
 Все научные статьи
Все научные статьи
азарюк А.Ю., Пономарев В.И. Согласование вертикальных профилей CTD-зондирования с целью устранения ложной структуры солености в слое скачка температуры
Научная статья
Электронный журнал ИССЛЕДОВАНО В РОССИИ
1а dCm(t)
ваа са dt
В практических руководствах большинства CTD-зондов рекомендовано поддерживать скорость движения зонда в пределах 1м/с [8-10]. В этом случае xtTc при тс^0 [1-3], и псевдоструктура профиля Sm(t) обусловлена главным образом инерционностью ДТ:
AS(t) |
гф dTm(t)
в*а dt
или с учетом пространственного распределения температуры:
(9)
Электронный журнал ИССЛЕДОВАНО В РОССИИ
ЯЯ- |
||
^Sr |
||
V} о- |
||
0/L.Z3 ж |
||
3?8- |
||
1.02605
0.0а 0.5а 1.0аа -
в/ г/
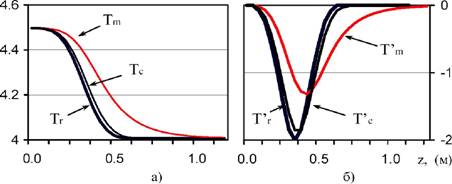
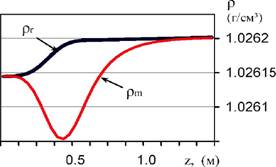
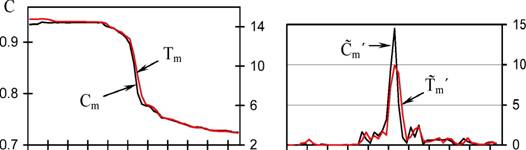
Рис. 2. Профили температуры (а), градиента температуры (б), солености (в) и плотности (г), заданные (Tr(z), T'r(z) и Sr(z)) и полученные при моделировании измерительного процесса датчиками CTD-зонда Mark ШС (Tc(z), T'c(z) при Ti=0,04c, Cm(Tc); Tm(z), T'm(z) при т2=0,16с, а также Sm(Cm,Tm) и pm(Sm,Tm))
При расчете профиля солености Sm=(Cm,Tm) и плотности pm=p(Sm,Tm), появляются ложные минимумы солености и плотности, показанные на рис. 2в и 2г. В данном характерном случае ложный выброс солености составляет около 0,15%о, а плотности 0,1*10^г/см3. Аналогичные структурные расхождения при наличии температурной градиентной прослойки (ТГП) наблюдаются и в реальных CTD-данных, полученных как с помощью приборов серии Mark III, так и других CTD-зондов [1, 3, 5, 6, 11, 12, 14].
4.аа Методы устранения рассогласованности температуры и электропроводности с целью подавления псевдоструктуры солености
Чтобы уменьшить ложную структуру солености необходимо устранить первопричину -инерционную рассогласованность основных датчиков CTD-зонда. Существуют различные подходы для решения этой проблемы, основанные на совершенствовании, как измерительных технических средств, так и методов обработки сигналов датчиков.
Из рассмотренного ранее модельного примера следует, что инерционный эффект каждого датчика подобен экспоненциальной фильтрации реальных профилей. Поэтому инерционную рассогласованность датчиков зонда можно уменьшить путем изменения показания температуры или электропроводности. При стандартной программной обработке исходных CTD-данных применяется или процедура сглаживания профиля электропроводности [1, 5, 11], или метод обострения градиента измеренной температуры [1, 7].
Электронный журнал ИССЛЕДОВАНО В РОССИИ
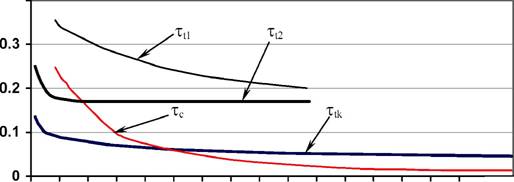
Tmd(t)
1-ехр(-?)
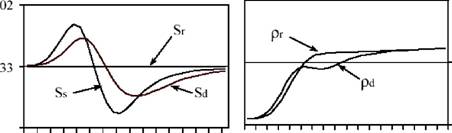
где it>Td>Tc и id подбирается аналогично xs по критерию minA2. В данном случае ложная структура солености уменьшается путем приближения T'md к Cm (или Т'т к Т'с на рис. 26), а толщина слоя скачка температуры становится близкой к реальной (рис. 26). Однако, с помощью представленных способов, как правило, не удается полностью устранить ПСС. Для рассмотренного выше модельного примера CTD-зондирования на рассчитанных профилях солености Sd(Cm,Tmd) и Ss(Cms,Tm) (рис. За) ложные выбросы уменьшаются в несколько раз и оказываются минимальными при Td~Ts~0,134c. В результате такой обработки устраняется ложная инверсия плотности (рис. 2г). Вместо нее появляется ложная ступенька плотности на нижней границе слоя скачка температуры (рис.36).
