винтовых анкеров, позволивший выявить основные их конструктивные особенности и провести простейшую классификацию.
Установлено, что одним из основных недостатков существующих машин и оборудования, применяющегося для завинчивания винтовых анкеров в грунт, является высокая энергоемкость процесса завинчивания. Снижение энергоемкости может быть достигнуто проведением оптимизационных исследований параметров винтовых анкеров по критерию минимальной энергоемкости завинчивания их в грунт, а также параметров редуктора привода вращения по критерию максимального к.п.д. при учете критериев минимальных габаритных размеров и массы.
Также был проведен анализ научных исследований, посвященных взаимодействию винтовых анкеров с грунтом. Вопросами исследования и создания винтовых анкеров и свай, а также машин и оборудования для погружения их в грунт, занимались многие отечественные ученые и их коллективы: В.Д. Абезгауз, Л.Я. Богорад, В.Н. Железков, М.Д. Иродов, Б.Ю. Калинович, В.Т. Коломейцев, Ю.Н. Левицкий, Д.А. Лозовой, Л.Г. Мариупольский, И.Г. Мартюченко, В.А. Пенчук и др. Анализ работ вышеперечисленных исследователей показывает, что в основном они носили экспериментальный характер и были направлены на изучение взаимодействия с грунтом винтовых анкеров в процессе работы в сооружении, т.е. на определение влияния на их несущую способность различных факторов. Меньшую долю составляют экспериментальные и теоретические работы, связанные с исследованием влияния различных факторов на сопротивления погружению винтовых ан-
6
керов в грунт. Анализ существующих зависимостей показывает, что они не в достаточной мере учитывают влияние физико-механических свойств грунтов и геометрических параметров винтовых анкеров на сопротивления завинчиванию их в грунт.
Таким образом, оптимизация параметров винтовых анкеров и редуктора привода вращения является актуальной задачей, позволяющей снизить энергоемкость процесса завинчивания винтовых анкеров в грунт и расширить технические возможности машин данного назначения.
Вторая глава посвящена разработке математических моделей процессов взаимодействия винтовых анкеров с грунтом с последующей разработкой методики и алгоритма определения оптимальных параметров винтовых анкеров, обеспечивающих минимальную энергоемкость завинчивания их в грунт.
Поскольку винтовые анкеры характеризуются большим числом геометрических параметров, большинство из которых взаимно увязаны, и при их выборе необходимо учитывать значительное количество ограничений, проектирование анкеров вьшолняется, как правило, на базе известных конструкций с учетом рекомендаций по выбору геометрических параметров, полученных на основе данных об эксплуатации винтовых анкеров. Однако с учетом современного уровня развития ЭВМ стало возможным ставить задачу оптимального проектирования винтовых анкеров. Поскольку основным недостатком винтовых анкеров и машин для завинчивания винтовых анкеров в грунт является высокая энергоемкость завинчивания, актуальным является вопрос подбора таких параметров анкеров, при которых обеспечивается наименьшая энергоемкость процесса завинчивания.
|

Основным фактором, определяющим энергоемкость завинчивания винтовых анкеров в грунт, является величина крутящего момента, необходимого на преодоление сопротивлений грунта внедрению элементов анкера. Процесс взаимодействия элементов винтового анкера с грунтом весьма сложен и многообразен, поэтому при разработке математических моделей и принятии расчетных схем были приняты следующие общие допущения:
- осевое перемещение винтового анкера за один оборот завинчивания в грунт равно геометрическому шагу винтовой лопасти;
- грунт изотропен и является однородной средой, сплошным образом заполняющей пространство вокруг винтового анкера;
- винтовой анкер - недеформируемое тело, характеризуемое линейными и угловыми параметрами;
-а нормальное давление грунта равномерно рас
пределено по поверхности винтовой лопасти;
- коэффициент/трения о грунт поверхностей всех
элементов анкера одинаков и постоянен.
В работе рассматривается конструкция винтового анкера, доказавшая свою эффективность и получившая широкое распространение в строительстве и строительных машинах (рис. 1). Такая конструкция позволяет завинчивать анкер практически во все типы пластичных
грунтов без разрушения естественной структуры грунтоваа са бщая расчетная схема
г-гвинтового анкера: 1 - ствол;
и без необходимости приложения к анкеру дополнитель-аа т
wа г*ж> "а 2 Ч конусный наконечник;
ного осевого пригруза. 3_ винтовая лопасть
7
Основными параметрами винтового анкера являются: диаметр ствола d, диаметр D, шаг и толщина 8Л винтовой лопасти, угол 2ал конусности и число витков пк заходной части винтовой лопасти, число витков пц цилиндрической (несущей) части винтовой лопасти, угол 2ак конусности (или высота /гк) конусного наконечника ствола, начальный радиус Г\ винтовой лопасти.
Величина крутящего момента М завинчивания винтового анкера в грунт складывается из моментов, необходимых на преодоление сопротивлений внедрению в грунт отдельных его элементов:
М=М\ +М +Мкр +МК +МСТ,(1)
гдеаа Мд - момент сопротивления на верхней поверхности винтовой лопасти;
Мд - момент сопротивления на нижней поверхности лопасти (в случае погружения
анкера без дополнительного пригруза данной составляющей можно пренебречь); Мщ, - момент сопротивления внедрению кромки винтовой лопасти; Мк - момент трения конусного наконечника о грунт; Мст - момент сопротивления на боковой поверхности ствола анкера. В установившемся режиме завинчивания в грунт без активного осевого пригруза наблюдается равновесия осевых сил, действующих на отдельные элементы анкера:
Ga+F* = ^кр + ^к + ^ст >аа (2)
гдеа Ga - сила тяжести анкера;
F* - сила на верхней поверхности винтовой лопасти;
Fi<p - сила сопротивления внедрению кромки винтовой лопасти;
FK - сила сопротивления внедрению конусного наконечника;
FCT - сила сопротивления на боковой поверхности ствола анкера.
В результате разработки математической модели были получены аналитические зависимости для всех составляющих крутящего момента и осевых сил, учитывающие геометрические параметры винтового анкера и физико-механические свойства грунта.
