
Лгоритма его функционирования), устранения некорректности первичного описания и последовательного представления (при необходимости) описаний на различных языках
| Вид материала | Документы |
| Сложными зубчатыми механизмами Аналитическое исследование кинематики рядного механизма. Графическое исследование кинематики рядного механизма. |
- Х описаний документов и пополнению сводного электронного каталога с целью устранения, 58kb.
- Обеспечение производства ЭВМ базовые понятия (сапр/астпп/саит), 710.17kb.
- Система Автоматизации Инженерного Труда cad computer Automation Design cam computer, 35.46kb.
- Проектирования это создание описания, необходимого для построения в заданных условиях, 258.57kb.
- История описания системных васкулитов, 320.25kb.
- История описания системных васкулитов, 320.23kb.
- Проект стандарт Форматы представления сведений из административной модели, 1588.72kb.
- Маркетинговые критерии оптимального функционирования фармацевтической компании, 241.01kb.
- Лекция № Библиографическое описание документа, 84.67kb.
- Ы (услуги) предприятия и его партнёров, и последующем их исполнении и контроле с помощью, 161.35kb.
| 55 Червячные зубчатые передачи. Червячной называется зубчатая передача, состоящая из двух подвижных звеньев – червяка и зубчатого колеса и предназначенная для передачи и преобразования вращательного движения между ортагональными перекрещивающимися осями. Червяком называют звено, наружная поверхность которого имеет форму винта. Червячным колесом называется зубчатое колесо с косыми зубьями, которое зацепляется с червяком.  Виды червячных передач и червяков. Виды червячных передач и червяков.Червячные передачи подразделяются: 1.по виду делительной поверхности червяка а)цилиндрические червячные передачи – червяк и колесо в передаче имеют цилиндрические делительные и начальные поверхности; б)глобоидные червячные передачи – делительная и начальная поверхности червяка образованы вращением отрезка дуги делительной или начальной поверхности парного червячного колеса вокруг оси червяка; 2.по виду теоретического торцового профиля витка червяка а)архимедов червяк (ZA) – профиль выполнен по архимедовой спирали; б)эвольвентный червяк (ZI) – профиль выполнен по эвольвенте окружности; в)конволютный червяк (ZN) – профиль выполнен по удлиненной эвольвенте. Червячная передача характеризуется передаточным числом u=z1/z2 где z1 – число зубьев колеса (18…300); z2 – число витков червяка (1…4), а также передаточным отношением i=w1/w2=u , где w1 и w2 – угловые скорости соответственно червяка и колеса. Преимущества и недостатки червячных зубчатых передач. Преимущества:
Недостатки:
| 56 Зубчатые передачи с зацеплением М.Л.Новикова. С целью повышения несущей способности зубчатых передач М.Л.Новиков [1] разработал новый способ образования сопряженных поверхностей для различных видов зубчатых передач с параллельными, пересекающимися и перекрещивающимися осями. Новиков предложил перейти от линейного контакта поверхностей к точечному. При этом профили зубьев в торцевом сечении могут быть не взаимоогибаемыми кривыми и их можно выполнять как выпуклый и вогнутый профили с малой разностью кривизны. В передаче с параллельными осями линия зацепления является прямой линией параллельной осям колес. Зацепление Новикова имеет только осевое перекрытие eb = jb1 / t1 = b / pz , где b - ширина зубчатого венца, pz - осевой шаг. Поэтому поверхности зубьев выполняются винтовыми (косозубыми) с углом подъема винтовой линии b = 10 - 30° . Одним из основных параметров зацепления Новикова является расстояние от полюса зацепления Р до точки контакта К, которое определяет положение линии зацепления ( прямой К-К параллельной осям вращения и проходящей через точку контакта К ) относительно оси мгновенного относительного вращения Р-Р. Согласно рекомендациям работы, это расстояние выбирается в зависимости от величины передаваемой мощности в пределах lKP = (0.05 ... 0.2 )× rw1.  Преимущества зубчатых передач с зацеплением Новикова:
К недостаткам передач Новикова можно отнести:
| 57 Сложными зубчатыми механизмами называются механизмы с зубчатыми передачами с числом зубчатых колес больше двух. Это могут быть механизмы с оригинальными структурными схемами или механизмы, образованные последовательным и (или) параллельным соединением простейших типовых зубчатых механизмов. Кинематика рядного зубчатого механизма. Рядным зубчатым механизмом называется сложный зубчатый механизм с неподвижными осями колес, образованный последовательным соединением нескольких простых зубчатых механизмов. Рассмотрим кинематику рядного механизма составленного из двух зубчатых передач: одной внешнего зацепления и одной внутреннего зацепления. Схема механизма изображена на рис. 15.1. Напоминание: Для вращательного движения твердого тела относительно оси проходящей через точку А. Примем для размеров масштаб ml, мм/м, а для линейных скоростей – масштаб mV, мм/м×с-1. Угловая скорость звена i равна  wi = VB/lAB = (ml /mV) × (BB’/AB) = (ml /mV) × tg yi = c× tg yi . Таким образом при графическом кине матическом анализе угловая скорость звена равна произведению тангенса уг ла наклона прямой распределения ли- нейных скоростей на отношение масш- табов длин и скоростей. Аналитическое исследование кинематики рядного механизма. Из основной теоремы зацепления, для первой пары зубчатых колес с внешним зацеплением, можно записать w1/w2 = - rw2/rw1 = - z2/z1; для второй пары зубчатых колес с внутренним зацеплением w2/w3 = rw4/rw3 = z4/z3 . П  ередаточное отношение механизма в целом будет равна ередаточное отношение механизма в целом будет равнаu13 = w1/w3 = (w1/w2) × (w2/w3) = u12 × u23= - (z2×z4)/(z1×z3). Передаточное отношение сложного рядного зубчатого, образованного из нескольких соединенных последовательно простых зубчатых механизмов равно произведению передаточных отношений этих механизмов. Графическое исследование кинематики рядного механизма. Изобразим в масштабе ml, мм/м, кинематическую схему рядного зубчатого механизма. Нанесем на эту схему линейную скорость точки Р1, изобразив ее в произвольном масштабе mV, мм/м×с-1 отрезком Р1Р’1. Соединим конец этого отрезка точку Р’1 с центрами вращения колес 1 и 2 точками 01 и 02 и получим прямые, определяющие распределение линейных скоростей этих звеньев, для точек лежащих на линии центров. Эти прямые образуют с линией центров соответственно углы y1 и y2 . Точка Р2 является точкой касания начальных окружностей колес 3 и 4. Так как в точке касания начальных окружностей линейные скорости звеньев 2 и 3 равны, а распределение линейных скоростей по линии центров для звена 2 известно, то можно определить отрезок Р2Р’2, который изображает скорость точки Р2 в масштабе mV, мм/м×с-1. Соединив прямой точку Р’2 с центром вращения звена 3 получим прямую распределения линейных скоростей для точек звена 3, лежащих на линии центров. Угол, который образует эта прямой с линией центров, обозначим y3 . Угловые скорости звеньев определятся из этой схемы по формулам w1 = (ml /mV) × tg y1 = c× tg y1 , w3 = (ml /mV) × tg y3 = c× tg y3 . Передаточное отношение, рассматриваемого рядного зубчатого механизма, будет равно u13 = w1/w3 = tg y1 / tg y3 . | |||||||||||||
| 58 Сложные зубчатые механизмы, в которых ось хотя бы одного колеса подвижна, называются планетарными механизмами Формула Виллиса. Формула Виллиса выводится на основании основной теоремы зацепления и устанавливает соотношение между угловыми скоростями зубчатых колес в планетарном механизме. Рассмотрим простейший планетарный механизм с одним внешним зацеплением (см. рис. 15.3). Число подвижностей в этом механизме равно Wпл = 3× n - 2×p1 – 1× p2 = 3× 3 - 2×3 – 1× 1= 2 , то есть для получения определенности движения звеньев механизма необходимо сообщить независимые движения двум его звеньям. Рассмотрим движение звеньев механизма относительно стойки и относительно водила. Угловые скорости звеньев в каждом из рассматриваемых движений приведены в таблице 15.2. В движении звеньев относительно водила угловые скорости звеньев равны угловым скоростям в движении относительно стойки минус угловая скорость водила. Если в движении относительно стойки ось зубчатого колеса 2 подвижна, то в движении относительно водила оси обоих зубчатых колес неподвижны. Поэтому к движению относительно водила можно применить основную теорему зацепления. Движение механизма относительно стойки
 Движение механизма относительно водила 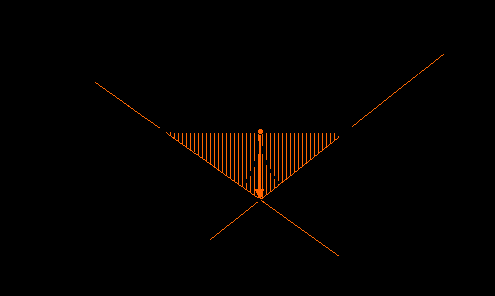 То есть можно записать выражение, которое называется формулой Виллиса для планетарных механизмов w*2 / w*1 = (w1-wh) / (w2-wh) = -z1/z2 . | |||||||||||||||
| 62 Условия подбора чисел зубьев. Условия, которые необходимо выполнить при подборе чисел зубьев колес типового планетарного механизма:
u1h = [ 1+- (z2×z4)/(z1×z3) ] × ( 0.95 … 1.05 ).
mI ( z1 +- z2) = mII × ( z4 +- z3). z1 + z2 = z4 - z3
sin ( p/k ) > max [( z2,3 + 2)/ (z1 + z2) ].
u1h × z1 / k ( 1 + k × р). = B.
zi > zmin.( z с внеш >18)
z с внеш. зуб. > 20 ; z с внутр. зуб. > 85 ; zd = z с внутр. зуб - z с внеш. зуб. > 8 .
R = min [ max ( z1 + 2×z2 ), (kK× z4) ], kK - коэффициент, учитывающий особенности конструкции зубчатого колеса с внутренними зубьями. | |