S |
 Р
Р
(г/см3)
1.02619
32.98 |
1.02614
0 0аа 0 5аа 1 0а 0.0 0.5аа 1.0 z; (м)
а)аа б)
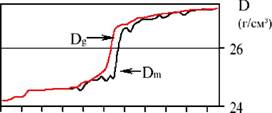
Рис. 3. Профили солености (а) и плотности (б), заданные в качестве истинных (Sr(z) и pr(z)) при моделировании измерительного процесса датчиками CTD-зонда Mark ШС; а также профили Sd(Cm,Tmd), Ss(Cms,Tm) и pd(Sd,Tmd), полученные после применения методов согласования измеренных (модельных) профилей Tm(z) и Cm(z)
Оптимальным способом согласования профилей Cm(t) и Tm(t), по-видимому, является их одновременное обострение с использованием формулы (13). При этом ложная структура на профиле солености исчезает, когда параметры обострения тождественно равны соответствующим параметрам инерционности: Tdc-Tc и Tdt-Tt.
При CTD измерениях в реальных условиях качки и дрейфа судна зонд опускается неравномерно, динамика обтекания зонда нестационарна. Соответственно, динамические инерционные характеристики датчиков и их отношение изменяются в процессе зондирования. Кроме того, в показаниях датчиков присутствует случайный шум, приводящий к дополнительным искажениям измеряемых величин. При использовании метода обострения градиента температуры такие случайные искажения, как правило, увеличиваются по сравнению с исходными возмущениями.
Поэтому в некоторых зондах применяется метод комбинирования сигналов различных датчиков. В зондах Mark-IIIB этот метод реализован в электронной схеме блока измерения температуры [8], а в зондах Mark-IIIC -аа при обработке исходных CTD-данных [9]. В обоих
Электронный журнал ИССЛЕДОВАНО В РОССИИ
187.3 190.1 192.6 195.2
уа i-------- 1------- 1------- 1------- 1------- 1------- 1---
 (м/сек)
(м/сек)
1.4 |
|
0.6 |
|
т |
|
ее; |
2.8 |
2.3 |
|
1.8 |
|
4 |
|
2 |
|
0 |
|
S |
34.01 |
(%о) |
|
33.99 |
|
33.97 |
|
33.95 |
|
34.02 |
|
34.00 |
|
33.98 |
|
D |
27.18 |
27.13 |
С 0.715 |
-- 0.705а б/ |
0.695 |
10а t, (сек) |
|
в/ |
г/ |
10 t, (сек) |
Д/ |
е/ |
27.08 |
а/
.Cm |
|||
?*^=------------------------------------- |
|||
Tm --------- 1------- 1------- 1------- 1------- 1--------- 1 |
|||
1----- 1----- 1----- 1аа ^1аа 1 |
0а 2а 4а 6а 8а 10а t,аа (сек)
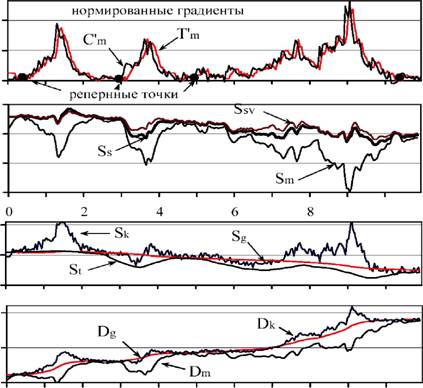
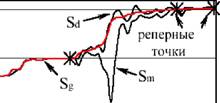
Рис. 4. Профили скорости опускания прибора (а), удельной электропроводности Cm(t) и температуры Tm(t) - платиновый термометр (б), на интервале глубин 187-201 м. А также профили градиента электропроводности и температуры (в), солености Sm, Ss, Ssv, St, SK и Sg (г, д) и условной плотности Dm, Dk и Dg (е). Станция 47. Японское море. Зонда Mark-QIC. 30-й рейс НИС Проф. Гагаринский, ноябрь 2000 г
Электронный журнал ИССЛЕДОВАНО В РОССИИ
вда
гДТ
В тех случаях, когда реперные точкиаа располагаются в квазиоднородных слоях (ATmлATr), и
в HS
относительный градиент солености в прослойке мал:------ л 1, тогда ncлl/y, a ATm(t)sATm(C).