Момент и осевая сила сопротивления внедрению кромки винтовой лопасти (рис. 2):
Мкр = J(d7V Х cosG + dNж г ж sinG) = qж tg2^ -(А-п^+В-п^+С-щ.),(3)
L
FKP=!dFa=f-4-t-nK,(4)
L
гдеа q- удельная сила внедрения кромки в грунт;
пк - число витков конической (заходной) части лопасти;
A = -%-f-t2; 3
B=2K.f.t.rl + l_t2.
tgc^аа 2
С_2ж-/-Г2 |аа /Х/-!а /-/2.
tg2^ tgc^аа Зтг Г\ - начальный радиус конической (заходной) части лопасти.
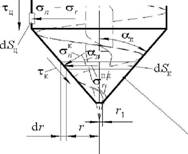
Момент и осевая сила сопротивления внедрению конусного наконечника винтового анкера в грунт (рис. 3):
|
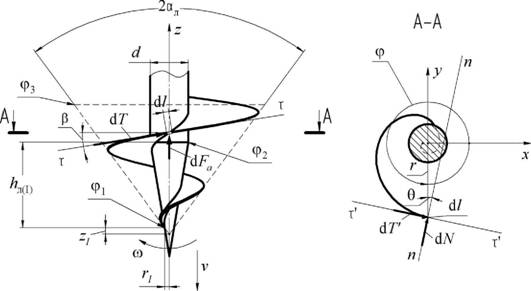
Рис. 2. Расчетная схема для определения сопротивлений на кромке винтовой лопасти
0.5d
Мк=аа J (f-<rД)x-r----------
оа к
![]() Аж/аг
Аж/аг
sin 2аД
-V(0,25u?2 +^2)3 +-/-Ar-tgorK -й?2 +г2((/-tgaK)2 -l)^0,25d2+k2 + (5)
3 8
+ гJ
2 ^
--(/ХtgaK)2аа + k3f-tgaK((f-tgaK)2-l)-hi
у |
V-5
V
0,25d2+г2 -k-f-tga^ k-(l-f-tgaK)
ж + |
sinaKа cosaK |
0.5d
с.27ГГ&Г 2шг
0 /Х* yCOSQrKy |
Fk=аа Jаа (o-/,-smaK+(/-o-Д)z) Ч
е, 1 \2аа f |
+ |
ХIn |
0,25d2+г2 -f-k-tga^ k-f-k-tgaK
dz
ж +
/ж*
yCOSQrKy
0,25u?2+г2 -?
к |
sin a
(6)
где k =
t
27I-COS0U
|

У
<5r- радиальное напряжение на поверхности конусного наконечника.
А А
г |
-ш
[OL
, 0
Рис. 3. Расчетная схема для определения сопротивлений на конусном наконечнике
Момент и осевая сила сопротивления на боковой поверхности ствола (рис. 4)
d 1аа n2d3 |
2 2 |
2d2+t2 |
Мст = jj dr-cos(3-- =
s
жЕ(/с,-Л),
V)
FCT=JJd7'-smp = -j44;=-Z(/cл-*r-), |
(8) |
2j2аа ,
л/тг |
Sаа ^TiAd^+r
fci=к' fi ~ средняя величина удельного сопротивления на стволе анкера для /-го слоя грунта; fi- расчетное сопротивление /-го слоя грунта на боковой поверхности ствола при
работе анкера, принимаемое согласно СНИП 2.02.01-85 в зависимости от типа и свойств грунта и глубины его залегания;
к - коэффициент условий работы; к = 1,0 для пластичных грунтов (глины и суглинки малой и средней плотности с консистенцией IL> 0,4) и к = 0,8 для плотных грунтов (глины и суглинки с консистенцией IL< 0,4); hj- мощность /-го слоя грунта, м.
|

Рис. 4. Расчетная схема для определения сопротивлений на стволе винтового анкера
Момент сопротивления и осевая сила на рабочей поверхности винтовой лопасти (рис. 5):
гдеа рв - удельное давление грунта на поверхность лопасти, определяемое из условия (2) с учетом (4), (6), (8), (10);
ф! - полярный угол лопасти, соответствующий началу конической лопасти на конусном наконечнике (ф Ф 0 вследствие того, что вершина конуса, описанного вокруг кромки лопасти, не совпадает с острием конусного наконечника ствола); ф2 - полярный угол лопасти, соответствующий переходу конической лопасти с конусного наконечника на цилиндрическую часть ствола;
фз - полярный угол лопасти, соответствующий переходу конической лопасти в цилиндрическую (несущую) лопасть.
|

d^-cosp+cLV-sinp |
Рис. 5. Расчетная схема для определения момента сопротивления и осевой силы на рабочей поверхности винтовой лопасти анкера
Для обеспечения процесса завинчивания анкера без нарушения естественной структуры грунта необходимо вьшолнение требований отсутствия буксования анкера в грунте и проскальзывания (погружения без вращения). Вьшолнение первого условия в некоторых случаях невозможно без приложения к анкеру осевой силы Qдополнительного пригруза, развиваемого машиной. Выбор минимальной осевой силы пригруза <2mw необходимо производить из условия, чтобы осевая сила, передаваемая верхней поверхностью винтовой лопасти анкера на грунт, не превышала осевой силы сопротивления грунта срезу по граничным поверхностям винтовой лопасти, или
гдеа Fcp- осевая сила сопротивления грунта срезу по граничным поверхностям лопасти. Для определения Fcp была составлена расчетная схема (рис. 6) и на основе известной зависимости Кулона для напряжений сдвига грунта и теоретических зависимостей Ф.К. Лапшина и Л.С. Лапидуса для нормальных радиальных напряжений в уплотненном грунте вокруг цилиндрического тела, вдавливаемого в грунт, получено аналитическое выражение:
11
^ср = IK Х cosc^ dSK+ {{тц dS4=
Е
4c-coscp-(l-|u )
hi
2
1 Ч? (1 + Sin(p)-7I-C-U?а SX
(12)
1 |
1-cosa |
4+i_r4+i |
>S |
(Z) |
x |
+ TZ-C- |
^cа cosou
t-n^-D^+
2-tganаа l + га vа L '\tgan
гдеа ?" - модуль деформации грунта в зоне среза; с - удельное сцепление грунта; ф - угол внутреннего трения грунта; [х - коэффициент поперечного расширения грунта;
-(0,25D2-r{),
^ = tg^
45-^
коэффициент активного сопротивления грунта.
