Лгоритма его функционирования), устранения некорректности первичного описания и последовательного представления (при необходимости) описаний на различных языках
| Вид материала | Документы |
- Х описаний документов и пополнению сводного электронного каталога с целью устранения, 58kb.
- Обеспечение производства ЭВМ базовые понятия (сапр/астпп/саит), 710.17kb.
- Система Автоматизации Инженерного Труда cad computer Automation Design cam computer, 35.46kb.
- Проектирования это создание описания, необходимого для построения в заданных условиях, 258.57kb.
- История описания системных васкулитов, 320.25kb.
- История описания системных васкулитов, 320.23kb.
- Проект стандарт Форматы представления сведений из административной модели, 1588.72kb.
- Маркетинговые критерии оптимального функционирования фармацевтической компании, 241.01kb.
- Лекция № Библиографическое описание документа, 84.67kb.
- Ы (услуги) предприятия и его партнёров, и последующем их исполнении и контроле с помощью, 161.35kb.
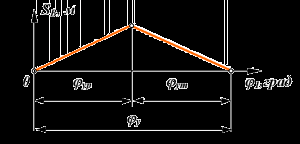
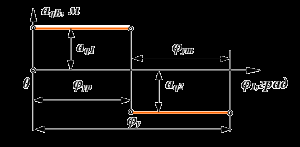
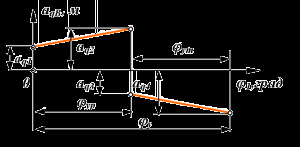
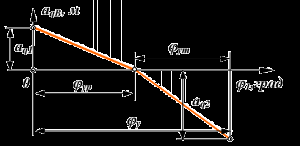
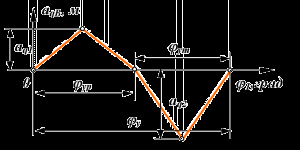
| 65 65 Кулачковые 65 Кулачковые механизмы. Кулачковым называется трехзвенный механизм с высшей кинематической парой входное звено которого называется кулачком, а выходное - толкателем (или коромыслом). Часто для замены в высшей паре трения скольжения трением качения и уменьшения износа, как кулачка, так и толкателя, в схему механизма включают дополнительное звено – ролик и вращательную кинематическую пару. Подвижность в этой кинематической паре не изменяет передаточных функций механизма и является местной подвижностью. Основные параметры кулачкового механизма. Большинство кулачковых механизмов относится к цикловым механизмам с периодом цикла равным 2p . В цикле движения толкателя в общем случае можно выделить четыре фазы: удаления, дальнего стояния (или выстоя), сближения и ближнего стояния. В соответствии с этим, углы поворота кулачка или фазовые углы делятся на: угол удаления jу ; угол дальнего выстоя jдв ; угол сближения jс ; угол ближнего выстоя jбв . Сумма трех углов образует угол jраб = dраб , который называется рабочим углом. jраб = dраб = jу + jдв + jс . Сумма трех углов образует угол jраб = dраб , который называется рабочим углом. jраб = dраб = jу + jдв + jс . Кулачок механизма характеризуется двумя профилями: центровым (или теоретическим) и конструктивным. Под конструктивным понимается наружный рабочий профиль кулачка. Теоретическим или центровым называется профиль, который в системе координат кулачка описывает 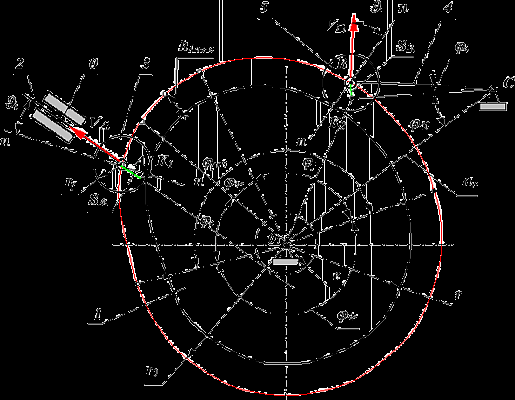 SAi и SВi – текущие значения перемещения центров роликов ; j40 - начальная угловая координата коромысла ; j4 - текущее угловое перемещение коромысла ; hAmax - максимальное перемещение центра ролика ; r0 - радиус начальной шайбы центрового профиля кулачка; r - радиус начальной шайбы конструктивного профиля кулачка; r p - радиус ролика (скругления рабочего участка толкателя); Ji - текущее значение угла давления; aw - межосевое (межцентровое) расстояние; e - внеосность (эксцентриситет); Теоретический профиль кулачка обычно представляется в полярных координатах зависимостью ri = f (di), где ri - радиус-вектор текущей точки теоретического или центрового профиля кулачка. 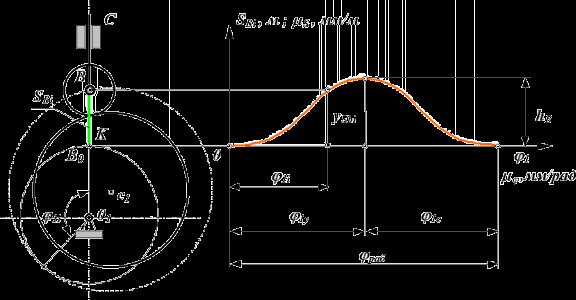
|