
 Авторефераты по темам >>
Разные специальности - [часть 1] [часть 2]
Авторефераты по темам >>
Разные специальности - [часть 1] [часть 2]
Технология создания и доводки алгоритмов адаптивного управления демпфированием в подвеске колёсных машин в особых условиях движения
Автореферат кандидатской диссертации
Мирошниченко Дмитрий Александрович
ТЕХНОЛОГИЯ СОЗДАНИЯ и доводки АЛГОРИТМОВ АДАПТИВНОГО
УПРАВЛЕНИЯ ДЕМПФИРОВАНИЕМ В ПОДВЕСКЕ КОЛЁСНЫХ МАШИН В ОСОБЫХ УСЛОВИЯХ ДВИЖЕНИЯ
05.05.03 - Колёсные и гусеничные машины
Автореферат
диссертации на соискание ученой степени
кандидата технических наук
Волгоград - 2012
Работа выполнена на кафедре "Высшая математика'в Волгоградском государственном техническом университете.
Научный руководитель
Официальные оппоненты:
Ведущее предприятие
доктор технических наук, профессор Горобцов Александр Сергеевич
Тольский Владимир Евгеньевич, доктор технических наук, профессор, Московский автомобильно-дорожный государсвенныйаа техническийаа университет (МАДИ),
профессор кафедры "Техносферная безопасность";
Чернышов Константин Владимирович, кандидат технических наук, доцент, Волгоградский государственный технический университет, доцент кафедры "Техническая эксплуатация и ремонт автомобилей".
Московский государственный индустриальный университет (ФГБОУ ВПО МГИУ), г. Москва.
Защита состоится 28 сентября 2012 г. в 10.00 часов на заседании диссертационного совета Д 212.028.03 при Волгоградском государственном техническом университете, расположенном по адресу: 400005, г. Волгоград, пр.Ленина, д. 28.
С диссертацией можно ознакомиться в библиотеке Волгоградского госуд-раственного технического университета.
Автореферат разослан
2012 г.
Ученый секретарь диссертационного совета
Qf~]
Ожогин Виктор Александрович.
Общая характеристика работы
Актуальность работы
Повышение плавности хода и защита от вибраций является актуальной проблемой транспортного машиностроения. Рост скоростей, увеличение максимальной грузоподъёмности и мобильности транспортных средств, увеличение времени работы водителей, зачастую неудовлетворительное состояние дорог обуславливают необходимость совершенствования виброзащитных систем и внедрение новых технических решений.
Одним из путей решения проблемы снижения затрат и уменьшения времени для разработки новых ТС и систем управления является использование имитационного компьютерного моделирования. При этом использование специального программного обеспечения для построения математических моделей с управляющими контурами позволяет сократить время разработки как на этапе создания математических моделей так и на этапе внедрения алгоритмов управления в микропроцессорный блок управляющей системы автомобиля.
Проведённый анализ алгоритмов управления параметрами подвески показал, что они имеют сложную структуру и для их реализации необходимы сложные системы управления. Создание и отладка таких управляющих систем является сложной и ресурсоёмкой задачей. Математическое моделирование всей системы с управляющими контурами и управляющими блоками позволяет существенно сократить экономические издержки как на этапе проектирования, так и на этапе испытаний и отладки. Также оно позволяет вести дальнейшие исследования без создания опытных образцов.
Цель диссертационной работы состоит в разработке метода создания и доводки алгоритмов адаптивного управления демпфированием в подвеске колёсных машин в различных условиях движения на основе комплексной математической модели ТС, допускающей перенос программы управления на бортовой микропроцессор автомобиля с минимальными изменениями для повышения эффективности работы подвески колёсной машины и ускорения её цикла разработки.