![]()
 цилиндрическая
цилиндрическая
поверхность среза
грунта
D
ца пл|а 7г- Ч____
граница
пластической области
|

уплотнения грунта
коническая
поверхность среза
грунта
Рис. 6. Расчетная схема к определению сопротивлений грунта срезу по граничным поверхностям винтовой лопасти
Максимально допустимое значение осевой силы дополнительного пригруза определяется из условия отсутствия проскальзывания анкера в грунте:
паа <F + Fа + F4+Fаа -G(13)
SSmax ^1 к ~1 к.л.а 1 cp ~1 ста wa ' Vx-v
гдеаа F^ - осевая сила сопротивления грунта срезу по граничной цилиндрической поверхности лопасти;
14
Е |
2аа D
(14) |
1 ср |
4-1' |
Х(1 + 8Пф)-7-С-/-йц
Х1
d |
Ас ж coscp Х (1 - ц )
FK+FKJ1 - суммарная осевая сила сопротивления внедрению конусного наконечника ствола и винтовой лопасти;
/Г 1ё(ал+ф) 7Г---------- <ТД----------------------- |
4а I МП/. _а -I- III I
F +F 1к ~ * к.л. |
sina, |
(15)
Для проектирования специального оборудования строительных машин, предназначенного для экспресс-анализа несущей способности винтовых анкеров сразу после их по-
12
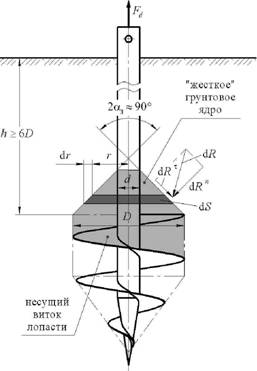
гружения в грунт, необходимы зависимости, позволяющие определить предельное значение выдергивающей силы при осевом нагружении винтового анкера. На основании известных сведений из теории предельного напряженного состояния грунтов о том, что несущая способность винтового анкера глубокого заложения определяется сопротивлением грунта перемещению уплотненного ядра, имеющего форму усеченного кругового конуса с углом конусности 2ая ~ 90 (рис. 7), предложена аналитическая зависимость, позволяющая рассчитать предельную выдергивающую силу при осевом нагружении анкера:
0,5а? 0 j
гаа ,пИ .аа Т ,2кгОТ
td=аа Jаа (Каа Хsmail+R-cosaa) Ч----------- = As
0,5D щая
P
1 +
tg<P tgV
+ c-cosa0
(16)
ж^>2 |
жd2) |
где |
|
рабочая площадь несу-
щего витка винтовой лопасти;
р - давлениеа обжатия уплотненного ядра
К |
окружающим грунтом;
( |
Е |
X
Р
Х с ж (соэф + ctg<|)) - с ж ctg<|) .(17) 4c-cos<t>-(l-|iz)
Рис. 7. Расчетная схема к определению предельной выдергивающей силы при осевом нагружении винтового анкера глубокого заложения |
При инженерном проектировании винтовых анкеров возникает многовариантная задача выбора их геометрических параметров с целью обеспечения требуемой несущей способности, прочности, надежности и технологичности конструкции при минимальной энергоемкости процесса завинчивания их в грунт. Поскольку винтовые анкеры характеризуются большим числом геометрических параметров (многие из которых взаимно увязаны) и при их выборе необходимо учитывать значительное количество ограничений, эффективное проектирование винтовых анкеров должно выполняться с применением совместного исследования всех параметров на оптимальность.
Оптимизация параметров винтовых анкеров проводится по единому критерию, поэтому в качестве целевой функции будет выступать энергоемкость ЕзаВ процесса завинчивания винтового анкера в грунт:
2п
(18) |
Е, |
зав |
жYjMik =F(d,D,t,hK,rl,nK,nli,dJl),
t
гдеаа t- осевое погружение анкера за один оборот;
средняяаа величина |
м =Mli+мщ> +мш +мст =f(d,D,t,hK,rl,nK,nli,8J1)
крутящего момента для /-го слоя грунта;
hj- толщина /-го слоя грунта.
Как показано выше, величина крутящего момента М завинчивания винтового анкера в грунт является функцией глубины погружения, стандартных физико-механических характеристик грунта и геометрических параметров анкера, из которых независимыми являются: числа витков конической пк и цилиндрической пц частей винтовой лопасти, диаметры ствола dи винтовой лопасти D, шаг tи толщина 8Л винтовой лопасти, высота кони-
13
ческого наконечника ствола h^, начальный радиус Г\ конической части винтовой лопасти (через них однозначно рассчитываются остальные параметры).
Для того чтобы рационально назначить варьируемые при оптимизации параметры, были проанализированы все ограничения, имеющиеся при решении оптимизационной задачи. Общими ограничениями являются:
- обеспечение требуемой несущей способности винтового анкера;
- обеспечение прочности элементов конструкции анкера;
- обеспечение углов подъема винтовой лопасти, не превышающих угла трения поверхности винтовой лопасти о грунт.