г ДТ
В результате применения метода ГИ полностью устраняются инверсии плотности и локальные экстремумы солености на масштабах 1-Зм в слое скачка температуры (см. профили Sg(Cm,Tg) HDg(Tg,Sg) рис.4ди4е).
Этот метод оказывается наиболее эффективным при обработке CTD-профилей, измеренных зондами со слабым разрешением и низкой точностью, например, зондом STD -1000 (лUnion Engineering Ltd., Япония), имеющим Az=1m и 8Тл0,05С соответственно [10]. На рис. 5 приведены исходные профили температуры Tm(z) и удельной электропроводности Cm(z), измеренные в заливе Петра Великого (Японское море) 20 октября 1990 г на станции № 51 (НИС Базальт). Отмечается характерное для рассогласованных датчиков, обладающих разной инерционностью, смещение профилей температуры и электропроводности в слое скачка.
нормированные градиенты |
 т,с
т,с
0 |
20 |
40 |
0 |
20 |
40аа z, (м)
а/аа Ща иаа "иаа б/
Рис. 5. Профили: (а) - температуры Tm(z) и удельной электропроводности Cm(z); (б) -градиентов температуры Tm'(z) и электропроводности Cm'(z), нормированных на значение среднего градиента в слое от поверхности до дна. Зонд STD-1000. Станции № 51
|
|
S 34
(%о)
33
32
т---- 1--- 1--- 1--- 1Чi----- 1--- 1--- 1--- г
40
0 |
20 |
0аа 20а 40аа z,(m)
а) б)
Рис. 6. Профилиаа соленостиаа (а)аа иаа условнойаа плотностиаа (б): Sm(z),аа Dm(z),
рассчитанные по исходным значениям температуры и электропроводности (Тт, Ст), а также
Sd(z),аа Sg(z)аа иаа Dg(z),аа рассчитанныеаа послеаа обработкиаа профиляаа температурыаа методами
обострения (13) и градиентной интерполяции (16). Станции № 51
Электронный журнал ИССЛЕДОВАНО В РОССИИ
727а
На рис. 6 показаны профили солености (а) и плотности (б), рассчитанные по измеренным значениям Tm(z) и Cm(z), и полученные в результате применения метода градиентной интерполяции (16). Видно, что после обработки измеренного профиля температуры отмеченным методом полностью устраняется ложный выброс солености, и слой скачка плотности смещается вверх на три метра, занимая положение, соответствующее показаниям эхолота. На этом же рис. 6а представлен профиль Sd(z) полученный после обработки профиля температуры Tm(z) методом обострения (13) при V*id~0,54 м.
Заключение
При подробном изучении механизма возникновения ложной структуры солености за счет динамической рассогласованности инерционных характеристик датчиков CTD-зонда показано, что ошибка в определении солености в основном зависит от точности измерения температурного профиля, на которую влияют: инерционность датчика, скорость опускания зонда и градиент температуры. Решение задачи согласования CTD-данных требует индивидуального анализа как измеренных профилей температуры и электропроводности, так и условий измерения в каждом конкретном случае и для каждого типа CTD-зонда.
Предлагаемые различными авторами методы подавления ложной структуры солености основаны на устранении рассогласованности измеренных параметров. Рассмотрены наиболее распространенные методы согласования профилей температуры и электропроводности. Показаны отличия результатов применения этих методов на примере обработки CTD-данных, полученных с помощью зонда Mark ШС. Эффективная обработка CTD-данных зонда Mark обеспечивается его уникальными точностными характеристиками, в том числе, высоким разрешением по времени - 8t=0,03-0,04c, что позволяет получать оценку динамических характеристик датчиков на разных интервалах зондирования. В результате применения методов сглаживания профиля электропроводности или обострения градиента температуры удается уменьшить амплитуду ложных выбросов в 10-20 раз. Подбор величин соответствующих параметров сглаживания или обострения осуществляется путем минимизации рассогласованности нормированных градиентов температуры и электропроводности. Наиболее эффективным методом устранения ложной структуры солености при использовании зонда Mark III является комбинированный ТСС-метод, предложенный Takanori Iwao (2001). В случае, когда условия измерения не позволяют выдержать рекомендуемую постоянную скорость опускания зонда (например, при сильной качке), а также при использовании зондов с грубым разрешением рекомендуется использовать предложенный в работе метод градиентной интерполяции.
Работа выполнена при финансовой поддержке гранта РФФИ 04-05-64233.
итература Электронный журнал ИССЛЕДОВАНО В РОССИИ 728а
Все научные статьи