Для достижения поставленной цели в работе были поставлены и решены следующие задачи:
- проведён анализ современных систем управления подвеской автомобиля и методов их проектирования;
- разработана пространственная математическая модель автомобиля с учётом управляющих контуров, включающая в себя программу управления демпфированием подвески, позволяющая выполнить анализ и доводку алгоритма управления системы гашения колебаний;
- определены рациональные параметры демпфирования и упругих свойств
3
подвески при движении ТС в различных условиях движения;
- сформулированы критерии алгоритма переключения демпфирования в амортизаторах подвески колёсных машин в зависимости от типа микропрофиля и режима движения (прямолинейное движение, разгон, торможение, поворот);
- проведена идентификация созданной модели АТС по результатам экспериментальных данных;
Научная новизна:
- обоснован метод отладки и доводки управляющих программ подвеской колёсной машины на математической модели, позволяющий с минимальными изменениями переносить программу в микропроцессорный блок управления реального объекта;
- разработана и отлажена оригинальная пространственная многомассовая модель АТС колёсной машины, с учётом кинематики работы подвески и различных упругих соединений, которая позволяет получить адекватные результаты нагружения и ускорений различных элементов конструкции АТС;
- впервые предложен многокритериальный алгоритм адаптивного управления демпфированием подвески автомобиля и доказана его эффективность при выборе рациональных параметров управления.
Практическая значимость. Разработанный метод отладки алгоритма управления демпфирующими свойствами элементов подвески колёсной машины позволяет сократить сроки проектирования и доводочных испытаний. Разработанная математическая модель является универсальной и позволяет исследовать свойства ГПР различных конструкций. Математическая модель отличается учётом управляющих контуров и управляющих модулей, которые позволяют запрограммировать алгоритм управления демпфирующими свойствами ГПР с учётом переноса в микропроцессорный блок управления. Научные положения диссертации обоснованы и подтверждены идентификацией математической модели с экпирементальными данными.
Результаты, изложенные в диссертации, могут быть использованы для:
- усовершенствования работы алгоритма управления подвеской автомобиля с использованием разработанной математической модели;
- разработки и внедрения новых алгоритмов управления подвеской АТС на основе разработанной математической модели;
Реализация результатов работы. Результаты работы внедрены в ОАО "ВМК "ВгТЗ".
Апробация работы Основные результаты диссертации докладывались и обсуждались на:
1. XIV региональной конференции молодых исследователей Волгоградской области (Волгоград, ноябрь 2009 г.);
4
- научном семинаре "Компьтерное моделирование в железнодорожном транспорте: вопросы динамики, прочности и износа"(Брянск, февраль 2009 г.);
- первой объединённой международной конференция IMSD 2010 (Лап-пеенранта, Финляндия, 25-27 мая, 2010 г.);
- 48-ой научной конференции (ВолгГТУ, Волгоград, 31 января - 4 февраля 2011 г.);
- 49-ой научной конференции (ВолгГТУ, Волгоград, 30 января - 3 февраля 2012 г.).
Публикации. Материалы диссертации опубликованы в 7 печатных работах, из них 3 статьи во входящих в "Перечень российских рецензируемых научных журналов рекомендованных ВАК, 2 статьи в сборниках трудов конференций и тезисы 2 докладов.
Структура и объем диссертации Диссертация состоит из введения, 4 глав, заключения и библиографии. Общий объем диссертации 114 страниц, из них 80 страниц текста, включая 30 рисунков. Библиография включает 73 наименования на 9 страницах.
Содержание работы
Во Введении обоснована актуальность диссертационной работы, сформулирована цель и аргументирована научная новизна исследований, показана практическая значимость полученных результатов, представлены выносимые на защиту научные положения.
В первой главе диссертации рассмотрен исторический контекст совершенствования систем подрессоривания автомобилей.
Для достижения поставленной цели работы в диссертации были проанализированы и изучены труды, которые можно разделить на две группы:
- работы, посвященные теории колебаний: И.М. Бабаков, В.Л. Бидер-ман, Б.Г. Коренев, Л.М. Резников, Я.Г. Пановко, В.А. Розанов, В.О. Кононенко, СМ. Harris, A.G. Piersol.