Кроме того, в качестве дополнительных ограничений были приняты диапазоны рациональных значений геометрических параметров, полученных на основе рекомендаций В.Н. Железкова и Л.Я. Богорада к проектированию винтовых анкеров, за пределами которых нецелесообразно проводить поиск оптимума. Поскольку все диапазоны линейных параметров определяются по отношению к диаметру dствола, были введены безразмерные коэффициенты:
KDd=-7>аа Ktd=-;>аа Khd=-T>аа Krd=~J-(19)
Исходя из того, что несущая способность анкера определяется расчетной площадью
Ал несущего витка винтовой лопасти, для диаметра ствола было получено выражение:
d=\аа 4А2жа (20)
Таким образом, при исследовании целевой функции Е^ на экстремум, задаваясь значениями коэффициентов (19), можно однозначно найти все линейные геометрические параметры винтового анкера. Числа витков пк и пц могут свободно варьироваться в пределах заданных диапазонов. В отличие от действительных значений параметров, варьирование безразмерных коэффициентов (19) может производиться независимо друг от друга и без риска нарушения простых ограничений на параметры. При этом минимально необходимые толщины лопасти 8Л и ствола 8СТ можно подобрать из условий обеспечения прочности ствола на растяжение и кручение и лопасти на изгиб при заданных значениях вышеперечисленных параметрах, поэтому 8Л и 8СТ следует отнести к числу зависимых варьируемых параметров.
Таким образом, целевая функция является однозначной функцией варьируемых параметров:
Езав =F(KDd>Ktd>Khd>Krd>nn>nK>5J1),(21)
а оптимизация геометрических параметров винтовых анкеров является задачей нелинейного программирования с ограничениями.
Учитывая сложность и специфику задачи, а также то, что целевая функция определена как результат сложной цепи расчетов полученной математической модели, можно считать, что для решения данной задачи более удобными и эффективными окажутся численные методы оптимизации 0-го порядка (методы прямого поиска), не требующие вычисления производных целевой функции.
Алгоритм выбора оптимальных параметров составлен по модульному принципу и состоит из основной программы МРА и подпрограмм (процедур) FBP, Fthick, FIS, Fscan. Принципиальная схема алгоритма представлена на рис. 8.
Исходными данными на проектирование винтового анкера являются: величина требуемой несущей способности; физико-механические характеристики грунта по слоям (вид грунта (глинистый или песчаный), разновидность глинистых грунтов по пластичности
14
(глина, суглинок, супесь); объемный вес у; показатель текучести ILглинистого грунта; угол ф внутреннего трения; удельное сцепление с; модуль деформации Е; расчетное сопротивление/ грунта на боковой поверхности ствола анкера; коэффициент/трения поверхностей анкера о грунт); глубина погружения hнесущего витка лопасти анкера; материал винтового анкера и его свойства.
(аа Началоаа 1 |
Базы панных |
|||
I |
||||
/ характеристики грунта, / /а материал анкер / |
||||
1 |
||||
оп ? [vД]\xД ? [тД]; условия аварки |
Выбор нулевой базовой точки |
База данных по металлу |
||
1 |
||||
Исследование окрестности базовой точки |
||||
\ |
||||
2,5<КМ<5,0 |
Определение коэффициента диаметра попасти |
|||
1 |
||||
,,а , рсб гdаа гd |
Определение диаметра ствола анкера d |
|||
\ |
||||
0.66 <пх <0.75 |
Определение числа витков заходной части лопасти пк |
|||
1 |
||||
1,0 <иц < 1,25 |
Определение числа витков цилиндрической части лопасти |
|||
1 |
||||
0,75 </Сы <2 |
Определение ко'ффипиепк высоты конусного наконечника |
|||
1 |
||||
0.3<^<^ |
Определение коэффициента шага винтовой лопасти |
|||
1 |
||||
0,15 <?Д,< 0,5 |
Определение коэффициента начального радиуса лопасти |
|||
\ |
||||
Расчет геометрических параметров винтового анкера |
||||
\ |
||||
Расчет максимального крутящего момента чавинчивакия анкера в rpVHTl/,аа г |
||||
\ |
||||
ЖВа ,а ,аа ЖВ, |
Определение толщины лопасти |
База данных по металлу |
||
\ |
||||
<*я*[<ст];тя*[тет]; условия сварки |
-а - |
Определение толщины ствола 5,. |
База данных по металлу |
|
\ |
||||
Расчет минимально необходимой осевой силы дополнительного пригруза О..,. |
||||
1 |
||||
Вывод результатов |
||||
f Конеца 1 |
||||
Рис. 8. Принципиальная схема алгоритма оптимального проектирования винтового анкера
15
Основная программа МРА является управляющей и строится по модифицированному методу Хука-Дживса, отличающегося тем, что во избежание разрыва целевой функции проверка всех ограничений выполняется в подпрограммах. После того, как на основании исходных данных будут определены значения всех параметров и целевой функции в глобальной нулевой базовой точке в процедуре FBP, вызывается процедура FISисследования поведения целевой функции в окрестности базовой точки путем варьирования параметров KDci, п^, пц с заданными из основной программы шагами. Оператором сравнения определяется убывание целевой функции по сравнению с её базовым значением. Если убывания нет, то глобальная базовая точка не изменяется и вдвое уменьшаются шаги движения по всем параметрам, после чего снова производится исследование целевой функции на экстремум. Если функция уменьшилась, то значения параметров и целевой функции сохраняются и принимаются за новую глобальную базовую точку. Затем происходит исследование с уменьшенным вдвое шагом. Исследование прекращается, когда шаг исследования окажется меньше наперёд заданной малой величины. Таким образом, в результате исследования получаются значения геометрических параметров винтового анкера, обеспечивающие минимальную энергоемкость процесса завинчивания его в грунт.
Разработанный алгоритм оптимального проектирования имеет ряд особенностей. В алгоритм метода Хука-Дживса вводится модификация, заключающаяся в том, чтобы вместо изменения всех параметров по образцу, процедуру исследования строить как составной циклический процесс с различным для каждого параметра шагом, который включает в себя поэтапную одномерную оптимизацию целевой функции в направлении возможных изменений каждого из варьируемых параметров KDci, п^, пц. Исследование проводится до тех пор, пока оно даёт убывание локального базового значения целевой функции. Предлагается шаги параметров последовательно уменьшать в основной программе, а при каждом вызове подпрограммы FISисследования работать с постоянными, но различными для каждого параметра шагами. Это позволяет сократить число итераций и более точно подойти к точке оптимума.
Вследствие тесной взаимосвязи ограничений, налагаемых на выбор параметров Ktd, Khd, Krd, находить их оптимальные значения и производить проверку ограничений
предлагается в отдельной процедуре Fscan, построенной по методу сканирования с отсеканием конфигураций, не проходящих по ограничениям. При этом наименьшие толщины лопасти 8Л и ствола 8СТ для каждой конфигурации параметров KDd, Ktd, Khd, Krd,пц,пк
подбираются из условий обеспечения прочности в отдельной процедуре Fthick.
 Третья глава посвящена разработке методики и алгоритм оптимальногоаа проектированияаа редуктора
Третья глава посвящена разработке методики и алгоритм оптимальногоаа проектированияаа редуктора
привода вращения машИНЫ ДЛЯ ЗавИНЧИВанИЯ ВИНТОВЫХа \^_Уаа -... Двигатель
1-я ступень редуктора |
анкеров в грунт по критериям максимального к.п.д. и минимальных габаритных размеров и массы.
k-я ступень редуктора |
Ч |
Винтовой анкер |
Для навесного механизма вращения выбрана рациональная структура редуктора (рис. 9), представляющего собой одну или несколько соосных планетарных передач (ступеней), каждая их которых выполняется по схеме 2k-hтипа А (т.е. с одновенцовым сателлитом), наилучшим образом отвечающего указанным критериям и режиму работы машины.
Проектирование планетарных зубчатых передач
представляет собой многовариантную задачу выбора Рис. 9. Общая схема привода
основных параметров,а удовлетворяющейа требуемыма механизма вращения
16
кинематическим и динамическим условиям. Важнейшей задачей является выбор количества ступеней и распределение общего передаточного отношения редуктора по ступеням. Кроме того, при выборе наилучшего варианта приходится учитывать много различных взаимно противоречивых критериев.
Поскольку редукторы механизмов вращения винтовых анкеров относятся к силовым передачам, предназначенным для ежедневной многочасовой работы, важнейшим критерием качества данных редукторов является к.п.д. Помимо этого, для навесного оборудования весьма важными являются критерии массы и габаритов механизма завинчивания. Таким образом, задача проектирования редуктора механизма вращения является многокритериальной и может быть качественно решена только с применением методов многокритериальной оптимизации.
Вопросам многокритериальной оптимизации планетарных зубчатых передач с применением методов Парето и целевого программирования посвящены работы Н.М. Черновой, однако в них не рассматривались планетарные передачи 2k-hтипа А с одновен-цовыми сателлитами, а также не рассматривались вопросы определения оптимальных коэффициентов смещения зубчатых колес и оптимального распределения общего передаточного отношения по ступеням многоступенчатого редуктора, что является особенно актуальным при решении поставленных задач.
В качестве компонентов векторного критерия fiX) оптимальности приняты следующие основные характеристики редуктора: коэффициент полезного действия г| (взятый со знаком л-), масса mRи габаритные размеры Gредуктора:
МХ) = -Ц,аа fm = mR,аа /з(*) = а (22)
Таким образом, цель оптимального проектирования редуктора механизма завинчивания заключается в минимизации целевой функции j(X) = (f\(X), fi(X), /зОО) на множестве Xвозможных решений задачи.
Область Xвозможных решений задачи формируется на основе исходных данных путем изменения количества ступеней редуктора, изменения разбивки общего передаточного отношения по ступеням, варьирования чисел зубьев и коэффициентов смещения зубчатых колес каждой ступени при ограничениях, наложенных на точность получения передаточного отношения редуктора, на качественные и прочностные характеристики каждой проектируемой планетарной ступени, а также с учетом известных условий соосности, сборки и соседства.
Из области Xвозможных решений выбирается множество Парето-оптимальных решений Р/Х) согласно условию:
Р/(Х) = {х* Х\ не существует такого х X, что/(х) </(**),а (23)
причем хотя бы для одного критерия это неравенство строгое}.
Для выбора из множества Р/(Х) Парето-оптимальных решений подмножества Sel(X) наилучших решений (в идеальном случае - одного решения) применяется модификация метода целевого программирования. Сначала на основе множества Pf(X) формируется так называемый идеальный вектор U, состоящий из минимальных значений компонентов векторного критерия/
Uа а\JXminiJ 2mimJЪтт )ХVа /
Для каждого решения х, Р?Х) е Xрассчитывается метрика р(х7), представляющая собой неотрицательное число и выражающая расстояние критериального вектора Дх7) до идеального вектора U. Величина метрики для каждого решения х7 в данном случае определяется по формуле:
/mm Vt7 |
Jii ~ J
/=1а L//'min |
В качестве оптимального выбирается решение, расположенное как можно ближе к идеальному вектору U, т.е. решение, имеющее наименьшую метрику р. Возможны случаи, когда несколько решений получат одинаковые значения метрики р(х7). Тогда окончательное решение по выбору наилучшего варианта остается за конструктором.
Для решения задачи оптимального проектирования многоступенчатого планетарного редуктора разработана методика и алгоритм. Алгоритм построен по модульному принципу и включает в себя основную программу MPR, которая является управляющей, и подпрограмм ST, SaveR, SaveSTJ, ParR, ParST, GeomR, Module, Masscalc, Effcalc, PS, ParetoScan, Vector, Metric, SearchOpt. Принципиальная схема алгоритма представлена на рис. 10.