- работы, посвященные динамике, расчётам систем подрессоривания и моделированию этих систем: Е.А. Чудаков, А.А. Хачатуров, Р.В. Ротенберг, А.А. Силаев, А.Д. Дербаремдикер, Я.М. Певзнер, С.К. Карцов, Ю.А. Поляков, А.Е. Плетнев, А.С. Горобцов, Д.Ю. Погоре-лов, В.И. Колмаков и ряд его учеников, СМ. Воеводенко, В.Е. Толь-ский, Г.О. Котиев, Е.Б. Сарач, Huvarinen Jukka-Pekka, D. Crolla, В.Т. Fijalkowski, J.C Dixon, H. Bernd, E. Metin, W.F. Milliken и другие.
Исследован опыт отечетсвенных и зарубежных ученых по применению активных и адаптивных систем подрессоривания. Проведён анализ существующих систем, создана их классификация. Классификация основана на
5
взаимодействии систем управления: воздействие на упругую составляющую, на демпфирующую составляющую или на обе одновременно. Так же классификация учитывает затраты энергии на управление и быстродействие привода управления.
Проведён анализ современных алгоритмов управления системами гашения колебаний в подвеске ТС. На основе анализа определены цели и задачи работы. Центральным звеном систем управления являются алгоритмы управления, для отладки которых используются сложные математические модели. В диссертации исследованы существующие модели для исследования систем гашения колебаний.
Существующие методы управления параметрами подвески можно разделить на два класса: непрерывное управление параметрами (активная подвеска) и ступенчатое управление (адаптивная подвеска). В работе рассматриваются алгоритмы адаптивного управления как технически более просто реализуемые. На этой основе в заключительной части главы сформулированы основные задачи, решение которых необходимо для достижения цели работы. Решение этих задач описывается в следующих главах.
Во второй главе рассматривается существующее программное обеспечение для создания математических моделей. Показаны достоинства и недостатки каждого из классов ПО. Представлена разработанная математическая модель АТС.
На основе анализа расчётных схем математических моделей, проведённого в первой главе, была выбрана и построена многомассовая расчётная схема автомобиля, учитывающая кинематику подвески и различные упруго-депфирующие кинематические связи. Исследования динамики автомобиля проводились в системе моделирования динамики систем тел ФРУНД. На рисунке 1 показан общий вид расчётной схемы автомобиля.
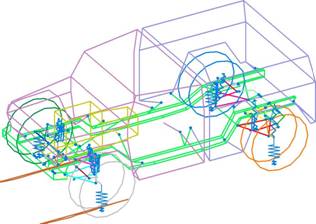
Рис. 1. Общий вид расчётной схемы автомобиля
Формирование уравнений движения систем тел основано на уравне-
6
ниях Лагранжа первого рода. Уравнения динамики механической системы состоят из уравнений свободного движения тел и уравнений связей от кинематических пар. Кроме кинематических пар связи между телами могут задаваться силами от упруго-демпфирующих элементов, соединяющих тела.
Для упрощения численного интегрирования таких систем уравнений уравнения связей записываются во вторых производных (связи по ускорениям), что позволяет использовать явные методы интегрирования без необходимости решать нелинейную систему уравнений относительно переменных состояния. Уравнения движения произвольной системы тел при таком подходе записываются в виде:
Мх Ч DT= f(x,x,t)+ U(x,x,t),.ч
Dx= h(x,x)
Где x- вектор обобщённых координат всей системы размерностью п. М - матрица инерции, f(x,x,t) - вектор внешних сил, включающий в себя силы нагрузок, силы от упруго - демпфирующих элементов и гироскопические силы, D- матрица переменных коэффициентов уравнений связей от кинематических связей размерностью к х п (к - число связей), h(x,x) - вектор правых частей уравнений связей, р - вектор множителей Лагранжа, U(x, ж, t) - функция описывающая силы в управляемых демпферах. Уравнение (1) является одной из форм записи уравнений Лагранжа 1 рода.