fа Началоа 1 |
Базы данных |
||||
/ и, Aflinl nehiVj/ режим работы,аа / /аа материалыа / |
|||||
'^>Д^ |
Выбор количества ступеней редуктора |
||||
2,7 <ат<Ъ;\1<20 |
Раинределение передаточного отношения по ступеням редуктора |
||||
2 - кЯ1 <, 5 |
Выбор числа сателлитов в каждой ступени |
||||
\ < 0,04; z""1 <%< гЩ*; условия соосности, сборки, соседства |
Выбор чисел зубьев колёс каждой ступени |
||||
Xf< 2,0; > 1,2; отсутствие подрезания и заострения зубьев; условия соосности, соседства |
Выбор коэффициентов смещения колес каждой ступени |
||||
0,1 <ч<0,18ч* 0,75 |
Выбор ща- для неподвижного колеса каждой ступени |
||||
5ДS[flH];ori[a,] |
Определение модуля колес каждой ступени |
я(СТСЭВЗ]0-7б ) |
|||
и(, = wjl условия отсутствия интерференции уйьеп я рабочих те станочных закпгсенпях колеси с пгг-трелгтмт] 'опьяни |
Выбор стандартного доибяка для нарезания колеса с внутренними зубьями |
Ч |
[СТ. СЭВ 277-76, ГОСТ 9323-60) |
||
Расчет к.п.д., габаритов и массы редуктора |
|||||
РЛрС\ = (' J не ьущест.уйгт?ьпго е, что r^.v] ^jf(.K*)t причем хотя бы для одного крпнрвя эго нграягвЕо строгое) |
Формирование области П а рети -оптимальных решений |
J^)-/WOsU5(flU<J5 |
|||
Определение идеального веътора V п расчет метрики p(.v] для калезого Парето-опишального рехкеннч |
Р/Я |
||||
Выбор оптимального решения |
*0 |
||||
Расчет всех недостающих параметров для оптимального варианта |
|||||
Вывод результатов |
|||||
fаа Конецаа ) |
|||||
Рис. 10. Принципиальная схема алгоритма оптимального проектирования многоступенчатого планетарного редуктора
18
Исходными данными для работы алгоритма являются: режим работы привода вращения, крутящий момент на выходном валу редуктора Мвых (определяемый крутящим моментом М завинчивания винтового анкера), частота вращения выходного вала wBbIX (определяемая требуемой частотой вращения анкера), общее передаточное отношение и редуктора, марка стали зубчатых колес, способ обработки поверхностей зубьев колес.
Для формирования области Xвозможных решений задачи, т.е. массива параметров (П, mR, G, ?ступ, (za)h (zg)i, (zb)h (xa)i, (xg)i, (хь)ь (ksa^ вариантов редукторов, для которых выполняются все ограничения, внешний цикл алгоритма в основной программе MPRпостроен на изменении количества планетарных ступеней кступ и изменении передаточных отношений щ каждой ступени. Оптимальные значения чисел зубьев, коэффициентов смещения и модуля зубчатых колес, количество сателлитов, а также величина к.п.д., массы и габаритных размеров каждой ступени определяются подпрограммой STи её процедурами при условии обеспечения передаточного отношения, вьшолнения условий соосности, сборки и соседства, условий отсутствия интерференции в станочных и эксплуатационных зацеплениях колес, условия по минимальному коэффициенту перекрытия в зацеплениях, прочностных ограничений.
После формирования области Xвозможных решений основная программа MPRобращается к подпрограмме PSдля отыскания оптимального варианта редуктора в области возможных решений. Подпрограмма PSявляется управляющей для нескольких процедур и работает следующим образом. На полученной области возможных решений Xс помощью процедуры ParetoScanформируется область Р/Х) Парето-оптимальных решений по условию (23). Затем на множестве Р/Х) с помощью процедуры Vectorформируется идеальный вектор Uсогласно условию (24). Далее вызывается процедура Metric, служащая для расчета значений метрики р по формуле (25) для каждого Парето-оптимального решения. Завершается работа подпрограммы PSотысканием оптимального варианта решения, имеющего минимальное значение метрики р (процедура SearchOpt) и передачей данных в вызывающую программу.
На заключительном этапе работы основной программы MPRдля оптимального варианта редуктора производится расчет всех геометрических параметров ступеней редуктора (процедура GeomR).
В четвертой главе представлена методика и программа проведения экспериментов, описано оборудование и характеристика грунтовых условий, приведены результаты экспериментальных исследований.
Основной целью экспериментальных исследований являлось определение крутящего момента завинчивания винтовых анкеров в грунт и предельной выдергивающей силы при осевом нагружении анкера и проверка адекватности полученных аналитических зависимостей (1)-(10) и (16). Экспериментальные исследования проводились в полевых условиях на нескольких площадках естественного грунта в осенний период. Основные физико-механические и классификационные характеристики грунтов определялись в соответствии с требованиями соответствующих ГОСТов.
Для экспериментальных исследований были изготовлены два винтовых наконечника (рис. 11 а) со следующими основными параметрами:
- диаметр несущего витка лопасти D= 100 мм;
- диаметр ступицы винтового наконечника d= 22 мм;
- шаг винтовой лопасти t= 30 и 40 мм;
- угол конусности заходной части винтовой лопасти 2ал = 100;
- угол конусности наконечника ступицы 2ак = 50.
19
Также были изготовлены два тяжа длиной 0,6 и 1,0 м с приваренным шестигранником под ключ и рымом. Винтовой анкер в сборе показан на рис. 116.
|
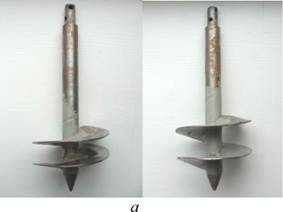
Ф
Рис. 11. Винтовые анкеры: а - винтовые наконечники; б - винтовой анкер в сборе
Завинчивание винтовых анкеров в грунт с измерением крутящего момента производилось вручную при помощи тарированного динамометрического ключа. Для проведения исследований процесса вьщергивания винтовых анкеров из грунта была изготовлена специальная экспериментальная установка (рис. 12, 13). Выдергивание анкеров производилось с помощью реечного домкрата, а измерение осевого усилия выдергивания - тарированным динамометром. Для измерения величины перемещения винтового анкера в процессе вьщергивания из грунта на опоре домкрата закреплялась металлическая линейка и индикатор часового типа.