Численное решение уравнений движения системы уравнений (1) проводилось при помощи явного метода Рунге-Кутты четвёртого порядка точности.
Для математической модели, расчётная схема которой представлена на рисунке 1 приняты следующие допущения: все тела автомобиля абсолютно жёсткие и в модели не учитывается работа трансмиссии.
Данные для микропрофилей были получены экспериментально на автополигоне НИЦИАМТ ФГУП "НАМИ".
Расчётная схема АТС содержит раму, кабину, фургон, силовой агрегат, направляющий аппарат подвески и соединительные элементы. Отдельно показаны и описаны подмодели подвески передних управляемых колёс, подвески задних неуправляемых колёс, модель рулевого управления, подмодели подвески силового агрегата, кабины и фургона.
В третьей главе проводится определение конструктивных параметров подвески АТС, определяющих её демпфирующие свойства, и проводится разработка адаптивного алгоритма демпфирования в подвеске.
Варьирование характеристик амортизатора в расчетах происходит за счет изменения параметров такого амортизатора. В качестве базовых настроек используются номинальные параметры амортизатора.
7
Для обозначения вариантов параметров амортизатора используются следующие сокращения: А1- номинальный амортизатор; AN - номинальный амортизатор с увеличенными в N раз коэффициентами сопротивления на всех участках, например, А4 - амортизатор с увеличенным в 4 раза сопротивлением на всех участках. Для номинального амортизатора коэффициент на дроссельном режиме отбоя в 2 раза больше, чем на дроссельном режиме сжатия. Скорость срабатывания клапанов сжатия и отбоя 0,1 м/с. Полная масса автомобиля равна 7500 кг.
Для выбора рациональных значений демпфирования амортизаторов были исследованы варианты движения автомобиля на скорости 55 км/ч. На ровном булыжнике выявлено, что приемлемый уровень сопротивления амортизатора соответствует параметрам А4.
На грунтовой дороге наиболее интенсивные колебания происходят на частоте подвески в районе 1 Гц. На этой частоте не выполняются нормы по ГОСТ 12.1.012. Амортизатор А8 даёт приемлемые величины вертикальных виброускорений на сиденье водителя.
Для динамометрической дороги оптимальные настройки амотризатора - штатные настройки, то есть амортизатор А1.
Отсюда можно сделать общий вывод, что для дороги хорошего качества оптимальным будет минимальное демпфирование, а для дороги плохого качества необходимо максимальное демпфирование в амортизаторе.
Наряду с анализом плавности хода автомобиля с полной нагрузкой был проведён анализ плавности хода автомобиля снаряжённой массы. При движении автомобиля по динамометрической дороге наблюдается снижение вертикальных ускорений на частоте 10 Гц. При движении автомобиля по грунтовой дороге происходит увеличение ускорений в районе 4 Гц. Отсюда было установлено, что выбор параметров амортизатора следует проводить для половинной массы нагрузки.
На основе определённых параметров проводится разработка алгоритма управления демпфирования в подвеске АТС при движении автомобиля по различным типам профиля. Технически просто реализовать четыре ступени работы амортизатора за счёт регулирования на ходе сжатия и отбоя. В связи с этим рассматривается четыре варианта характеристик демпфирования.
Исходя из условий движения и проведённых выше исследований определены оптимальные параметры ступенчатого регулируемого амортизатора ГПР: режим С1 -- коэффициенты сопротивления на дроссельном режиме отбоя 40 кН/(м/с), сжатия 25 кН/(м/с); режим С2 Ч коэффициенты сопротивления на дроссельном режиме отбоя 15 кН/(м/с), сжатия 25 кН/(м/с); режим СЗ -- коэффициенты сопротивления на дроссельном режиме отбоя 40 кН/(м/с), сжатия 7 кН/(м/с); режим С4 Ч коэффициенты сопротив-
8
ения на дроссельном режиме отбоя 15 кН/(м/с), сжатия 7 кН/(м/с). Регулирование достигается за счёт введения ступенчатых клапанов в линии сжатия и линии отбоя.
Скорость срабатывания клапанов сжатия и отбоя Ч 0,1 м/с. Проведены расчёты для других скоростей, но изменения в характеристиках демпфирования были незначительны.
Для формирования критериев переключения амортизатора с одного режима на другой в стационарных режимах проведены многовариантные расчеты движения автомобиля для нескольких наборов скоростей по трем типам дорог: динамометрическая дорога, грунтовая дорога и ровный булыжник, при всех четырех режимах работы амортизатора.
По результатам такого анализа получены закономерности изменения различных показателей вибрации автомобиля в зависимости от типа дорог и скорости. Основная дорога использования автомобиля -- грунтовая дорога.
Было выявлено три основных критерия для работы алгоритма: ускорения в характерных точках АТС, силы, возникающие в амортизаторе ГПР, и относительные перемещения штока ГПР.
Графики ускорений в характерных точках АТС для различных режимов демпфирования показаны ниже.
Максимальное усилие в ГПР ограничено конструктивными факторами величиной 105 кН. При проведении расчётной оценки динамических усилий в ГПР максимальные усилия возникают при движении автомобиля по разбитому булыжнику и не превышают 65 кН. Среднеквадратичные значения (СКЗ) сил в ГПР могут быть использованы в качестве критерия, определяющего моменты переключения режимов амортизатора.
Из рисунков 2 и 3 следует, что на низких частотах (0,8 - 1 Гц) графики СКЗ вертикальных ускорений существенно отличаются, в то время, как графики СКЗ сил в ГПР практически совпадают. На профилях, где преобладают низкочастотные возмущения, критерием переключения режима работы амортизатора служат данные СКЗ вертикальных ускорений в третьоктавах. На частоте 10 Гц на тех же рисунках наблюдается обратная ситуация. Графики вертикальных ускорений практически совпадают, в то время, как графики сил в ГПР существенно различаются. Таким образом на профилях, где преобладает высокочастотные возмущения, критерием переключения режима работы амортизатора служат данные СКЗ сил в ГПР.
Алгоритм управления демпфированием автомобиля можно представить в виде конечного автомата, который насчитывает 7 состояний: состояние 1 - режим С1, стационарное движение; состояние 2 - режим СЗ, стационарное движение; состояние 3 - режим С2, стационарное движение; состояние 4 - режим С4, стационарное движение; состояние 5 - режим С1, разгон или торможение; состояние 6 - режим С1, поворот; состояние 7 - режим С1, единичное возмущение.
Входными параметрами для каждого состояния являются: текущая скорость автомобиля, индикация нажатия педали акселератора, индикация нажатия педали тормоза, текущий угол поворота руля автомобиля, температура в каждой ГПР, дискретный набор СКЗ значений вертикальных ускорений на сиденье водителя в третьоктавных полосах частот, дискретный набор СКЗ значений вертикальных ускорений на раме сзади автомобиля в третьоктавных полосах частот, дискретный набор СКЗ давлений во всех ГПР в третьоктавных полосах частот, дискретные гистограммы распределения относительных ходов штока каждой ГПР.
11
Критерии перехода из одного состояния в другое и обратно подробно описаны в тексте диссертации.
В четвёртой главе проводится идентификация математической модели. Приводятся результаты экспериментальных исследований. Даётся описание аппаратно-измерительного комплекса, условий и методики проведения экспериментов. Испытания проводились на территории испытательного полигона на трёх основных типах дорог: асфальтобетонная дорога хорошего качества (динамометрическая дорога), ровный булыжник (булыжник удовлетворительного качества) и разбитый булыжник (булыжник с выбоинами и буграми).