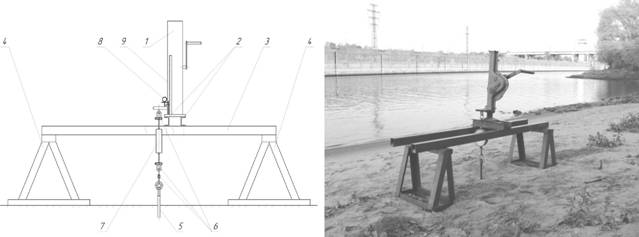
Рис. 12. Схема экспериментальной установки:аа Рис. 13. Общий вид экспериментальной установки
1 - домкрат реечный; 2 - поперечные швеллеры;
3 - балки; 4 - козловые опоры; 5 - винтовой анкер;
б - соединительные элементы (скобы, петли,
талрепы); 7 - динамометр;
8 - индикатор часового типа; 9 - инейка
Программа исследований предусматривала две серии экспериментов.
20
Первая серия проводилась с целью сопоставления данных по величине крутящего момента, определенных с помощью аналитических выражений (1)-(10), с данными, полученными в ходе экспериментов. После обработки результатов первой серии экспериментов получен ряд зависимостей, представленных в виде диаграмм (рис. 14) изменения крутящего момента по глубине завинчивания анкера, для различных грунтовых условий. Среднее квадратичное отклонение экспериментальных значений для данных опытов не превышает 4,5 Нм. На графиках также представлены расчетные значения крутящего момента, определенные по предлагаемым аналитическим зависимостям (1)-(10).
0
-10
-20
-30
-40
-50
-60
-70
-80
-Э0
-100
-110
-120
10 20 30 40 50 60 70 80 90
Ту |
Ча у |
|||||||
V \: |
/ |
|||||||
Л |
\ |
s^_ |
||||||
-Л |
\ |
2 |
\ 1 |
|||||
Vv |
/ |
\\, |
||||||
^ |
||||||||
1\ |
Vа Ч а 1 |
|||||||
-, |
||||||||
^Ь |
||||||||
1. Глина полутвердая (IL= 0,1 3; w= 24 %; р=1,9 г/см3; е = 0,80; с= 130кПа;ср = 20; Е = 30 МПа;/ = 0,58)
2. Песок мелкий (ID= 0,95; w= 3,8 %;р= 1,62 г/см3; е = 0,70; с = 4 кПа; ср = 34; Е = 35 МПа;/ = 0,72)
1. Глина полутвердая (IL= 0,15; w= 25 %; р = 1,95 г/см3; е = 0,79; с = 135 кПа; ср = 21; Е = 32 МПа; / = 0,58)
2. Песок мелкий (7д = 0,99; w= 5,0 %; р = 1,68 г/см3; е = 0,67; с = 4 кПа; ср = 35; ? = 36 МПа; /= 0,72)
жсогласно эксперименту --*--по предлагаемым зависимостям
Рис. 14. Сопоставление расчетных и экспериментальных значений крутящего момента погружения винтового анкера (D= 100, d= 22 мм, = 30 мм) в глинистом (1) и песчаном (2) грунте
Вторая серии экспериментов была направлена на определение предельного значения выдергивающей силы при осевом нагружении винтового анкера глубокого заложения с целью сопоставления с расчетными значениями, полученными по аналитическому выражению (16). После обработки результатов экспериментов получен ряд диаграмм изменения усилия вьщергивания винтового анкера от перемещения для различных грунтовых условий (рис. 15). Среднее квадратичное отклонение экспериментальных значений для данных опытов не превышает 159,4 Н. Затем значения, вычисленные по предлагаемому аналитическому выражению (16), сравнивались с максимальными значениями осевой выдергивающей силы, определенными по соответствующим диаграммам.
Проведенные экспериментальные исследования подтвердили достоверность теоретически полученных зависимостей в различных грунтовых условиях. Отклонения расчетных значений от экспериментальных данных не превышают 20% для крутящего момента и 14% для предельной осевой выдергивающей силы.
21
0 гЧ 0 |
110 100 90 80 70 60 50 40 30 20 10 |
Е
п |
|||
п |
|||
п |
|||
/ |
|||
/ |
|||
у |
|||
/ |
|||
f |
>-' |
||
Г |
^ |
||
1000 |
2000 |
3000 |
4000
Суглинок полутвердый
к = 0,03
w = 20,6 %
р= 1,9 г/см3
е = 0,65
с = 48 кПа
Ф= 18
Е = 22 МПа
Величина предельной осевой выдергивающей силы анкера:
- по аналитической зависимости (20) - 4469 Н;
- согласно эксперименту - 3920 Н.
^,н
Рис. 15. Зависимость осевой выдергивающей силы от перемещения анкера в глинистом грунте (глубина погружения лопасти h= 0,6 м; параметры анкера D= 100 мм, d = 22 мм, t = 30 мм)
ОСНОВНЫЕ ВЫВОДЫ И РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЯ
В диссертации решена научно-практическая задача по снижению энергоемкости процесса завинчивания винтовых анкеров в грунт за счет оптимизации параметров винтовых анкеров и редуктора привода вращения. Результаты решения этой задачи представлены в следующих выводах.
- На основании анализа состояния вопроса выявлены наиболее перспективные конструкции винтовых анкеров, определена рациональная структура механизма завинчивания в виде гидромотора (или электродвигателя) с многоступенчатым планетарным зубчатым редуктором, ступени которого вьшолняются по схеме 2k-hтипа А (с одновенцовым сателлитом).
- В результате проведения теоретических исследований получены аналитические зависимости (1)-(17), позволяющие определить крутящий момент, необходимый на завинчивание винтового анкера в грунт; осевые силы реакции грунта, действующие на анкер при завинчивании; необходимую осевую силу пригруза для завинчивания анкера; предельную вьщергиваюшую силу при осевом нагружении винтового анкера, отличающиеся более полным учетом геометрических параметров винтового анкера и физико-механических свойств грунта. Численный анализ полученных теоретических зависимостей показал, что при прочих равных условиях зависимость крутящего момента М от диаметра Dи шага tвинтовой лопасти, а также от коэффициента/трения анкера о грунт, нелинейная. Наибольшее влияние на величину крутящего момента М оказывает диаметр dствола и угол заострения 2ак конусного наконечника ствола. В зависимости от геометрических параметров анкера и грунтовых условий оптимальная величина угла заострения 2акопт конуса ствола варьируется в диапазоне 40.. .60.
- Экспериментальные исследования подтвердили адекватность полученных аналитических зависимостей. Установлено, что величины крутящего момента, необходимого
22
для завинчивания винтовых анкеров в грунт на требуемую глубину, отличаются от расчетных значений не более чем на 20%, причем погрепшость снижается с увеличением глубины завинчивания. Величина предельной осевой силы, необходимой для выдергивания винтовых анкеров, отличается от расчетных значений не более чем на 14%.
- Разработана математическая модель оптимизации, а также методика и алгоритм определения оптимальных параметров винтовых анкеров по критерию минимальной энергоемкости процесса завинчивания их в грунт с применением модифицированного метода Хука-Дживса. В алгоритм метода Хука-Дживса введена модификация, заключающаяся в том, чтобы вместо изменения всех параметров по образцу, процедуру исследования строить как составной циклический процесс с переменным для каждого параметра шагом, который включает в себя поэтапную одномерную оптимизацию целевой функции в направлении возможных изменений варьируемых параметров. Вследствие тесной взаимосвязи ограничений, налагаемых на выбор параметров, предложено проверку ограничений производить в отдельных подпрограммах, построенных на основе метода сканирования.
- Разработана методика и алгоритм определения оптимальных параметров редуктора привода вращения по критериям максимального коэффициента полезного действия и минимальных массы и габаритных размеров на основе принципа Парето с применением модифицированного метода целевого программирования для сужения области возможных решений. Полученный алгоритм отличается тем, что позволяет для многоступенчатых редукторов, составленных из планетарных передач типа 2k-hс одновенцовым сателлитом, определять оптимальное число ступеней и выполнять оптимальное распределение общего передаточного отношения редуктора по ступеням, а также определять оптимальные величины коэффициентов смещения зубчатых колес.
- Оценка эффективности применения разработанных методик оптимального проектирования показала: а) оптимизация параметров винтовых анкеров с диаметрами винтовой лопасти 500 мм и ствола 168 мм по критерию минимальной энергоемкости завинчивания при глубине погружения 3 м позволяет снизить энергоемкость на 12,3 % при завинчивании анкеров в плотный водонасыщенный песчаный грунт и на 14,3 % - в полутвердую тяжелую глину по сравнению с базовым винтовым анкером ВАС-50; б) многокритериальная оптимизация планетарного редуктора привода вращения позволила на 1,4% повысить к.п.д. редуктора и на 19,5 % уменьшить его массу по сравнению с базовым серийным планетарным редуктором 5П-125М-160-12000.
Основные положения диссертации опубликованы в следующих работах:
Научные издания из перечня ВАК РФ
- ебедев, СВ. Оптимизационные исследования механизма главного подъема полярного крана КМ 320/160/2x70 Балаковской АЭС / Н.М. Чернова, СВ. Лебедев // Известия ТуГУ. Технические науки. - 2009. - Вып. 2 (часть 1). - С. 267-273.
- ебедев, СВ. Момент и сила сопротивления внедрению кромки лопасти конического винтового якоря в грунт / Вестник СГТУ. - 2010. - №3(48). - С. 60-64.
- ебедев, СВ. Сопротивление внедрению конусного наконечника винтовой сваи в грунт / Н.Е. Ромакин, СВ. Лебедев // Строительные и дорожные машины. - 2011. - №2. -С. 36-39.
- ебедев, СВ. Момент и сила на поверхности лопасти конического винтового якоря / Вестник машиностроения. - 2011. - №5. - С. 6-9.
- ебедев, СВ. Крутящий момент завинчивания конического винтового якоря в грунт / Вестник СГТУ. - 2011. - №2(55). - Вып. 1. - С. 79-87.
23
- ебедев, СВ. Сопротивление завинчиванию винтовой сваи в грунт / Н.Е. Рома-кин, СВ. Лебедев // Строительные и дорожные машины. - 2011. - №9. - С. 37-42.
- ебедев, СВ. Определение необходимой осевой силы пригруза, развиваемой машиной для погружения винтовых якорей в грунт / Мир транспорта и технологических машин. - 2012. - №1(36). - С. 71-79.
Работы, опубликованные в международных сборниках
- Lebedev, S.V. Torque and Axial Force at the Surface of a Blade in a Conical Helical Anchor / Russian Engineering Research. - 2011. - Vol. 31. - No. 5. - pp. 424-427. - ISSN 1068-798X (й Allerton Press, Inc., 2011).
- ебедев, СВ. Математическая модель определения крутящего момента завинчивания винтовых свай в грунт / Математические методы в технике и технологиях - ММТТ-24 : сборник трудов XXIV международной научной конференции, г. Киев, 31 мая-2 июня 2011 г. : в 10 т. -Киев, 2011. -Т. 5. - С. 124-126.
Работы, опубликованные в региональных сборниках
- ебедев СВ. Оптимальный угол заострения ступицы винтового якоря / Информационные технологии, САПР и автоматизация : сборник научных трудов II Всероссийской научно-технической конференции, посвященной 80-летию Саратовского государственного технического университета. - Саратов, 2010. -С. 141-147.
- ебедев СВ. К определению параметров рабочего органа машины для завинчивания винтовых якорей в грунт / Информационные технологии, автоматизация, САПР промышленных систем и строительных объектов : сборник научных трудов III Всероссийской научно-технической конференции. - Саратов, 2011. - С. 93-98.
24
ебедев Сергей Владимирович
ОБОСНОВАНИЕ ОПТИМАЛЬНЫХ ПАРАМЕТРОВ ВИНТОВЫХ АНКЕРОВ И РЕДУКТОРА ПРИВОДА ВРАЩЕНИЯ
Автореферат
Подписано в печать 29.05.2012.
Формат 60x84 Vi6. Бумага офсетная. Печать цифровая.
Усл. печ. л. 1,0.аа Уч.-изд. л. 1,5. Тираж 120 экз. Заказ 48-4718..
Отпечатано в ИД Политехник
346428, г. Новочеркасск, ул. Просвещения, 132
Авторефераты по темам >>
Разные специальности - [часть 1] [часть 2]