Система управления демпфированием, смонтированная на автомобиле, позволяет записывать данные датчиков для анализа. На автомобиле находятся следующие датчики: датчик ускорений под сиденьем водителя, датчик ускорений на раме сзади над задним мостом, датчик скорости автомобиля, датчики перемещений штока всех четырёх ГПР, датчик положения педали акселератора, датчик положения педали тормоза, датчик поворота руля.
Получение экспериментальных данных проводилось в два этапа: запись данных при проведении экспериментов и их обработка.
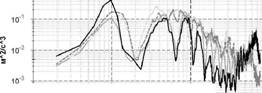
Для получения количественных показателей плавности хода автомобиля были построены спектры вертикальных ускорений кабины под сиденьем водителя автомобиля и на раме сзади автомобиля для трёх типов профилей. Проведена процедура идентификация и уточнения математической модели АТС.
Автомобиль двигался по ровному булыжнику со скоростью 50 км/ч с двумя различными режимами демпфирования: С1 и С4. На рисунках 7 и 8 показаны спектры вертикальных ускорений под сиденьем водителя и на раме сзади. Из графиков видно, что расчётные и экспериментальные кривые близко совпадают как качественно, так и количественно в требуемом диапазоне частот 0,7 - 22,4 Гц. Значительные расхождения наблюдаются лишь на частотах выше 22,4 Гц. Более низкие ординаты ускорений на расчётных графиках можно объяснить отсутствием учёта работы трансмиссии в модели автомобиля.
В таблице 1 показаны значения СКЗ вертикальных ускорений под сиденьем водителя и на раме автомобиля сзади для расчёта и эксперимента в диапазоне частот 0,7 - 22,4 Гц. Видно, что погрешность расчётных данных не более 31%. Полученная погрешность, для стохастических процессов, говорит об адекватности построенной математической модели.
Для получения качественных показателей плавности хода автомобиля были построены спектры вертикальных ускорений кабины под сиденьем водителя и на раме сзади автомобиля для разбитого булыжника. Из расчё-
12
![]()
![]() Вертикальные ускорения под сиденьем, ровный булыжник
Вертикальные ускорения под сиденьем, ровный булыжник
Вертикальные ускорения, рама сзади, ровный булыжник
расчёт, режим демпфирования С4 расчёт, режим демпфирования С1 эксперимент, режим демпфирования С4 эксперимент, режим демпфирования С1
- расчёт, режим демпфирования С4
- расчёт, режим демпфирования С1
Чаа эксперимент, режим демпфирования С4
ж- эксперимент, режим демпфирования С1
10-|аа ,----------- у-Ч,---- w^, |

 СКО графика 1 = 1,03879' ; СКО графика 2 = 1,2272 СКО графика 3 = 1,35585 . СКО графика 4 = 1,46821 |
СКО графика 1 = 1,03879' ; СКО графика 2 = 1,2272 СКО графика 3 = 1,35585 . СКО графика 4 = 1,46821 |
_СКО графика 1 = 1,43672 _
СКО графика 2 = 1,5657 : СКО графика 3 = 2,55006 _iCKO графика 4 = 3,06912 _
10'
10'
Р[Гц]
Р[Гц]
Рис. 7. Спектры вертикальных ускорений под сиденьем водителя для различных режимов демпфирования, ровный булыжник, 50 км/ч
Рис. 8. Спектры вертикальных ускорений на раме сзади для различных режимов демпфирования, ровный булыжник, 50 км/ч
Таблица 1. Таблица СКЗ вертикальных ускорений на ровном булыжнике в диапазоне 0,7 - 22,4 Гц
Точка замера |
Под сиденьем водителя |
На раме сзади |
||
Режим |
С1 |
С4 |
С1 |
С4 |
Расчёт |
0.985 |
0.838 |
1.393 |
1.263 |
Эксперимент |
1.337 |
1.219 |
1.568 |
1.385 |
Погрешность |
27% |
31% |
11% |
9% |
тов видно, что графики ускорений под сиденьем водителя качественно и на раме сзади похожи на экспериментальные графики в требуемом диапазоне частот 0,7 - 22,4 Гц. Существенные расхождения наблюдаются на частотах выше верхней границы требуемой величины.
В таблице 2 показаны значения СКЗ вертикальных ускорений под сиденьем водителя и на раме сзади автомобиля для расчёта и эксперимента в диапазоне частот 0,7 - 22,4 Гц. Видно, что погрешность расчётных данных 42-43% для режима C4. Столь значительные расхождения можно объяснить существенными различиями в параметрах используемых профилей. Спектральный состав профиля был косвенно оценен по спектрам относительных перемещений штока ГПР.
Для получения качественных показателей плавности хода автомобиля были построены спектры вертикальных ускорений кабины под сиденьем водителя и на раме сзади автомобиля для динамометрической дороги. Из анализа данных установлено, что расчётные и экспериментальные графики качественно совпадают на частотах ниже 18 Гц, дальше идёт существенное расхождение. В расчёте ординаты ускорений существенно ниже, чем в эксперименте. Это можно объяснить отсутствием в математической модели
13
Таблица 2. Таблица СКЗ вертикальных ускорений на разбитом булыжнике в диапазоне 0,7 - 22,4 Гц
Точка замера |
Под сиденьем водителя |
На раме сзади |
||
Режим |
С1 |
С4 |
С1 |
С4 |
Расчёт |
3.37 |
3.27 |
4.774 |
4.469 |
Эксперимент |
2.387 |
1.848 |
3.439 |
2.589 |
Погрешность |
29% |
43% |
28% |
42% |
Таблица 3. Таблица СКЗ вертикальных ускорений на динамометрической дороге в диапазоне 0,7 - 22,4 Гц
Точка замера |
Под сиденьем водителя |
На раме сзади |
||
Режим |
С1 |
С4 |
С1 |
С4 |
Расчёт |
0.572 |
0.492 |
1.044 |
0.807 |
Эксперимент |
0.702 |
0.552 |
1.027 |
0.964 |
Погрешность |
19% |
11% |
2% |
16% |
автомобиля учёта работы трансмиссии.
В таблице 3 показаны значения СКЗ вертикальных ускорений под сиденьем водителя и на раме сзади автомобиля для расчёта и эксперимента в диапазоне частот 0,7 - 22,4 Гц. Видно, что погрешность расчётных данных не превышает 19%. Полученная погрешность, для стохастических процессов, указывает на адекватность созданной математической модели.
Общий сравнительный анализ результатов моделирования показывает, что математическая модель имеет хорошую сходимость с реальными экспериментами. Низкий процент совпадения СКЗ вертикльных ускорений на разбитом булыжнике обусловлен отсутствием учёта работы трансмиссии в математической модели АТС, допущением, что все тела в составе модели абсолютно жёсткие, и различиями в характеристиках профиля для эксперимента и для расчёта. Добавив модель трансмиссии в общую модель автомобиля, можно уменьшить погрешность результатов до приемлемого уровня в 10-20%.
Основные результаты и выводы работы
- Разработана и отлажена технология создания алгоритма адаптивного управления подвеской колёсной машины в различных условиях движения, которая позволяет переносить реализованный алгоритм с математической модели на реальный автомобиль с минимальными модификациями;
- Разработана пространственная математическая модель АТС повышенной проходимости, учитывающая контуры управления. В модели реализован адаптивный алгоритм управления демпфирования элементов
14
подвески;
- Установлено, что погрешность значений СКЗ вертикальных ускорений в модели по сравнению с экспериментом не превышает 31%. Для стохастических процессов полученная погрешность говорит об адекватности разработанной математической модели;
- Установлены рациональные показатели демпфирования в подвеске АТС повышенной проходимости для стационарных и нестационарных условий движения;
- Разработан многокритериальный алгоритм работы адаптивного демпфирования в подвеске АТС повышенной проходимости. Преимущество созданного алгоритма в том, что он комплексно учитывает различные параметры влияющие на плавность хода и управляемость: скорость автомобиля, ускорения на сиденье водителя, ускорения на раме сзади, относительные перемещения штоков ГПР, положение педалей тормоза и акселератора, угол поворота рулевого колеса;
Основные положения диссертации опубликованы в следующих работах:
В изданиях, входящих в Перечень российских рецензируемых научных журналов рекомендованных ВАК:
- Горобцов, А.С. Анализ динамических систем с избыточными связями различной степени статической неопределимости / А.С. Горобцов, Д.А. Мирошниченко, СВ. Солоденков // Известия высших учебных заведений. Поволжский регион. Технические науки. - 2009. - № 3. -С. 133-141.
- Горобцов, А.С. Пространственные колебания подрессоренной массы автомобиля при случайном возмущении / А.С. Горобцов, Д.А. Мирошниченко // Автомобильная промышленность. - 2010. - № 7. - С. 20-21.
- Мирошниченко, Д.А. Разработка и отладка алгоритма системы управления многомерным техническим объектом / Д.А. Мирошниченко, А.С. Горобцов // Изв. ВолгГТУ. Серия "Актуальные проблемы управления, вычислительной техники и информатики в технических системах". Вып. 10 : межвуз. сб. науч. ст. / ВолгГТУ. - Волгоград, 2011. -№ 3. - С. 13-15.
В прочих изданиях:
4.а Горобцов, А.С. Визуализация собственных форм колебаний по ре
зультатам статистического моделирования динамики транспортных
средств / А.С. Горобцов, Д.А. Мирошниченко, М.В. Резников //
Компьютерное моделирование в железнодорожном транспорте: вопро
сы динамики, прочности и износа: сб. тез. науч.-техн. семинара, г.
Брянск, 9-12 февр. 2009 г. / БГТУ, Лаборатория "Вычислительная
15
механика". - Брянск, 2009. - С. 19-20.
- Громов, Е.Г. Investigation and optimization of active suspension in multibody car model / Е.Г. Громов, Д.А. Мирошниченко, А.С. Го-робцов // Multibody System Dynamics : the First Joint International Conference (Lappeenranta, Finland, May 25-27, 2010 : book of adstracts / Lappeenranta University of Technology.- [Lappeenranta], 2010.- P. 130.- Англ.
- Мирошниченко, Д.А. Анализ адаптивного демпфирования подвески автомобиля / Д.А. Мирошниченко, А.С. Горобцов // XIV региональная конференция молодых исследователей Волгоградской области (Волгоград, 10-13 нояб. 2009 г.) : тез. докл. / ВолгГТУ [и др.]. -Волгоград, 2010. - С. 66-68.
- Мирошниченко, Д.А. Трёхмерная визуализация результатов моделирования многотельной динамики механических систем / Д.А. Мирошниченко, А.С. Горобцов // XIV региональная конференция молодых исследователей Волгоградской области (Волгоград, 10-13 нояб. 2009 г.) : тез. докл. / ВолгГТУ [и др.]. - Волгоград, 2010. - С. 198-199.
ичный вклад автора В работах [1-7] автор принимал непосредственное участие в постановке задач, выполнении работ, проведении расчетов, в подготовке и проведении экспериментальных исследований, в обсуждении полученных результатов.
Подписано в печатьаа .а .2012. Заказ № . Тираж 100 экз. Печ. л. 1,0.
Формат 60 х 84 1/16. Бумага офсетная. Печать офсетная.
Типография ИУНЛ
Волгоградского государственного технического университета
400005, Волгоград, ул. Советская, 35
Авторефераты по темам >>
Разные специальности - [часть 1] [часть 2]